 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Fuzzy Q-Learning-Based Strictly Negative Imaginary Tracking Controllers for the Uncertain Quadrotor Systems
Mar 26, 2022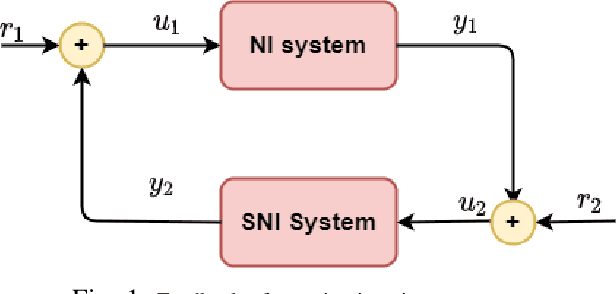
Quadrotors are one of the popular unmanned aerial vehicles (UAVs) due to their versatility and simple design. However, the tuning of gains for quadrotor flight controllers can be laborious, and accurately stable control of trajectories can be difficult to maintain under exogenous disturbances and uncertain system parameters. This paper introduces a novel robust and adaptive control synthesis methodology for a quadrotor robot's attitude and altitude stabilization. The developed method is based on the fuzzy reinforcement learning and Strictly Negative Imaginary (SNI) property. The first stage of our control approach is to transform a nonlinear quadrotor system into an equivalent Negative-Imaginary (NI) linear model by means of the feedback linearization (FL) technique. The second phase is to design a control scheme that adapts online the Strictly Negative Imaginary (SNI) controller gains via fuzzy Q-learning, inspired by biological learning. The proposed controller does not require any prior training. The performance of the designed controller is compared with that of a fixed-gain SNI controller, a fuzzy-SNI controller, and a conventional PID controller in a series of numerical simulations. Furthermore, the stability of the proposed controller and the adaptive laws are proofed using the NI theorem.
Analysis of closed-loop inertial gradient dynamics
Mar 10, 2022



In this paper, we analyse the performance of the closed-loop Whiplash gradient descent algorithm for L-smooth convex cost functions. Using numerical experiments, we study the algorithm's performance for convex cost functions, for different condition numbers. We analyse the convergence of the momentum sequence using symplectic integration and introduce the concept of relaxation sequences which analyses the non-classical character of the whiplash method. Under the additional assumption of invexity, we establish a momentum-driven adaptive convergence rate. Furthermore, we introduce an energy method for predicting the convergence rate with convex cost functions for closed-loop inertial gradient dynamics, using an integral anchored energy function and a novel lower bound asymptotic notation, by exploiting the bounded nature of the solutions. Using this, we establish a polynomial convergence rate for the whiplash inertial gradient system, for a family of scalar quadratic cost functions and an exponential rate for a quadratic scalar cost function.
* Accepted for the 13th Asian Control Conference, 2022
Time-Varying Formation Control of a Collaborative Multi-Agent System Using Negative-Imaginary Systems Theory
Nov 15, 2018



The movement of cooperative robots in a densely cluttered environment may not be possible if the formation type is invariant. Hence, we investigate a new method for time-varying formation control for a group of heterogeneous autonomous vehicles, which may include Unmanned Ground Vehicles (UGV) and Unmanned Aerial Vehicles (UAV). We have extended a Negative-Imaginary (NI) consensus control approach to switch the formation shape of the robots whilst only using the relative distance between agents and between agents and obstacles. All agents can automatically create a new safe formation to overcome obstacles based on a novel geometric method, then restore the prototype formation once the obstacles are cleared. Furthermore, we improve the position consensus at sharp corners by achieving yaw consensus between robots. Simulation and experimental results are then analyzed to validate the feasibility of our proposed approach.
Distributed Obstacle and Multi-Robot Collision Avoidance in Uncertain Environments
Nov 15, 2018



