 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLO11-4K: An Efficient Architecture for Real-Time Small Object Detection in 4K Panoramic Images
Dec 18, 2025The processing of omnidirectional 360-degree images poses significant challenges for object detection due to inherent spatial distortions, wide fields of view, and ultra-high-resolution inputs. Conventional detectors such as YOLO are optimised for standard image sizes (for example, 640x640 pixels) and often struggle with the computational demands of 4K or higher-resolution imagery typical of 360-degree vision. To address these limitations, we introduce YOLO11-4K, an efficient real-time detection framework tailored for 4K panoramic images. The architecture incorporates a novel multi-scale detection head with a P2 layer to improve sensitivity to small objects often missed at coarser scales, and a GhostConv-based backbone to reduce computational complexity without sacrificing representational power. To enable evaluation, we manually annotated the CVIP360 dataset, generating 6,876 frame-level bounding boxes and producing a publicly available, detection-ready benchmark for 4K panoramic scenes. YOLO11-4K achieves 0.95 mAP at 0.50 IoU with 28.3 milliseconds inference per frame, representing a 75 percent latency reduction compared to YOLO11 (112.3 milliseconds), while also improving accuracy (mAP at 0.50 of 0.95 versus 0.908). This balance of efficiency and precision enables robust object detection in expansive 360-degree environments, making the framework suitable for real-world high-resolution panoramic applications. While this work focuses on 4K omnidirectional images, the approach is broadly applicable to high-resolution detection tasks in autonomous navigation, surveillance, and augmented reality.
Understanding visual attention beehind bee-inspired UAV navigation
Jul 16, 2025



Bio-inspired design is often used in autonomous UAV navigation due to the capacity of biological systems for flight and obstacle avoidance despite limited sensory and computational capabilities. In particular, honeybees mainly use the sensory input of optic flow, the apparent motion of objects in their visual field, to navigate cluttered environments. In our work, we train a Reinforcement Learning agent to navigate a tunnel with obstacles using only optic flow as sensory input. We inspect the attention patterns of trained agents to determine the regions of optic flow on which they primarily base their motor decisions. We find that agents trained in this way pay most attention to regions of discontinuity in optic flow, as well as regions with large optic flow magnitude. The trained agents appear to navigate a cluttered tunnel by avoiding the obstacles that produce large optic flow, while maintaining a centered position in their environment, which resembles the behavior seen in flying insects. This pattern persists across independently trained agents, which suggests that this could be a good strategy for developing a simple explicit control law for physical UAVs.
Radio Source Localization using Sparse Signal Measurements from Uncrewed Ground Vehicles
Dec 06, 2023



Radio source localization can benefit many fields, including wireless communications, radar, radio astronomy, wireless sensor networks, positioning systems, and surveillance systems. However, accurately estimating the position of a radio transmitter using a remote sensor is not an easy task, as many factors contribute to the highly dynamic behavior of radio signals. In this study, we investigate techniques to use a mobile robot to explore an outdoor area and localize the radio source using sparse Received Signal Strength Indicator (RSSI) measurements. We propose a novel radio source localization method with fast turnaround times and reduced complexity compared to the state-of-the-art. Our technique uses RSSI measurements collected while the robot completed a sparse trajectory using a coverage path planning map. The mean RSSI within each grid cell was used to find the most likely cell containing the source. Three techniques were analyzed with the data from eight field tests using a mobile robot. The proposed method can localize a gas source in a basketball field with a 1.2 m accuracy and within three minutes of convergence time, whereas the state-of-the-art active sensing technique took more than 30 minutes to reach a source estimation accuracy below 1 m.
The race to robustness: exploiting fragile models for urban camouflage and the imperative for machine learning security
Jun 26, 2023


Adversarial Machine Learning (AML) represents the ability to disrupt Machine Learning (ML) algorithms through a range of methods that broadly exploit the architecture of deep learning optimisation. This paper presents Distributed Adversarial Regions (DAR), a novel method that implements distributed instantiations of computer vision-based AML attack methods that may be used to disguise objects from image recognition in both white and black box settings. We consider the context of object detection models used in urban environments, and benchmark the MobileNetV2, NasNetMobile and DenseNet169 models against a subset of relevant images from the ImageNet dataset. We evaluate optimal parameters (size, number and perturbation method), and compare to state-of-the-art AML techniques that perturb the entire image. We find that DARs can cause a reduction in confidence of 40.4% on average, but with the benefit of not requiring the entire image, or the focal object, to be perturbed. The DAR method is a deliberately simple approach where the intention is to highlight how an adversary with very little skill could attack models that may already be productionised, and to emphasise the fragility of foundational object detection models. We present this as a contribution to the field of ML security as well as AML. This paper contributes a novel adversarial method, an original comparison between DARs and other AML methods, and frames it in a new context - that of urban camouflage and the necessity for ML security and model robustness.
