 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproduction of AdEx dynamics on neuromorphic hardware through data embedding and simulation-based inference
Dec 03, 2024The development of mechanistic models of physical systems is essential for understanding their behavior and formulating predictions that can be validated experimentally. Calibration of these models, especially for complex systems, requires automated optimization methods due to the impracticality of manual parameter tuning. In this study, we use an autoencoder to automatically extract relevant features from the membrane trace of a complex neuron model emulated on the BrainScaleS-2 neuromorphic system, and subsequently leverage sequential neural posterior estimation (SNPE), a simulation-based inference algorithm, to approximate the posterior distribution of neuron parameters. Our results demonstrate that the autoencoder is able to extract essential features from the observed membrane traces, with which the SNPE algorithm is able to find an approximation of the posterior distribution. This suggests that the combination of an autoencoder with the SNPE algorithm is a promising optimization method for complex systems.
Simulation-based Inference for Model Parameterization on Analog Neuromorphic Hardware
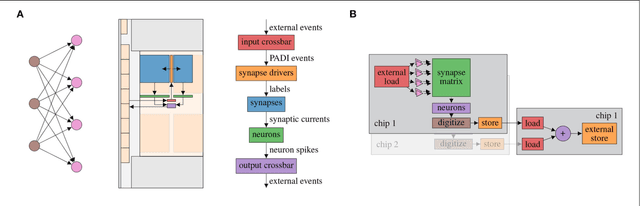
Mar 28, 2023The BrainScaleS-2 (BSS-2) system implements physical models of neurons as well as synapses and aims for an energy-efficient and fast emulation of biological neurons. When replicating neuroscientific experiment results, a major challenge is finding suitable model parameters. This study investigates the suitability of the sequential neural posterior estimation (SNPE) algorithm for parameterizing a multi-compartmental neuron model emulated on the BSS-2 analog neuromorphic hardware system. In contrast to other optimization methods such as genetic algorithms or stochastic searches, the SNPE algorithms belongs to the class of approximate Bayesian computing (ABC) methods and estimates the posterior distribution of the model parameters; access to the posterior allows classifying the confidence in parameter estimations and unveiling correlation between model parameters. In previous applications, the SNPE algorithm showed a higher computational efficiency than traditional ABC methods. For our multi-compartmental model, we show that the approximated posterior is in agreement with experimental observations and that the identified correlation between parameters is in agreement with theoretical expectations. Furthermore, we show that the algorithm can deal with high-dimensional observations and parameter spaces. These results suggest that the SNPE algorithm is a promising approach for automating the parameterization of complex models, especially when dealing with characteristic properties of analog neuromorphic substrates, such as trial-to-trial variations or limited parameter ranges.
From Clean Room to Machine Room: Commissioning of the First-Generation BrainScaleS Wafer-Scale Neuromorphic System
Mar 22, 2023The first-generation of BrainScaleS, also referred to as BrainScaleS-1, is a neuromorphic system for emulating large-scale networks of spiking neurons. Following a "physical modeling" principle, its VLSI circuits are designed to emulate the dynamics of biological examples: analog circuits implement neurons and synapses with time constants that arise from their electronic components' intrinsic properties. It operates in continuous time, with dynamics typically matching an acceleration factor of 10000 compared to the biological regime. A fault-tolerant design allows it to achieve wafer-scale integration despite unavoidable analog variability and component failures. In this paper, we present the commissioning process of a BrainScaleS-1 wafer module, providing a short description of the system's physical components, illustrating the steps taken during its assembly and the measures taken to operate it. Furthermore, we reflect on the system's development process and the lessons learned to conclude with a demonstration of its functionality by emulating a wafer-scale synchronous firing chain, the largest spiking network emulation ran with analog components and individual synapses to date.
