 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanar Cooperative Extremum Seeking with Guaranteed Convergence Using A Three-Robot Formation
Sep 11, 2018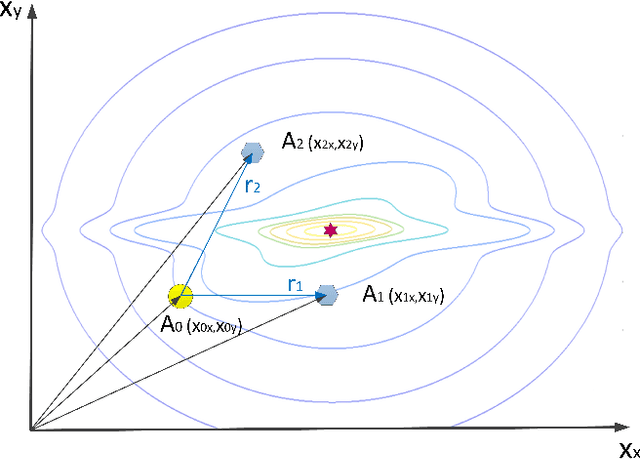
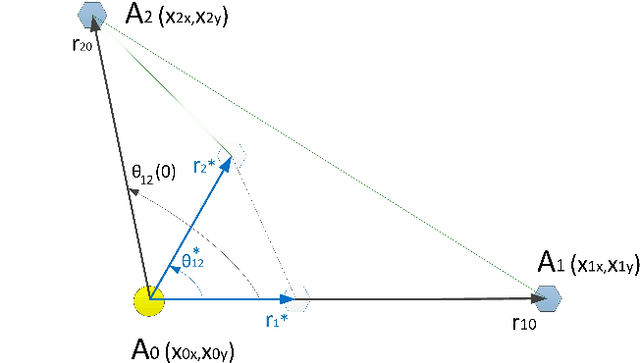
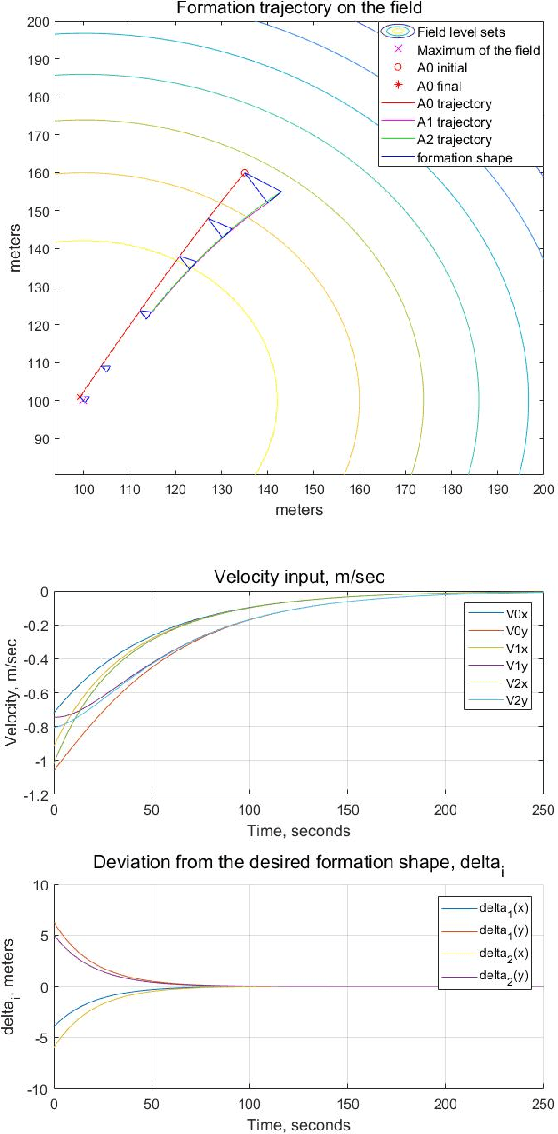
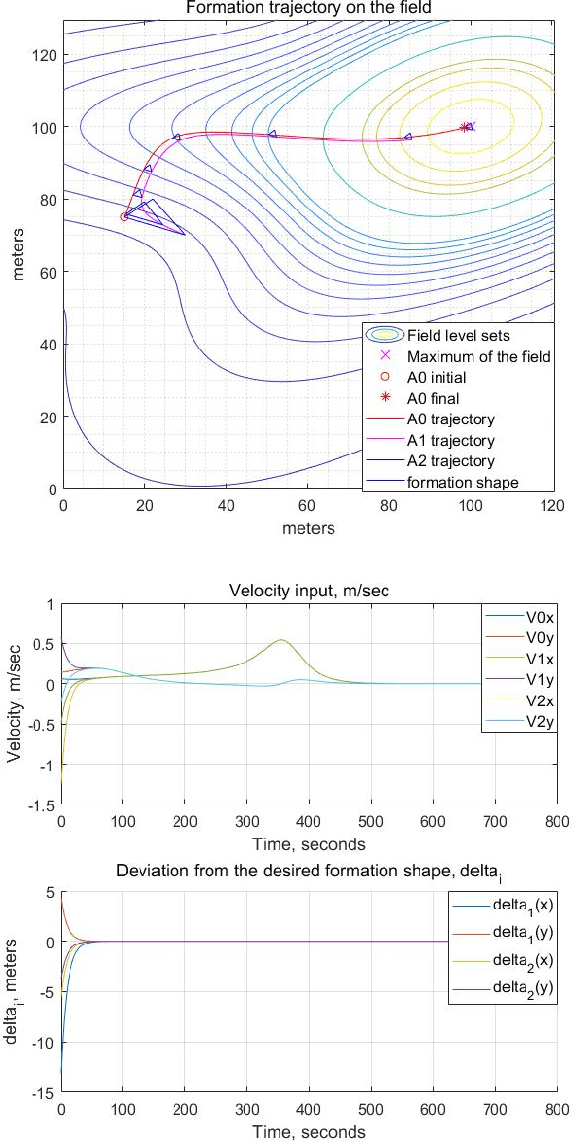
In this paper, a combined formation acquisition and cooperative extremum seeking control scheme is proposed for a team of three robots moving on a plane. The extremum seeking task is to find the maximizer of an unknown two-dimensional function on the plane. The function represents the signal strength field due to a source located at maximizer, and is assumed to be locally concave around maximizer and monotonically decreasing in distance to the source location. Taylor expansions of the field function at the location of a particular lead robot and the maximizer are used together with a gradient estimator based on signal strength measurements of the robots to design and analyze the proposed control scheme. The proposed scheme is proven to exponentially and simultaneously (i) acquire the specified geometric formation and (ii) drive the lead robot to a specified neighborhood disk around maximizer, whose radius depends on the specified desired formation size as well as the norm bounds of the Hessian of the field function. The performance of the proposed control scheme is evaluated using a set of simulation experiments.