Response Component Analysis for Sea State Estimation Using Artificial Neural Networks and Vessel Response Spectral Data
May 05, 2022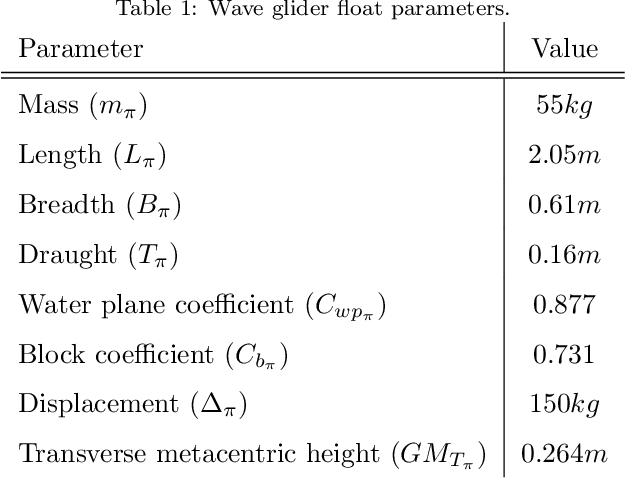
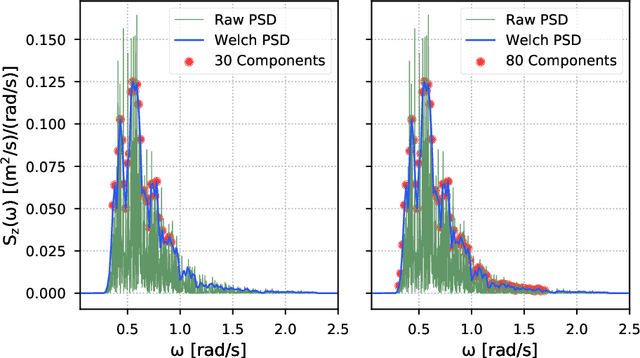
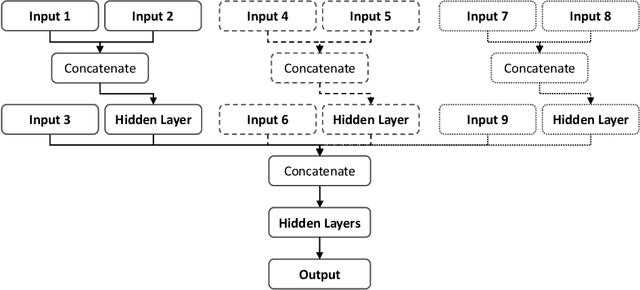
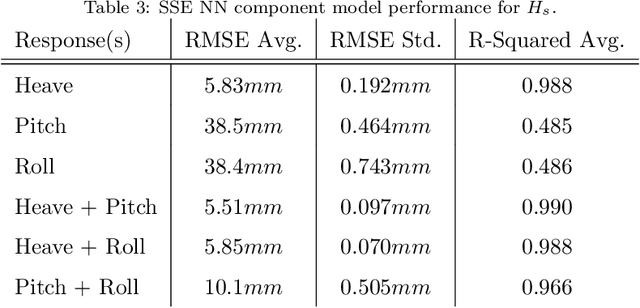
The use of the `ship as a wave buoy analogy' (SAWB) provides a novel means to estimate sea states, where relationships are established between causal wave properties and vessel motion response information. This study focuses on a model-free machine learning approach to SAWB-based sea state estimation (SSE), using neural networks (NNs) to map vessel response spectral data to statistical wave properties. Results showed a strong correlation between heave responses and significant wave height estimates, whilst the accuracy of mean wave period and wave heading predictions were observed to improve considerably when data from multiple vessel degrees of freedom (DOFs) was utilized. Overall, 3-DOF (heave, pitch and roll) NNs for SSE were shown to perform well when compared to existing SSE approaches that use similar simulation setups. Given the information-dense statistical representation of vessel motion responses in spectral form, as well as the ability of NNs to effectively model complex relationships between variables, the designed SSE method shows promise for future adaptation to mobile SSE systems using the SAWB approach.
