 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Clean Room to Machine Room: Commissioning of the First-Generation BrainScaleS Wafer-Scale Neuromorphic System
Mar 22, 2023The first-generation of BrainScaleS, also referred to as BrainScaleS-1, is a neuromorphic system for emulating large-scale networks of spiking neurons. Following a "physical modeling" principle, its VLSI circuits are designed to emulate the dynamics of biological examples: analog circuits implement neurons and synapses with time constants that arise from their electronic components' intrinsic properties. It operates in continuous time, with dynamics typically matching an acceleration factor of 10000 compared to the biological regime. A fault-tolerant design allows it to achieve wafer-scale integration despite unavoidable analog variability and component failures. In this paper, we present the commissioning process of a BrainScaleS-1 wafer module, providing a short description of the system's physical components, illustrating the steps taken during its assembly and the measures taken to operate it. Furthermore, we reflect on the system's development process and the lessons learned to conclude with a demonstration of its functionality by emulating a wafer-scale synchronous firing chain, the largest spiking network emulation ran with analog components and individual synapses to date.
The Operating System of the Neuromorphic BrainScaleS-1 System
Mar 30, 2020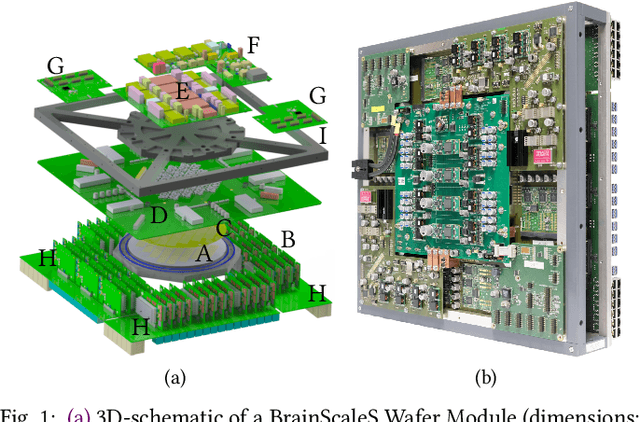
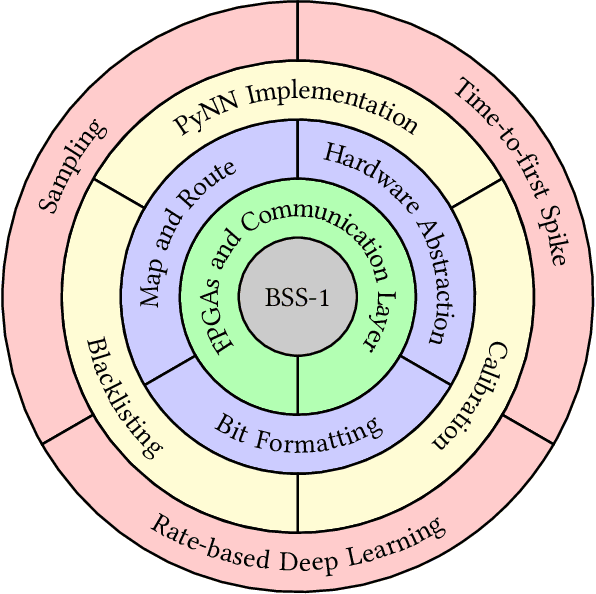
BrainScaleS-1 is a wafer-scale mixed-signal accelerated neuromorphic system targeted for research in the fields of computational neuroscience and beyond-von-Neumann computing. The BrainScaleS Operating System (BrainScaleS OS) is a software stack giving users the possibility to emulate networks described in the high-level network description language PyNN with minimal knowledge of the system. At the same time, expert usage is facilitated by allowing to hook into the system at any depth of the stack. We present operation and development methodologies implemented for the BrainScaleS-1 neuromorphic architecture and walk through the individual components of BrainScaleS OS constituting the software stack for BrainScaleS-1 platform operation.
