 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Sensing Strategy: Multi-Modal, Multi-Robot Source Localization and Mapping in Real-World Settings with Fixed One-Way Switching
Jul 01, 2024This paper introduces a state-machine model for a multi-modal, multi-robot environmental sensing algorithm tailored to dynamic real-world settings. The algorithm uniquely combines two exploration strategies for gas source localization and mapping: (1) an initial exploration phase using multi-robot coverage path planning with variable formations for early gas field indication; and (2) a subsequent active sensing phase employing multi-robot swarms for precise field estimation. The state machine governs the transition between these two phases. During exploration, a coverage path maximizes the visited area while measuring gas concentration and estimating the initial gas field at predefined sample times. In the active sensing phase, mobile robots in a swarm collaborate to select the next measurement point, ensuring coordinated and efficient sensing. System validation involves hardware-in-the-loop experiments and real-time tests with a radio source emulating a gas field. The approach is benchmarked against state-of-the-art single-mode active sensing and gas source localization techniques. Evaluation highlights the multi-modal switching approach's ability to expedite convergence, navigate obstacles in dynamic environments, and significantly enhance gas source location accuracy. The findings show a 43% reduction in turnaround time, a 50% increase in estimation accuracy, and improved robustness of multi-robot environmental sensing in cluttered scenarios without collisions, surpassing the performance of conventional active sensing strategies.
Coverage Path Planning with Budget Constraints for Multiple Unmanned Ground Vehicles
Jun 07, 2023



