 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAC: A Novel Self-Adaptive Neuro-Fuzzy Controller for Micro Aerial Vehicles
Paper and Code
Nov 09, 2018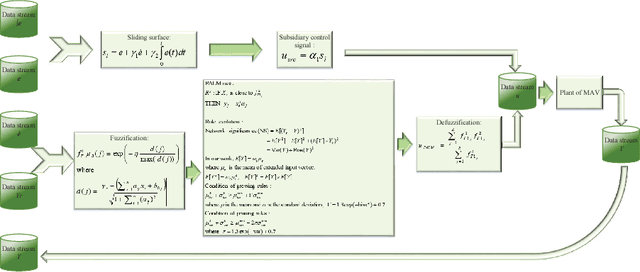
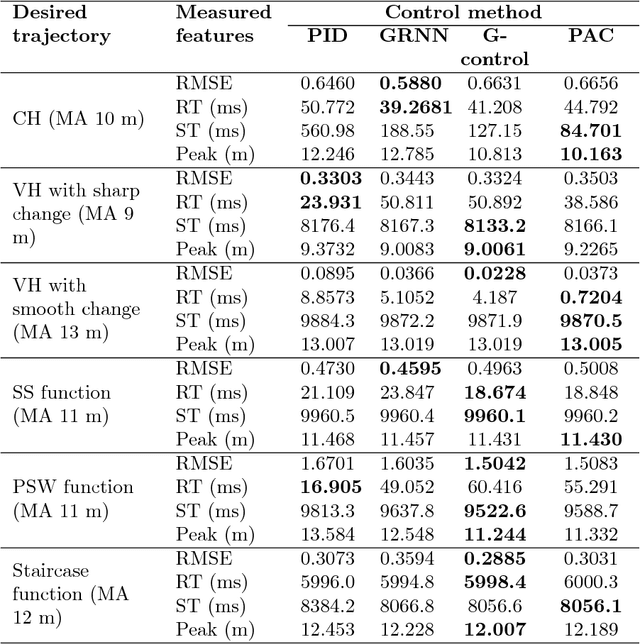
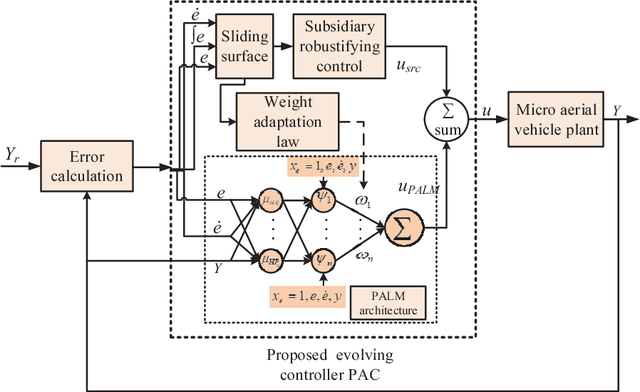
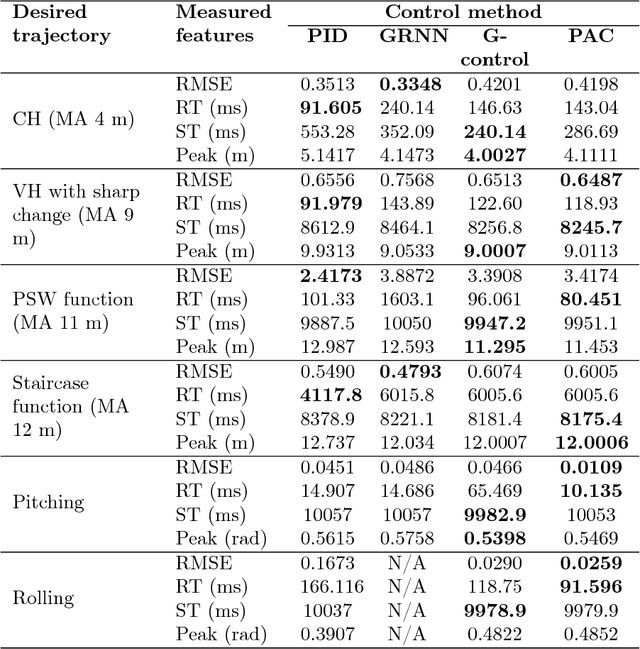
There exists an increasing demand of a flexible and computationally efficient controller for micro aerial vehicles (MAVs) due to a high degree of environmental perturbations. In this work, an evolving neuro-fuzzy controller namely Parsimonious Controller (PAC) is proposed and features less network parameters than conventional approaches due to the absence of rule premise parameters. PAC is built upon a recently developed evolving neuro-fuzzy system known as parsimonious learning machine (PALM) and adopts new rule growing and pruning modules derived from the approximation of bias and variance. These methods has no reliance on user-defined thresholds, thereby increasing its autonomy for the real-time deployment. PAC adapts the consequent parameters with the sliding mode control (SMC) theory in the single-pass fashion. The stability of our PAC is proven utilizing the Lyapunov stability analysis. Lastly, the controller's efficacy is evaluated by observing various trajectory tracking performance from a bio-inspired flapping wing micro aerial vehicle (BI-FWMAV) and a rotary wing micro aerial vehicle called hexacopter. Furthermore, it is compared against three distinctive controller. Our PAC outperforms the linear PID controller and generalized regression neural network (GRNN) based nonlinear adaptive controller. Compared to its predecessor, G-controller, the tracking accuracy is comparable but the PAC incurs significantly less parameters to attain similar or better performance than the G-controller.