Generative models on accelerated neuromorphic hardware
Jul 11, 2018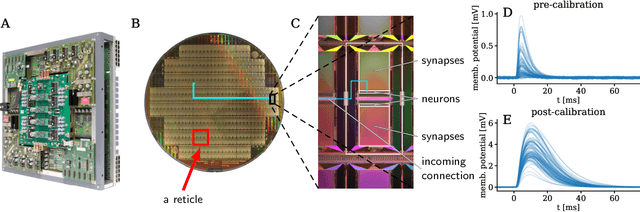
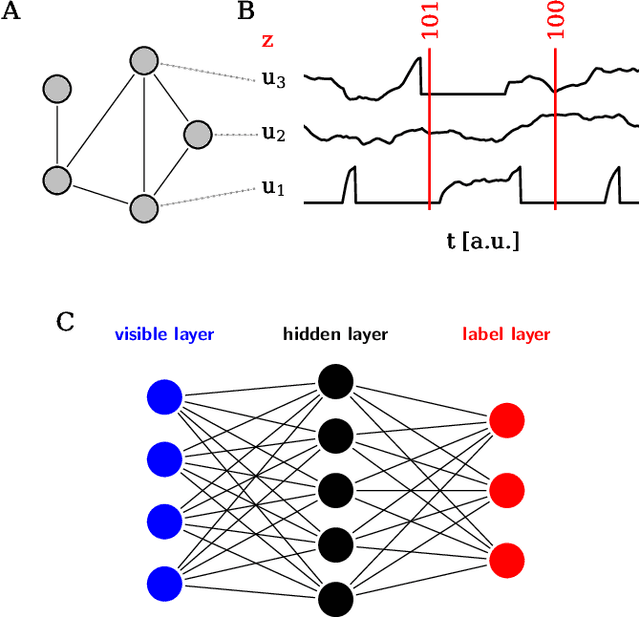
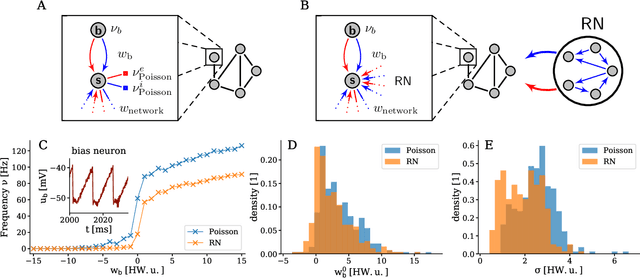
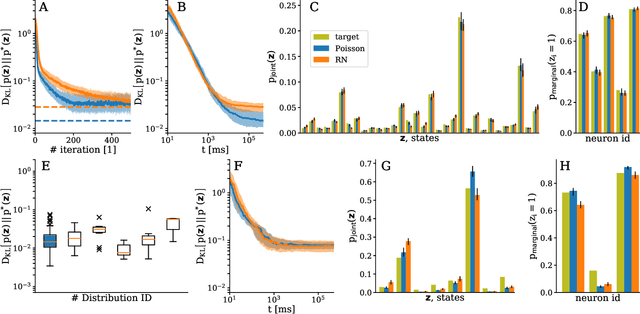
The traditional von Neumann computer architecture faces serious obstacles, both in terms of miniaturization and in terms of heat production, with increasing performance. Artificial neural (neuromorphic) substrates represent an alternative approach to tackle this challenge. A special subset of these systems follow the principle of "physical modeling" as they directly use the physical properties of the underlying substrate to realize computation with analog components. While these systems are potentially faster and/or more energy efficient than conventional computers, they require robust models that can cope with their inherent limitations in terms of controllability and range of parameters. A natural source of inspiration for robust models is neuroscience as the brain faces similar challenges. It has been recently suggested that sampling with the spiking dynamics of neurons is potentially suitable both as a generative and a discriminative model for artificial neural substrates. In this work we present the implementation of sampling with leaky integrate-and-fire neurons on the BrainScaleS physical model system. We prove the sampling property of the network and demonstrate its applicability to high-dimensional datasets. The required stochasticity is provided by a spiking random network on the same substrate. This allows the system to run in a self-contained fashion without external stochastic input from the host environment. The implementation provides a basis as a building block in large-scale biologically relevant emulations, as a fast approximate sampler or as a framework to realize on-chip learning on (future generations of) accelerated spiking neuromorphic hardware. Our work contributes to the development of robust computation on physical model systems.