This paper proposes a state-machine model for a multi-modal, multi-robot environmental sensing algorithm. This multi-modal algorithm integrates two different exploration algorithms: (1) coverage path planning using variable formations and (2) collaborative active sensing using multi-robot swarms. The state machine provides the logic for when to switch between these different sensing algorithms. We evaluate the performance of the proposed approach on a gas source localisation and mapping task. We use hardware-in-the-loop experiments and real-time experiments with a radio source simulating a real gas field. We compare the proposed approach with a single-mode, state-of-the-art collaborative active sensing approach. Our results indicate that our multi-modal switching approach can converge more rapidly than single-mode active sensing.
Lightweight Monocular Depth Estimation with an Edge Guided Network
Sep 29, 2022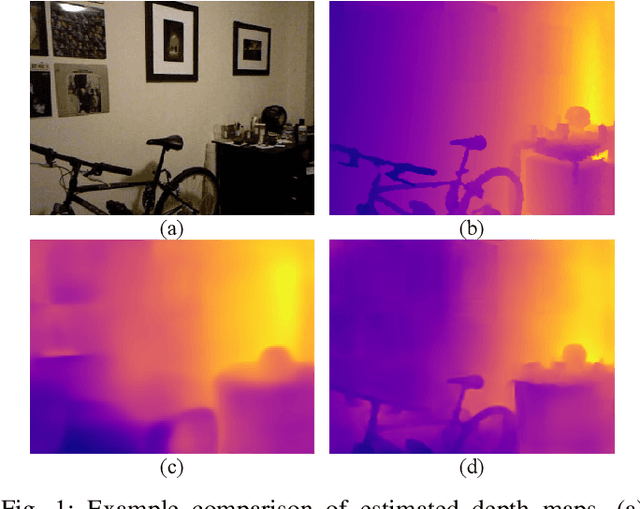
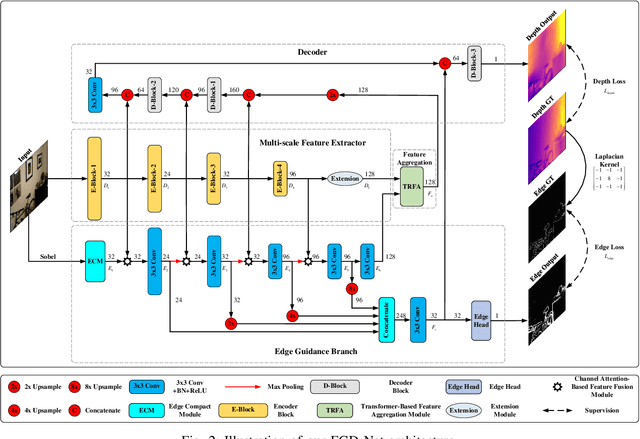
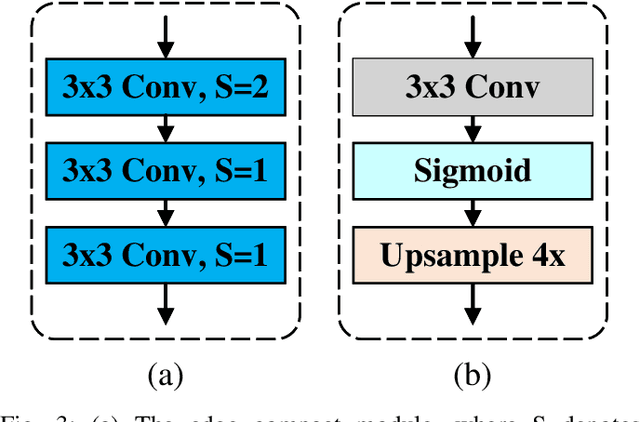
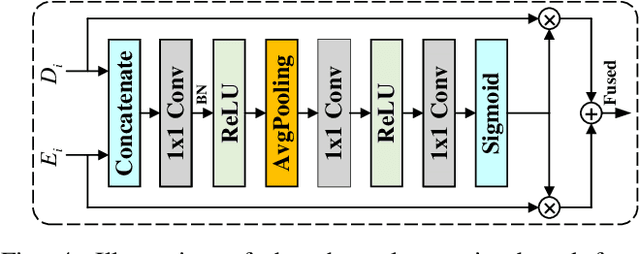
Monocular depth estimation is an important task that can be applied to many robotic applications. Existing methods focus on improving depth estimation accuracy via training increasingly deeper and wider networks, however these suffer from large computational complexity. Recent studies found that edge information are important cues for convolutional neural networks (CNNs) to estimate depth. Inspired by the above observations, we present a novel lightweight Edge Guided Depth Estimation Network (EGD-Net) in this study. In particular, we start out with a lightweight encoder-decoder architecture and embed an edge guidance branch which takes as input image gradients and multi-scale feature maps from the backbone to learn the edge attention features. In order to aggregate the context information and edge attention