Disturbances in Influence of a Shepherding Agent is More Impactful than Sensorial Noise During Swarm Guidance
Oct 03, 2020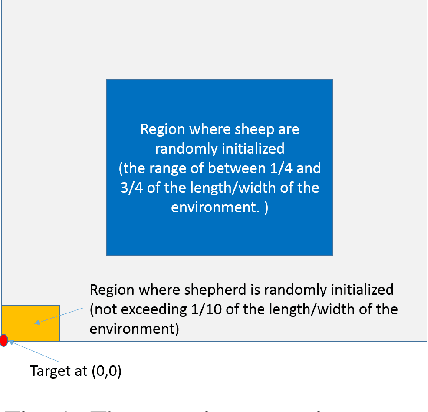
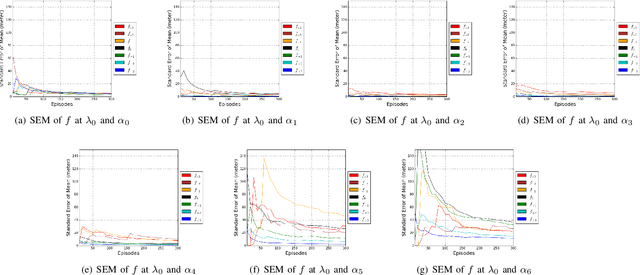
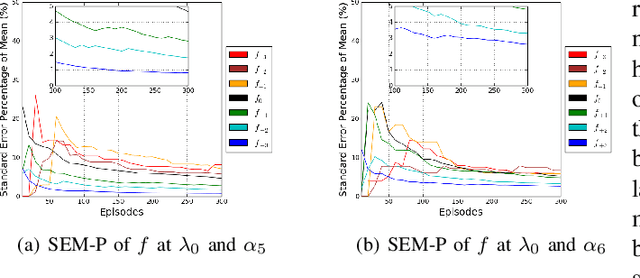
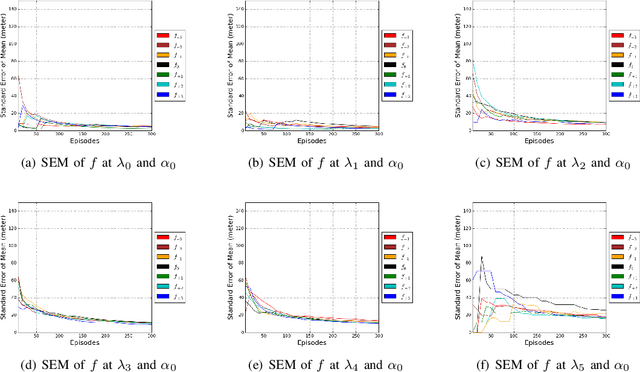
The guidance of a large swarm is a challenging control problem. Shepherding offers one approach to guide a large swarm using a few shepherding agents (sheepdogs). While noise is an inherent characteristic in many real-world problems, the impact of noise on shepherding is not a well-studied problem. We study two forms of noise. First, we evaluate noise in the sensorial information received by the shepherd about the location of sheep. Second, we evaluate noise in the ability of the sheepdog to influence sheep due to disturbance forces occurring during actuation. We study both types of noise in this paper, and investigate the performance of Str\"{o}mbom's approach under these actuation and perception noises. To ensure that the parameterisation of the algorithm creates a stable performance, we need to run a large number of simulations, while increasing the number of random episodes until stability is achieved. We then systematically study the impact of sensorial and actuation noise on performance. Str\"{o}mbom's approach is found to be more sensitive to actuation noise than perception noise. This implies that it is more important for the shepherding agent to influence the sheep more accurately by reducing actuation noise than attempting to reduce noise in its sensors. Moreover, different levels of noise required different parameterisation for the shepherding agent, where the threshold needed by an agent to decide whether or not to collect astray sheep is different for different noise levels.
