 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Fuzzy Q-Learning-Based Strictly Negative Imaginary Tracking Controllers for the Uncertain Quadrotor Systems
Mar 26, 2022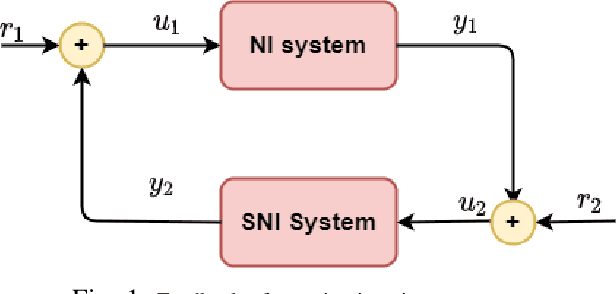
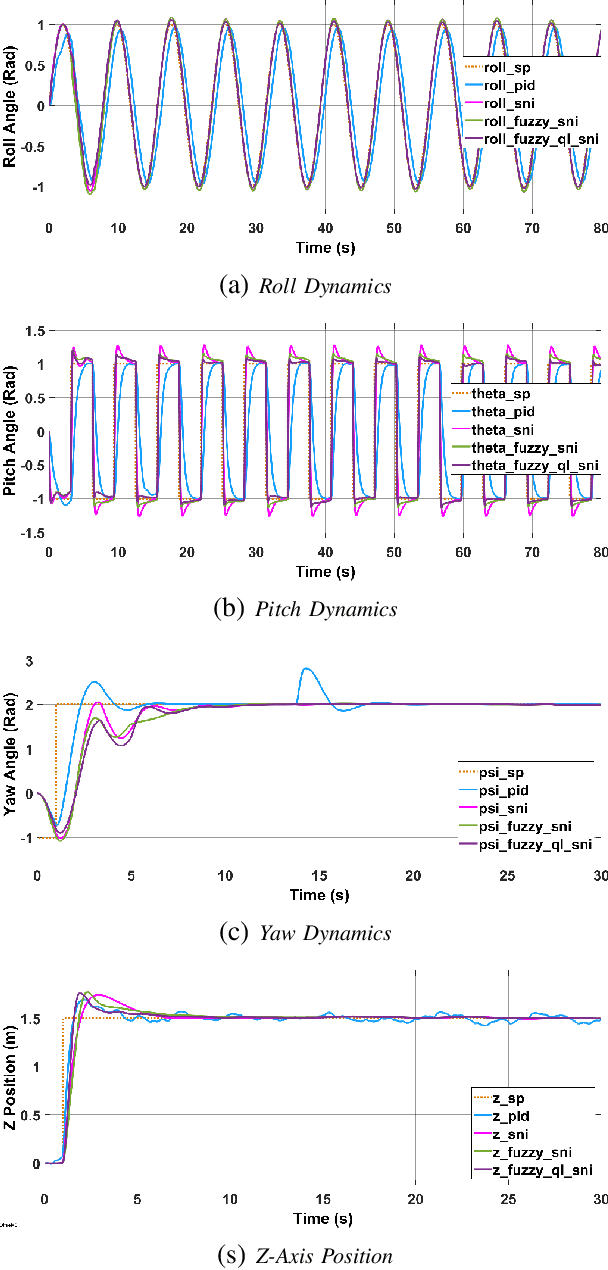
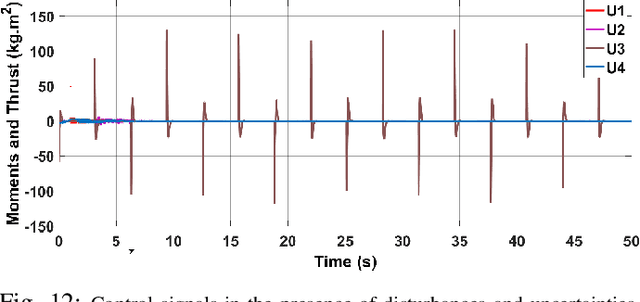
Quadrotors are one of the popular unmanned aerial vehicles (UAVs) due to their versatility and simple design. However, the tuning of gains for quadrotor flight controllers can be laborious, and accurately stable control of trajectories can be difficult to maintain under exogenous disturbances and uncertain system parameters. This paper introduces a novel robust and adaptive control synthesis methodology for a quadrotor robot's attitude and altitude stabilization. The developed method is based on the fuzzy reinforcement learning and Strictly Negative Imaginary (SNI) property. The first stage of our control approach is to transform a nonlinear quadrotor system into an equivalent Negative-Imaginary (NI) linear model by means of the feedback linearization (FL) technique. The second phase is to design a control scheme that adapts online the Strictly Negative Imaginary (SNI) controller gains via fuzzy Q-learning, inspired by biological learning. The proposed controller does not require any prior training. The performance of the designed controller is compared with that of a fixed-gain SNI controller, a fuzzy-SNI controller, and a conventional PID controller in a series of numerical simulations. Furthermore, the stability of the proposed controller and the adaptive laws are proofed using the NI theorem.