features, we design a transformer-based feature aggregation module (TRFA). TRFA captures the long-range dependencies between the context information and edge attention features through cross-attention mechanism. We perform extensive experiments on the NYU depth v2 dataset. Experimental results show that the proposed method runs about 96 fps on a Nvidia GTX 1080 GPU whilst achieving the state-of-the-art performance in terms of accuracy.
Robust Fuzzy Q-Learning-Based Strictly Negative Imaginary Tracking Controllers for the Uncertain Quadrotor Systems
Mar 26, 2022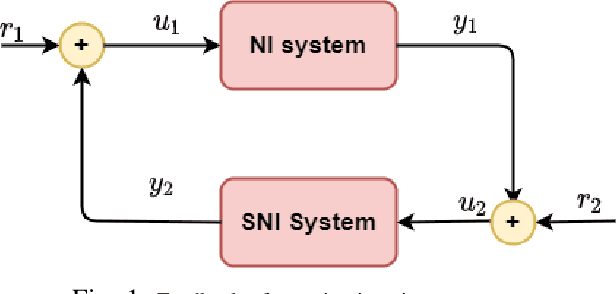
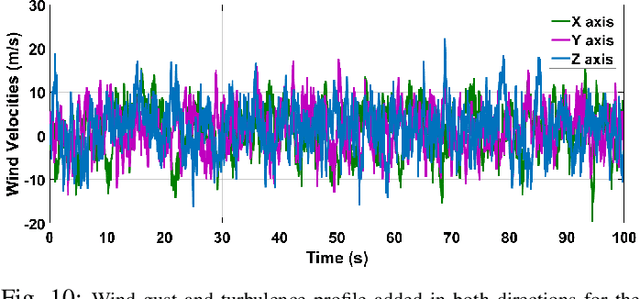
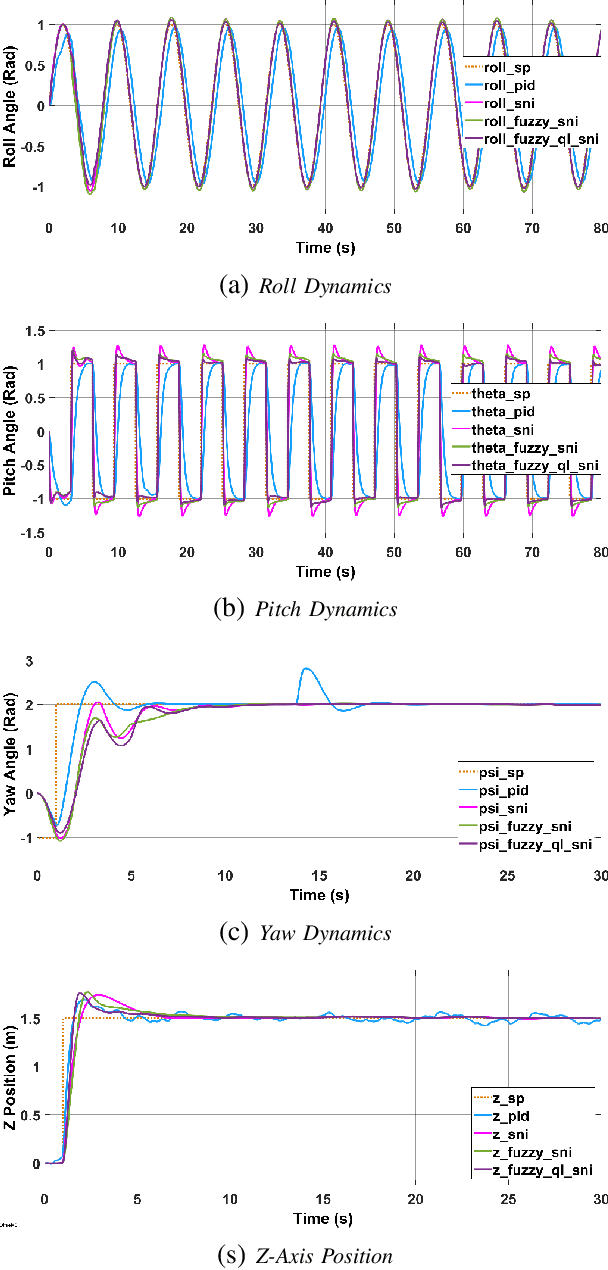
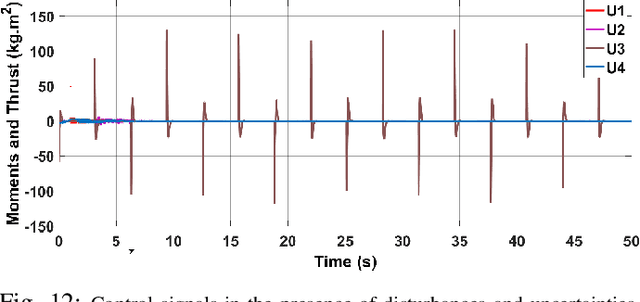
Quadrotors are one of the popular unmanned aerial vehicles (UAVs) due to their versatility and simple design. However, the tuning of gains for quadrotor flight controllers can be laborious, and accurately stable control of trajectories can be difficult to maintain under exogenous disturbances and uncertain system parameters. This paper introduces a novel robust and adaptive control synthesis methodology for a quadrotor robot's attitude and altitude stabilization. The developed method is based on the fuzzy reinforcement learning and Strictly Negative Imaginary (SNI) property. The first stage of our control approach is to transform a nonlinear quadrotor system into an equivalent Negative-Imaginary (NI) linear model by means of the feedback linearization (FL) technique. The second phase is to design a control scheme that adapts online the Strictly Negative Imaginary (SNI) controller gains via fuzzy Q-learning, inspired by biological learning. The proposed controller does not require any prior training. The performance of the designed controller is compared with that of a fixed-gain SNI controller, a fuzzy-SNI controller, and a conventional PID controller in a series of numerical simulations. Furthermore, the stability of the proposed controller and the adaptive laws are proofed using the NI theorem.