Continuous Deep Hierarchical Reinforcement Learning for Ground-Air Swarm Shepherding
Apr 27, 2020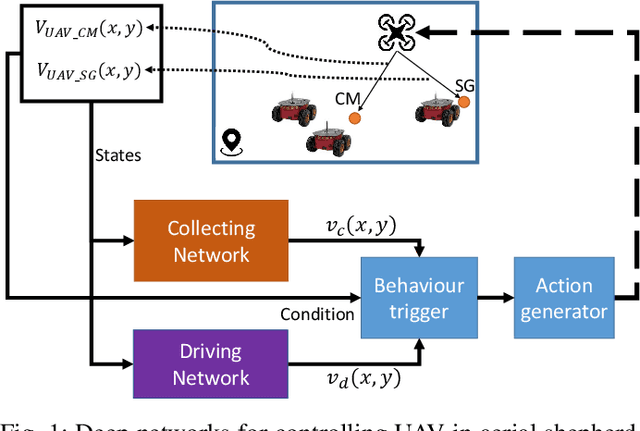


The control and guidance of multi-robots (swarm) is a non-trivial problem due to the complexity inherent in the coupled interaction among the group. Whether the swarm is cooperative or non cooperative, lessons could be learnt from sheepdogs herding sheep. Biomimicry of shepherding offers computational methods for swarm control with the potential to generalize and scale in different environments. However, learning to shepherd is complex due to the large search space that a machine learner is faced with. We present a deep hierarchical reinforcement learning approach for shepherding, whereby an unmanned aerial vehicle (UAV) learns to act as an Aerial sheepdog to control and guide a swarm of unmanned ground vehicles (UGVs). The approach extends our previous work on machine education to decompose the search space into hierarchically organized curriculum. Each lesson in the curriculum is learnt by a deep reinforcement learning model. The hierarchy is formed by fusing the outputs of the model. The approach is demonstrated first in a high-fidelity robotic-operating-system (ROS)-based simulation environment, then with physical UGVs and a UAV in an in-door testing facility. We investigate the ability of the method to generalize as the models move from simulation to the real-world and as the models move from one scale to another.
Crossing the Reality Gap with Evolved Plastic Neurocontrollers
Feb 23, 2020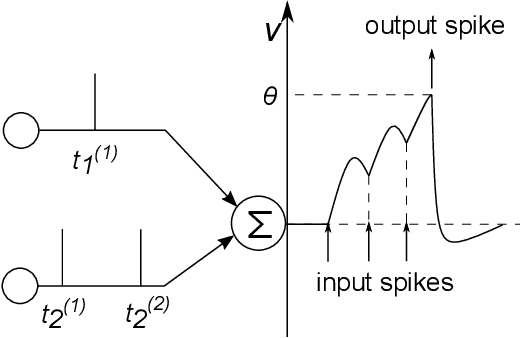

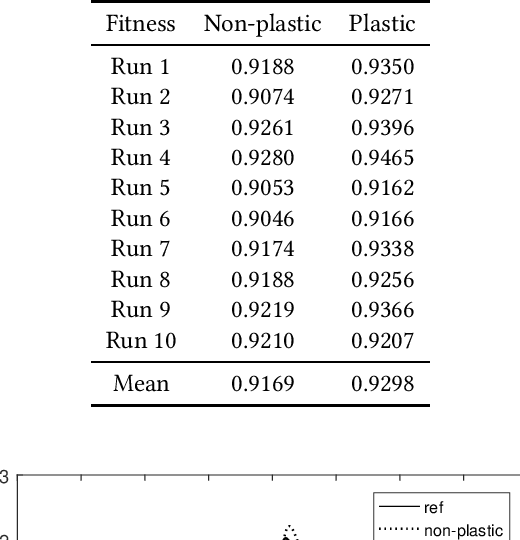
A critical issue in evolutionary robotics is the transfer of controllers learned in simulation to reality. This is especially the case for small Unmanned Aerial Vehicles (UAVs), as the platforms are highly dynamic and susceptible to breakage. Previous approaches often require simulation models with a high level of accuracy, otherwise significant errors may arise when the well-designed controller is being deployed onto the targeted platform. Here we try to overcome the transfer problem from a different perspective, by designing a spiking neurocontroller which uses synaptic plasticity to cross the reality gap via online adaptation. Through a set of experiments we show that the evolved plastic spiking controller can maintain its functionality by self-adapting to model changes that take place after evolutionary training, and consequently exhibit better performance than its non-plastic counterpart.