A Scalable Approach to Modeling on Accelerated Neuromorphic Hardware
Mar 21, 2022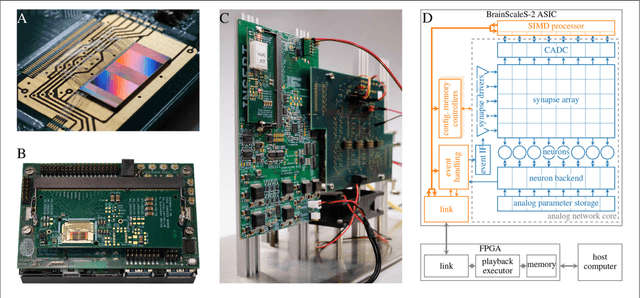
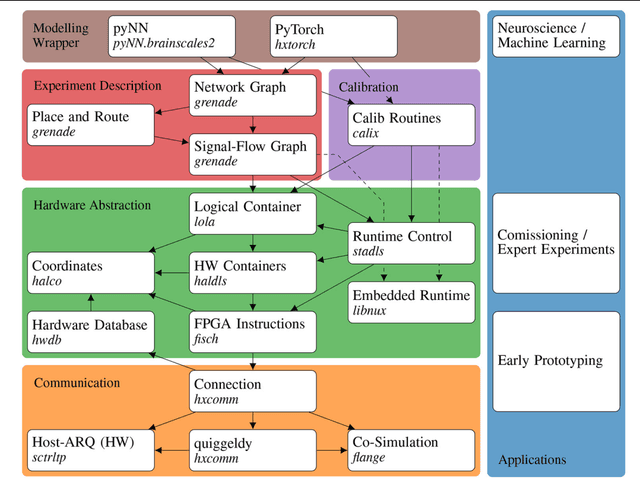
Neuromorphic systems open up opportunities to enlarge the explorative space for computational research. However, it is often challenging to unite efficiency and usability. This work presents the software aspects of this endeavor for the BrainScaleS-2 system, a hybrid accelerated neuromorphic hardware architecture based on physical modeling. We introduce key aspects of the BrainScaleS-2 Operating System: experiment workflow, API layering, software design, and platform operation. We present use cases to discuss and derive requirements for the software and showcase the implementation. The focus lies on novel system and software features such as multi-compartmental neurons, fast re-configuration for hardware-in-the-loop training, applications for the embedded processors, the non-spiking operation mode, interactive platform access, and sustainable hardware/software co-development. Finally, we discuss further developments in terms of hardware scale-up, system usability and efficiency.
The BrainScaleS-2 accelerated neuromorphic system with hybrid plasticity
Feb 03, 2022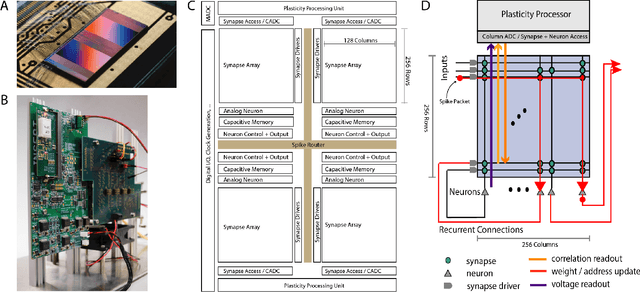
Since the beginning of information processing by electronic components, the nervous system has served as a metaphor for the organization of computational primitives. Brain-inspired computing today encompasses a class of approaches ranging from using novel nano-devices for computation to research into large-scale neuromorphic architectures, such as TrueNorth, SpiNNaker, BrainScaleS, Tianjic, and Loihi. While implementation details differ, spiking neural networks - sometimes referred to as the third generation of neural networks - are the common abstraction used to model computation with such systems. Here we describe the second generation of the BrainScaleS neuromorphic architecture, emphasizing applications enabled by this architecture. It combines a custom analog accelerator core supporting the accelerated physical emulation of bio-inspired spiking neural network primitives with a tightly coupled digital processor and a digital event-routing network.
The Operating System of the Neuromorphic BrainScaleS-1 System
Mar 30, 2020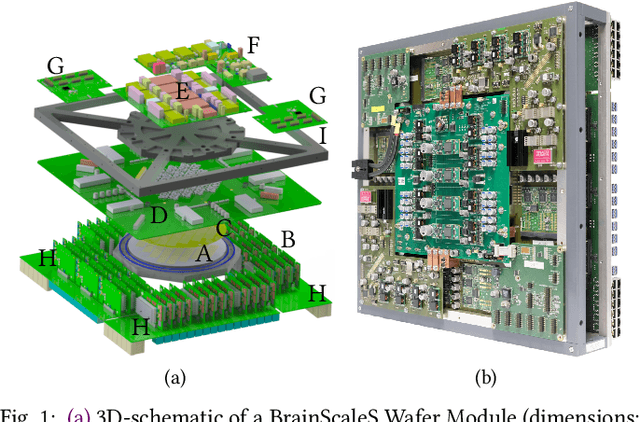
BrainScaleS-1 is a wafer-scale mixed-signal accelerated neuromorphic system targeted for research in the fields of computational neuroscience and beyond-von-Neumann computing. The BrainScaleS Operating System (BrainScaleS OS) is a software stack giving users the possibility to emulate networks described in the high-level network description language PyNN with minimal knowledge of the system. At the same time, expert usage is facilitated by allowing to hook into the system at any depth of the stack. We present operation and development methodologies implemented for the BrainScaleS-1 neuromorphic architecture and walk through the individual components of BrainScaleS OS constituting the software stack for BrainScaleS-1 platform operation.