Robust Multi-Robot Coverage of Unknown Environments using a Distributed Robot Swarm
Nov 29, 2021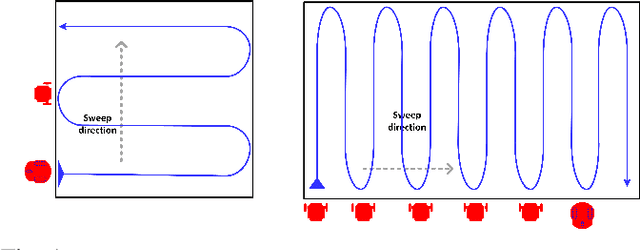
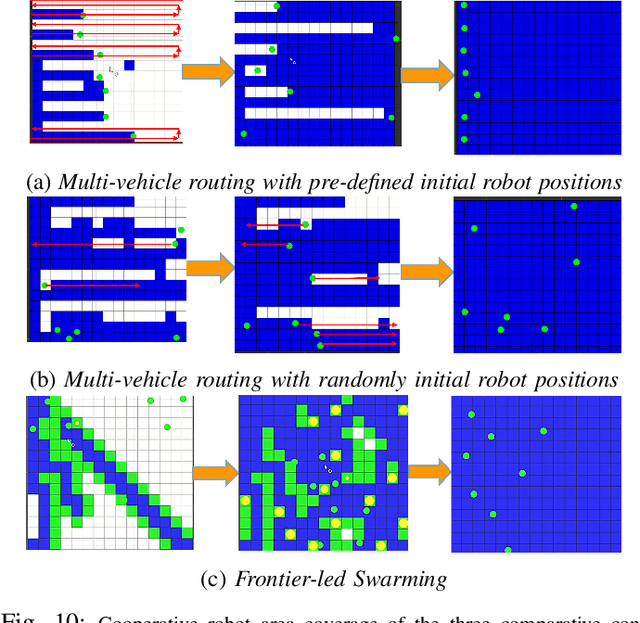
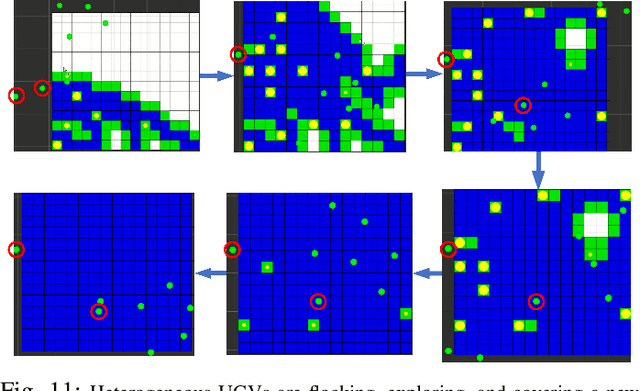
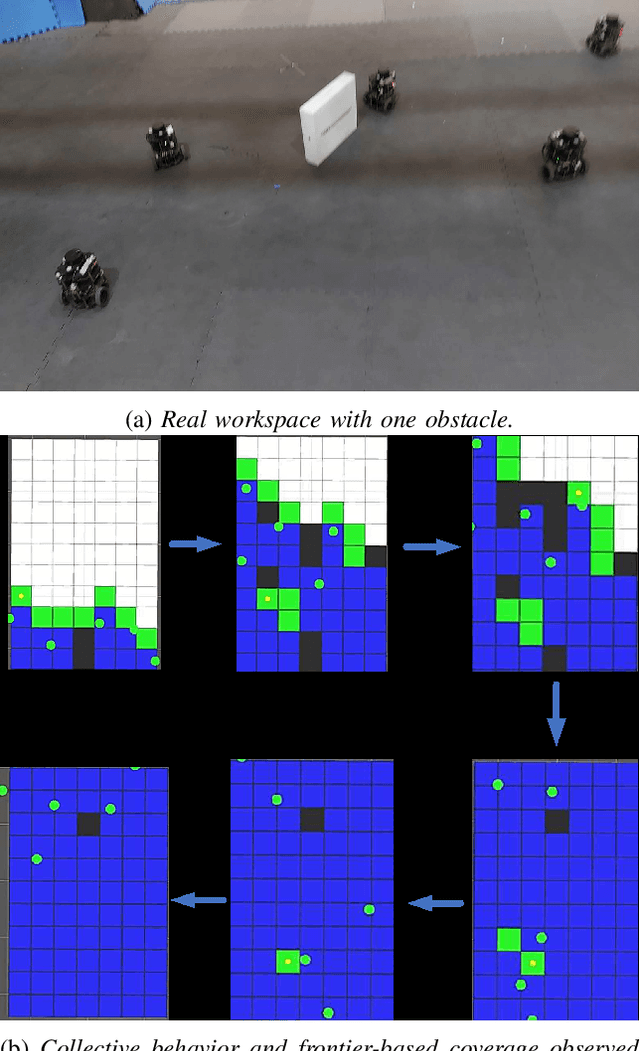
In mobile robotics, area exploration and coverage are critical capabilities. In most of the available research, a common assumption is global, long-range communication and centralised cooperation. This paper proposes a novel swarm-based coverage control algorithm that relaxes these assumptions. The algorithm combines two elements: swarm rules and frontier search algorithms. Inspired by natural systems in which large numbers of simple agents (e.g., schooling fish, flocking birds, swarming insects) perform complicated collective behaviors, the first element uses three simple rules to maintain a swarm formation in a distributed manner. The second element provides means to select promising regions to explore (and cover) using the minimization of a cost function involving the agent's relative position to the frontier cells and the frontier's size. We tested our approach's performance on both heterogeneous and homogeneous groups of mobile robots in different environments. We measure both coverage performance and swarm formation statistics that permit the group to maintain communication. Through a series of comparison experiments, we demonstrate the proposed strategy has superior performance over recently presented map coverage methodologies and the conventional artificial potential field based on a percentage of cell-coverage, turnaround, and safe paths while maintaining a formation that permits short-range communication.