A Comprehensive Review of Shepherding as a Bio-inspired Swarm-Robotics Guidance Approach
Dec 18, 2019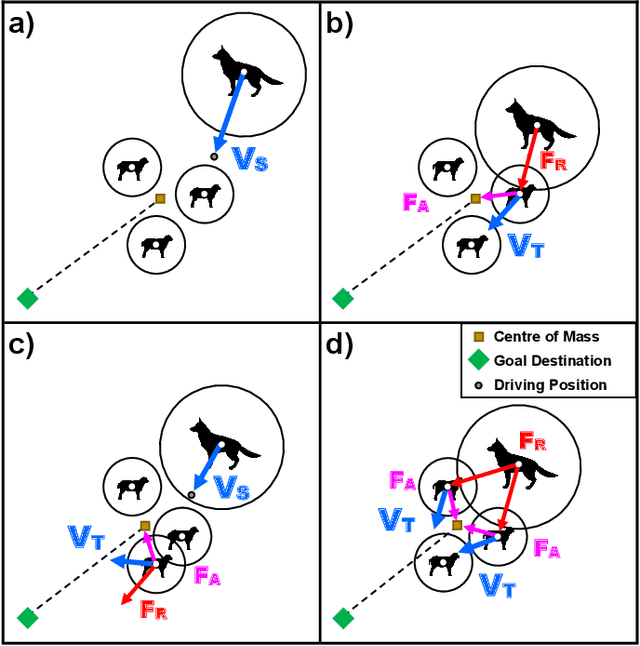
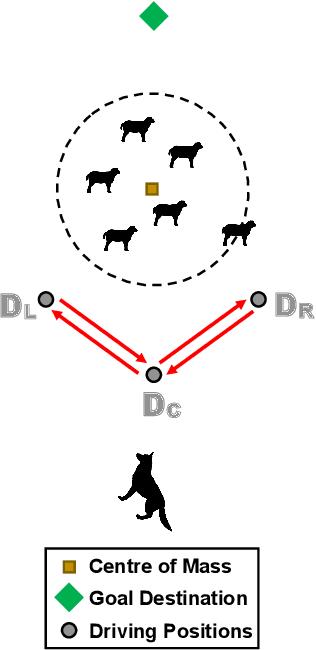
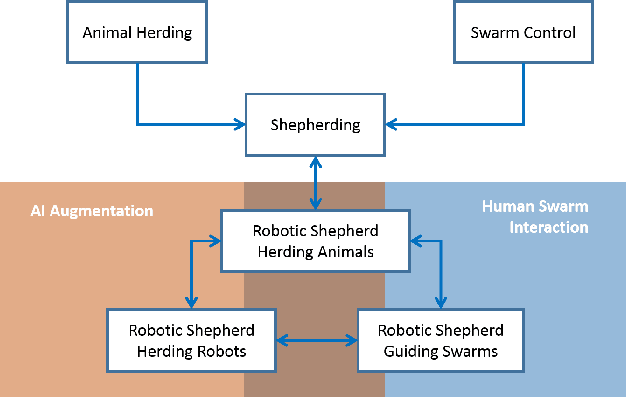
The simultaneous control of multiple coordinated robotic agents represents an elaborate problem. If solved, however, the interaction between the agents can lead to solutions to sophisticated problems. The concept of swarming, inspired by nature, can be described as the emergence of complex system-level behaviors from the interactions of relatively elementary agents. Due to the effectiveness of solutions found in nature, bio-inspired swarming-based control techniques are receiving a lot of attention in robotics. One method, known as swarm shepherding, is founded on the sheep herding behavior exhibited by sheepdogs, where a swarm of relatively simple agents are governed by a shepherd (or shepherds) which is responsible for high-level guidance and planning. Many studies have been conducted on shepherding as a control technique, ranging from the replication of sheep herding via simulation, to the control of uninhabited vehicles and robots for a variety of applications. We present a comprehensive review of the literature on swarm shepherding to reveal the advantages and potential of the approach to be applied to a plethora of robotic systems in the future.