This paper tackles the distributed leader-follower (L-F) control problem for heterogeneous mobile robots in unknown environments requiring obstacle avoidance, inter-robot collision avoidance, and reliable robot communications. To prevent an inter-robot collision, we employ a virtual propulsive force between robots. For obstacle avoidance, we present a novel distributed Negative-Imaginary (NI) variant formation tracking control approach and a dynamic network topology methodology which allows the formation to change its shape and the robot to switch their roles. In the case of communication or sensor loss, a UAV, controlled by a Strictly-Negative-Imaginary (SNI) controller with good wind resistance characteristics, is utilized to track the position of the UGV formation using its camera. Simulations and indoor experiments have been conducted to validate the proposed methods.
Planar Cooperative Extremum Seeking with Guaranteed Convergence Using A Three-Robot Formation
Sep 11, 2018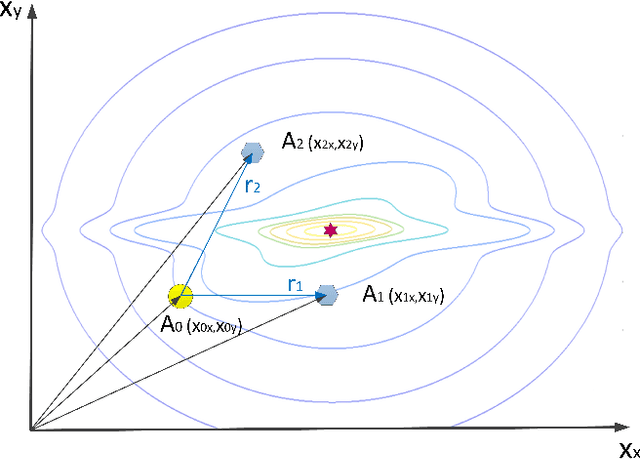
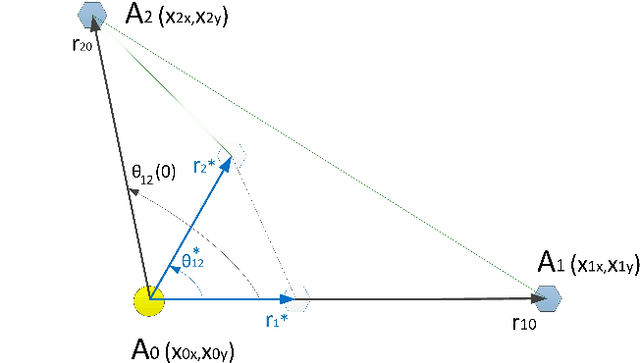
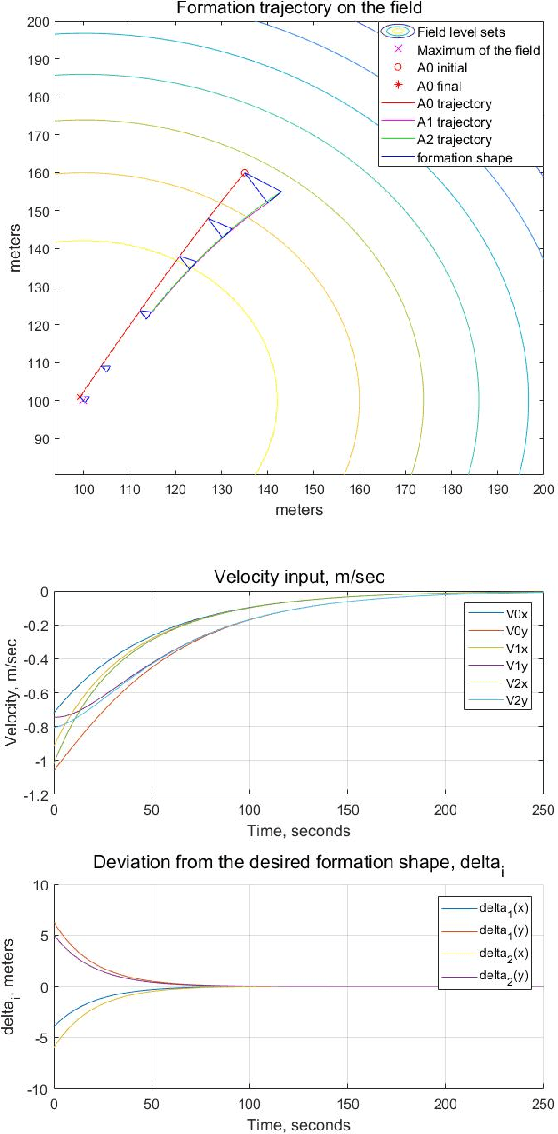
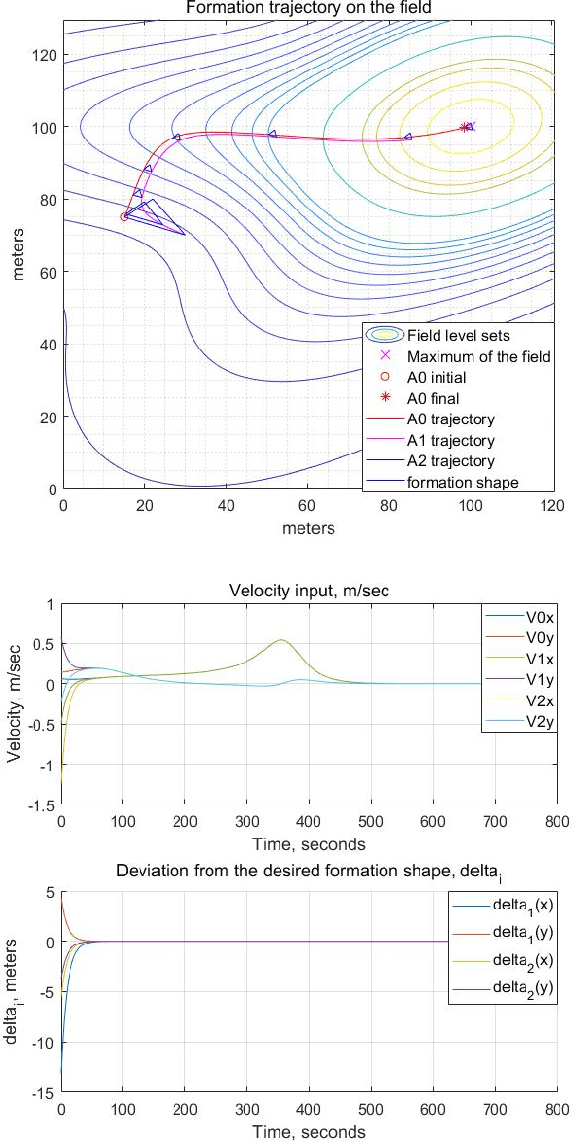
In this paper, a combined formation acquisition and cooperative extremum seeking control scheme is proposed for a team of three robots moving on a plane. The extremum seeking task is to find the maximizer of an unknown two-dimensional function on the plane. The function represents the signal strength field due to a source located at maximizer, and is assumed to be locally concave around maximizer and monotonically decreasing in distance to the source location. Taylor expansions of the field function at the location of a particular lead robot and the maximizer are used together with a gradient estimator based on signal strength measurements of the robots to design and analyze the proposed control scheme. The proposed scheme is proven to exponentially and simultaneously (i) acquire the specified geometric formation and (ii) drive the lead robot to a specified neighborhood disk around maximizer, whose radius depends on the specified desired formation size as well as the norm bounds of the Hessian of the field function. The performance of the proposed control scheme is evaluated using a set of simulation experiments.