MobileXNet: An Efficient Convolutional Neural Network for Monocular Depth Estimation
Nov 24, 2021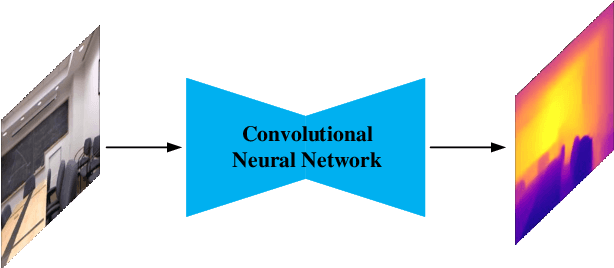
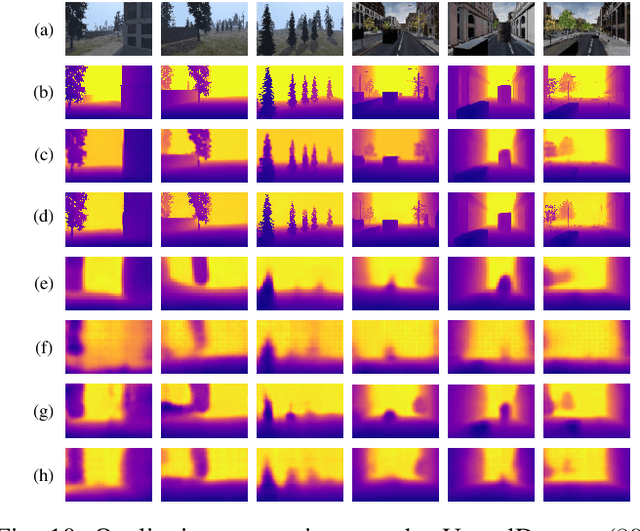
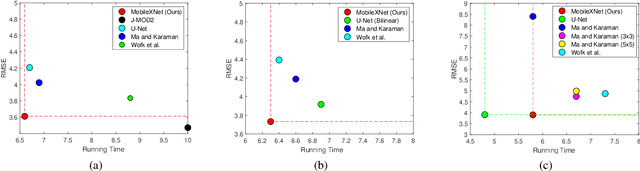
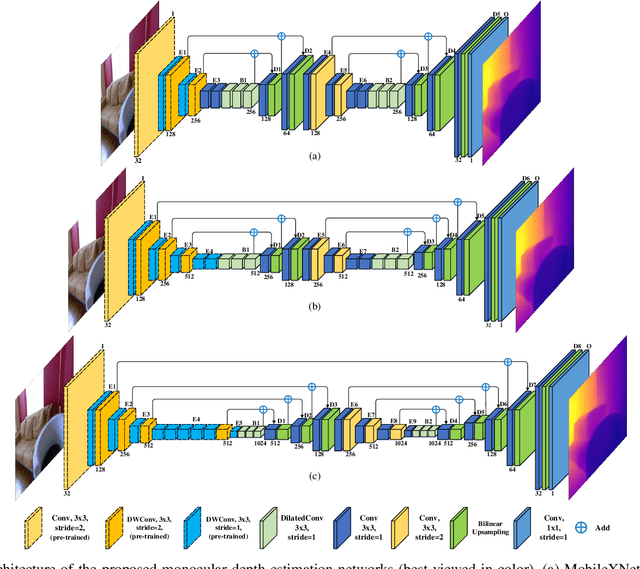
Depth is a vital piece of information for autonomous vehicles to perceive obstacles. Due to the relatively low price and small size of monocular cameras, depth estimation from a single RGB image has attracted great interest in the research community. In recent years, the application of Deep Neural Networks (DNNs) has significantly boosted the accuracy of monocular depth estimation (MDE). State-of-the-art methods are usually designed on top of complex and extremely deep network architectures, which require more computational resources and cannot run in real-time without using high-end GPUs. Although some researchers tried to accelerate the running speed, the accuracy of depth estimation is degraded because the compressed model does not represent images well. In addition, the inherent characteristic of the feature extractor used by the existing approaches results in severe spatial information loss in the produced feature maps, which also impairs the accuracy of depth estimation on small sized images. In this study, we are motivated to design a novel and efficient Convolutional Neural Network (CNN) that assembles two shallow encoder-decoder style subnetworks in succession to address these problems. In particular, we place our emphasis on the trade-off between the accuracy and speed of MDE. Extensive experiments have been conducted on the NYU depth v2, KITTI, Make3D and Unreal data sets. Compared with the state-of-the-art approaches which have an extremely deep and complex architecture, the proposed network not only achieves comparable performance but also runs at a much faster speed on a single, less powerful GPU.