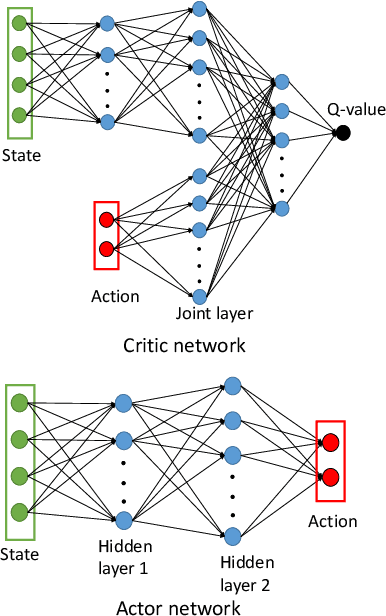
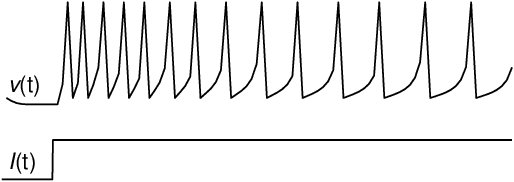
Evolving Spiking Neural Networks for Nonlinear Control Problems
Mar 04, 2019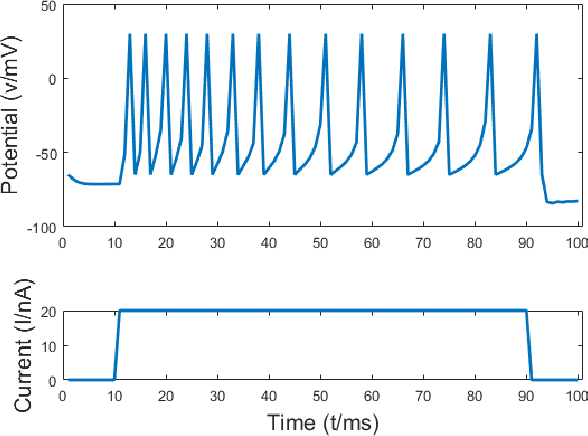
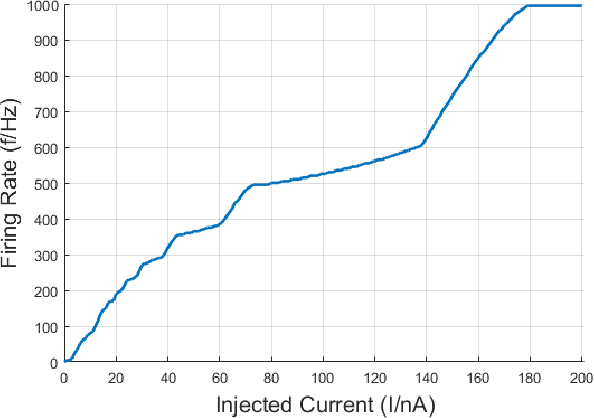
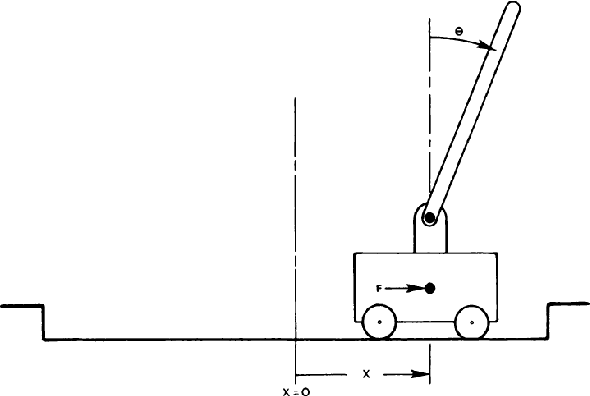
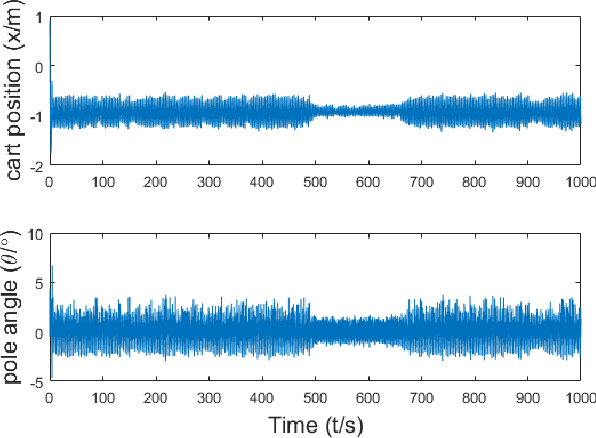
Spiking Neural Networks are powerful computational modelling tools that have attracted much interest because of the bioinspired modelling of synaptic interactions between neurons. Most of the research employing spiking neurons has been non-behavioural and discontinuous. Comparatively, this paper presents a recurrent spiking controller that is capable of solving nonlinear control problems in continuous domains using a popular topology evolution algorithm as the learning mechanism. We propose two mechanisms necessary to the decoding of continuous signals from discrete spike transmission: (i) a background current component to maintain frequency sufficiency for spike rate decoding, and (ii) a general network structure that derives strength from topology evolution. We demonstrate that the proposed spiking controller can learn significantly faster to discover functional solutions than sigmoidal neural networks in solving a classic nonlinear control problem.