Full Wafer Redistribution and Wafer Embedding as Key Technologies for a Multi-Scale Neuromorphic Hardware Cluster
Jan 15, 2018
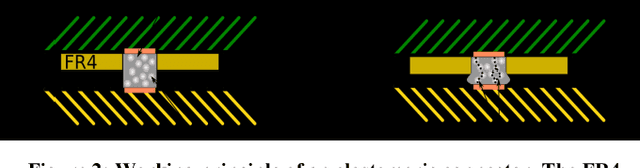
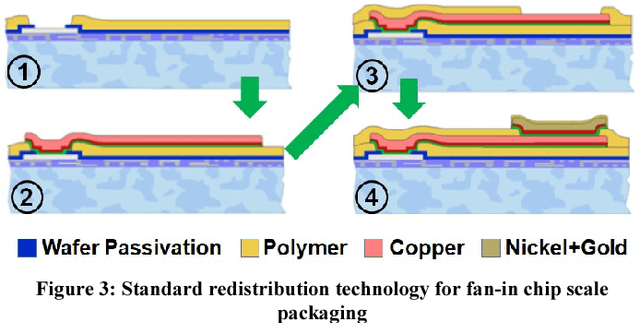
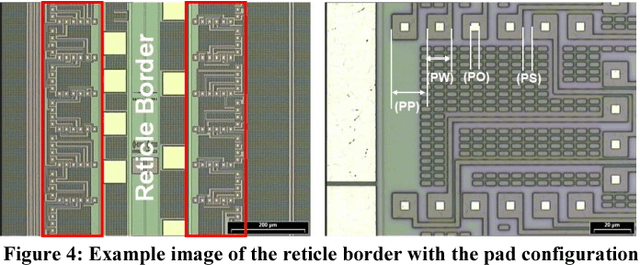
Together with the Kirchhoff-Institute for Physics(KIP) the Fraunhofer IZM has developed a full wafer redistribution and embedding technology as base for a large-scale neuromorphic hardware system. The paper will give an overview of the neuromorphic computing platform at the KIP and the associated hardware requirements which drove the described technological developments. In the first phase of the project standard redistribution technologies from wafer level packaging were adapted to enable a high density reticle-to-reticle routing on 200mm CMOS wafers. Neighboring reticles were interconnected across the scribe lines with an 8{\mu}m pitch routing based on semi-additive copper metallization. Passivation by photo sensitive benzocyclobutene was used to enable a second intra-reticle routing layer. Final IO pads with flash gold were generated on top of each reticle. With that concept neuromorphic systems based on full wafers could be assembled and tested. The fabricated high density inter-reticle routing revealed a very high yield of larger than 99.9%. In order to allow an upscaling of the system size to a large number of wafers with feasible effort a full wafer embedding concept for printed circuit boards was developed and proven in the second phase of the project. The wafers were thinned to 250{\mu}m and laminated with additional prepreg layers and copper foils into a core material. After lamination of the PCB panel the reticle IOs of the embedded wafer were accessed by micro via drilling, copper electroplating, lithography and subtractive etching of the PCB wiring structure. The created wiring with 50um line width enabled an access of the reticle IOs on the embedded wafer as well as a board level routing. The panels with the embedded wafers were subsequently stressed with up to 1000 thermal cycles between 0C and 100C and have shown no severe failure formation over the cycle time.
Pattern representation and recognition with accelerated analog neuromorphic systems
Jul 03, 2017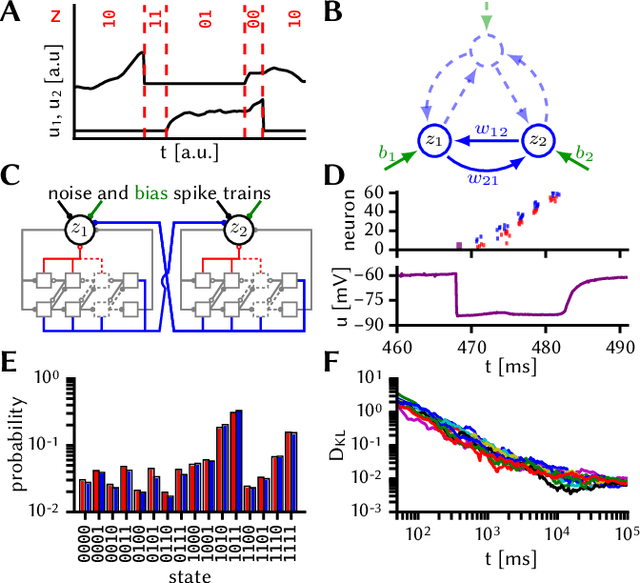

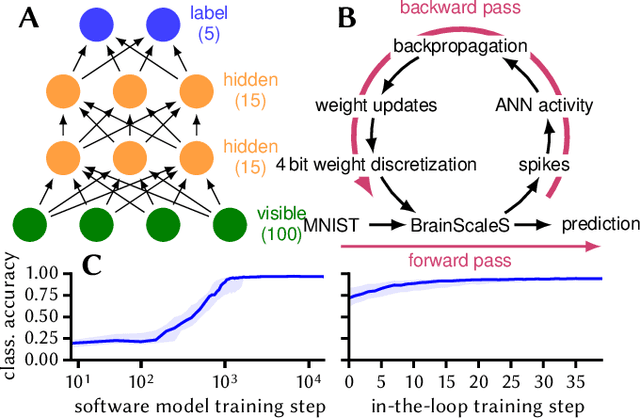
Despite being originally inspired by the central nervous system, artificial neural networks have diverged from their biological archetypes as they have been remodeled to fit particular tasks. In this paper, we review several possibilites to reverse map these architectures to biologically more realistic spiking networks with the aim of emulating them on fast, low-power neuromorphic hardware. Since many of these devices employ analog components, which cannot be perfectly controlled, finding ways to compensate for the resulting effects represents a key challenge. Here, we discuss three different strategies to address this problem: the addition of auxiliary network components for stabilizing activity, the utilization of inherently robust architectures and a training method for hardware-emulated networks that functions without perfect knowledge of the system's dynamics and parameters. For all three scenarios, we corroborate our theoretical considerations with experimental results on accelerated analog neuromorphic platforms.
* accepted at ISCAS 2017