Towards Real-Time Monocular Depth Estimation for Robotics: A Survey
Nov 16, 2021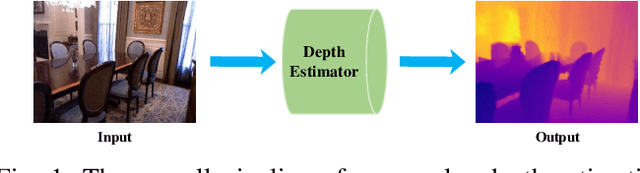
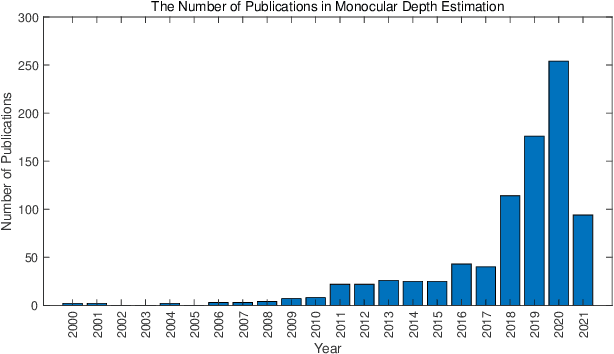


As an essential component for many autonomous driving and robotic activities such as ego-motion estimation, obstacle avoidance and scene understanding, monocular depth estimation (MDE) has attracted great attention from the computer vision and robotics communities. Over the past decades, a large number of methods have been developed. To the best of our knowledge, however, there is not a comprehensive survey of MDE. This paper aims to bridge this gap by reviewing 197 relevant articles published between 1970 and 2021. In particular, we provide a comprehensive survey of MDE covering various methods, introduce the popular performance evaluation metrics and summarize publically available datasets. We also summarize available open-source implementations of some representative methods and compare their performances. Furthermore, we review the application of MDE in some important robotic tasks. Finally, we conclude this paper by presenting some promising directions for future research. This survey is expected to assist readers to navigate this research field.
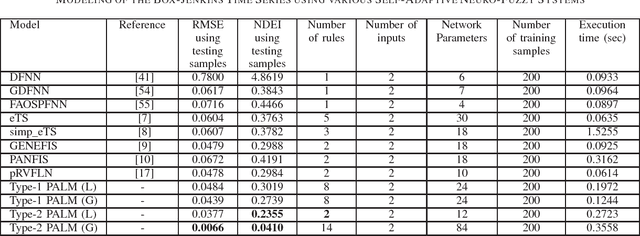
PAC: A Novel Self-Adaptive Neuro-Fuzzy Controller for Micro Aerial Vehicles
Nov 09, 2018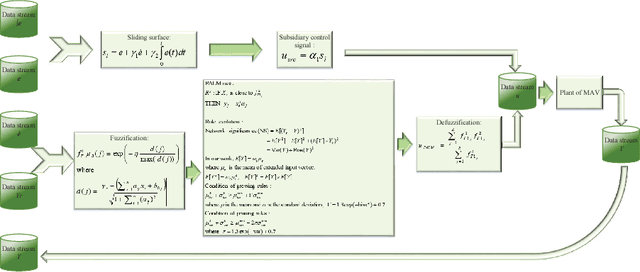
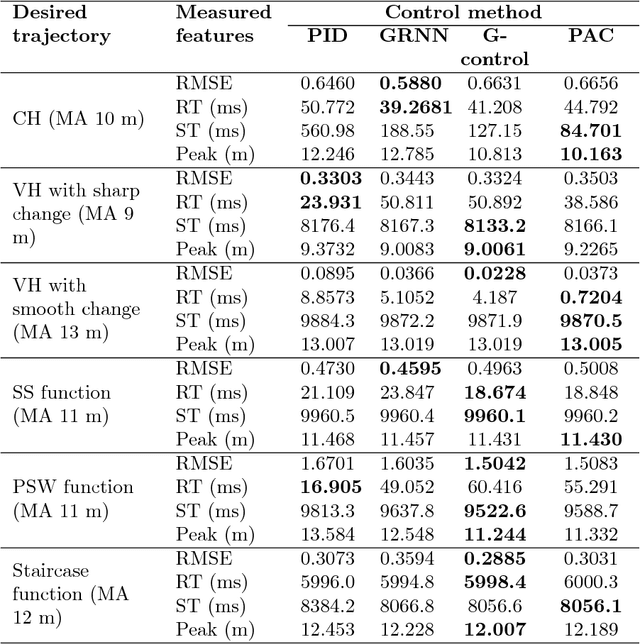
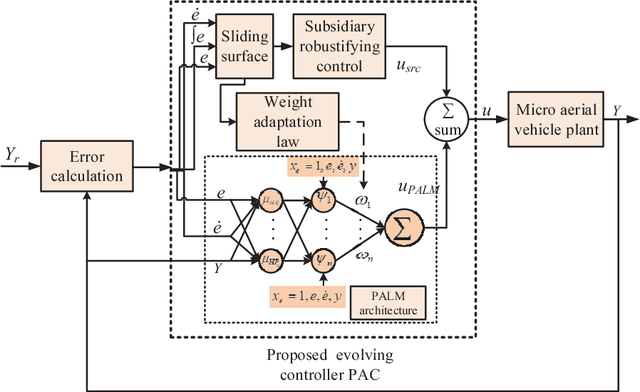
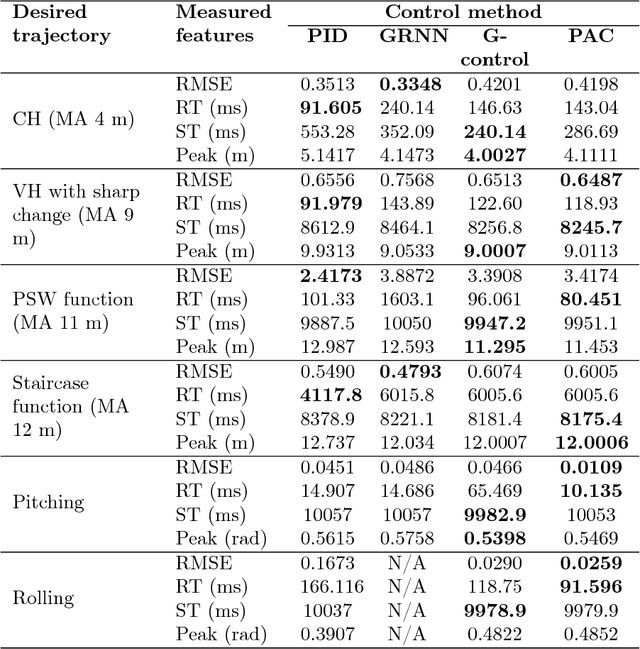
There exists an increasing demand of a flexible and computationally efficient controller for micro aerial vehicles (MAVs) due to a high degree of environmental perturbations. In this work, an evolving neuro-fuzzy controller namely Parsimonious Controller (PAC) is proposed and features less network parameters than conventional approaches due to the absence of rule premise parameters. PAC is built upon a recently developed evolving neuro-fuzzy system known as parsimonious learning machine (PALM) and adopts new rule growing and pruning modules derived from the approximation of bias and variance. These methods has no reliance on user-defined thresholds, thereby increasing its autonomy for the real-time deployment. PAC adapts the consequent parameters with the sliding mode control (SMC) theory in the single-pass fashion. The stability of our PAC is proven utilizing the Lyapunov stability analysis. Lastly, the controller's efficacy is evaluated by observing various trajectory tracking performance from a bio-inspired flapping wing micro aerial vehicle (BI-FWMAV) and a rotary wing micro aerial vehicle called hexacopter. Furthermore, it is compared against three distinctive controller. Our PAC outperforms the linear PID controller and generalized regression neural network (GRNN) based nonlinear adaptive controller. Compared to its predecessor, G-controller, the tracking accuracy is comparable but the PAC incurs significantly less parameters to attain similar or better performance than the G-controller.
PALM: An Incremental Construction of Hyperplanes for Data Stream Regression
Aug 28, 2018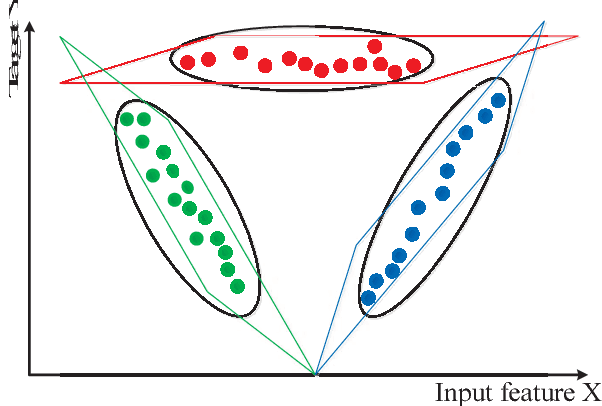
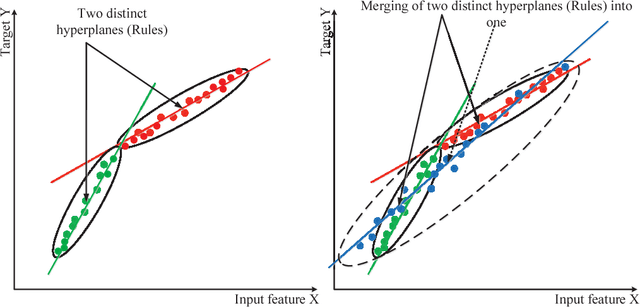

Data stream has been the underlying challenge in the age of big data because it calls for real-time data processing with the absence of a retraining process and/or an iterative learning approach. In realm of fuzzy system community, data stream is handled by algorithmic development of self-adaptive neurofuzzy systems (SANFS) characterized by the single-pass learning mode and the open structure property which enables effective handling of fast and rapidly changing natures of data streams. The underlying bottleneck of SANFSs lies in its design principle which involves a high number of free parameters (rule premise and rule consequent) to be adapted in the training process. This figure can even double in the case of type-2 fuzzy system. In this work, a novel SANFS, namely parsimonious learning machine (PALM), is proposed. PALM features utilization of a new type of fuzzy rule based on the concept of hyperplane clustering which significantly reduces the number of network parameters because it has no rule premise parameters. PALM is proposed in both type-1 and type-2 fuzzy systems where all of which characterize a fully dynamic rule-based system. That is, it is capable of automatically generating, merging and tuning the hyperplane-based fuzzy rule in the single pass manner. Moreover, an extension of PALM, namely recurrent PALM (rPALM), is proposed and adopts the concept of teacher-forcing mechanism in the deep learning literature. The efficacy of PALM has been evaluated through numerical study with six real-world and synthetic data streams from public database and our own real-world project of autonomous vehicles. The proposed model showcases significant improvements in terms of computational complexity and number of required parameters against several renowned SANFSs, while attaining comparable and often better predictive accuracy.
Development of a Sliding Mode Control Based Adaptive Fuzzy Controller for a Flapping Flight
Aug 18, 2018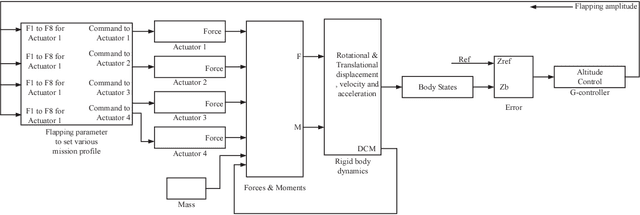
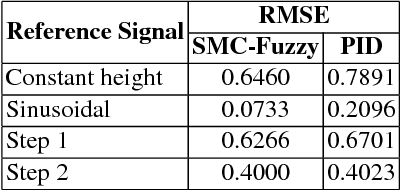
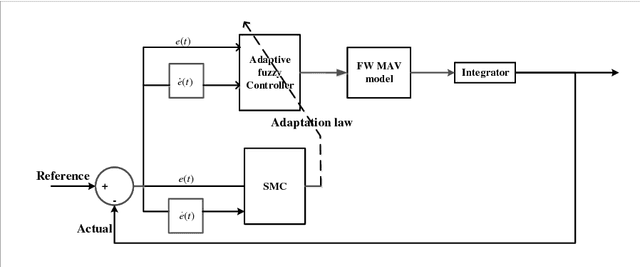
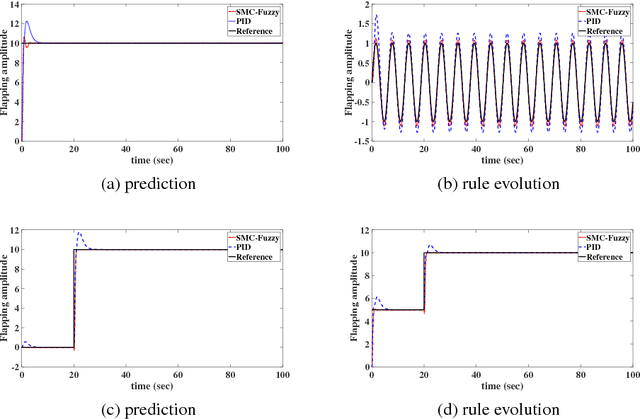
Controlling of a flapping flight is one of the recent research topics related to the field of Flapping Wing Micro Air Vehicle (FW MAV). In this work, an adaptive control system for a four-wing FW MAV is proposed, inspired by its advanced features like quick flight, vertical take-off and landing, hovering, and fast turn, and enhanced manoeuvrability. Sliding Mode Control (SMC) theory has been used to develop the adaptation laws for the proposed adaptive fuzzy controller. The SMC theory confirms the closed-loop stability of the controller. The controller is utilized to control the altitude of the FW MAV, that can adapt to environmental disturbances by tuning the antecedent and consequent parameters of the fuzzy system.