 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResponse Component Analysis for Sea State Estimation Using Artificial Neural Networks and Vessel Response Spectral Data
May 05, 2022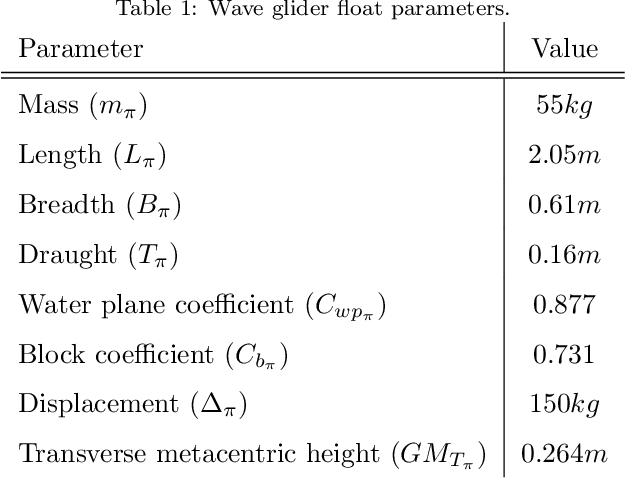
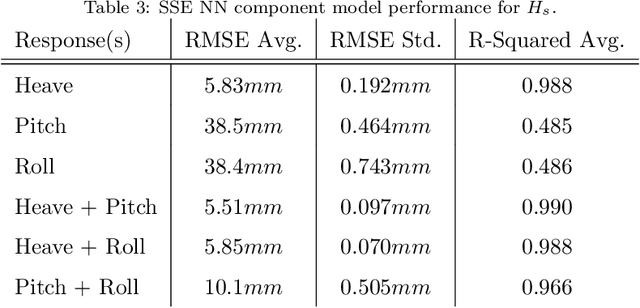
The use of the `ship as a wave buoy analogy' (SAWB) provides a novel means to estimate sea states, where relationships are established between causal wave properties and vessel motion response information. This study focuses on a model-free machine learning approach to SAWB-based sea state estimation (SSE), using neural networks (NNs) to map vessel response spectral data to statistical wave properties. Results showed a strong correlation between heave responses and significant wave height estimates, whilst the accuracy of mean wave period and wave heading predictions were observed to improve considerably when data from multiple vessel degrees of freedom (DOFs) was utilized. Overall, 3-DOF (heave, pitch and roll) NNs for SSE were shown to perform well when compared to existing SSE approaches that use similar simulation setups. Given the information-dense statistical representation of vessel motion responses in spectral form, as well as the ability of NNs to effectively model complex relationships between variables, the designed SSE method shows promise for future adaptation to mobile SSE systems using the SAWB approach.
A Comprehensive Review of Shepherding as a Bio-inspired Swarm-Robotics Guidance Approach
Dec 18, 2019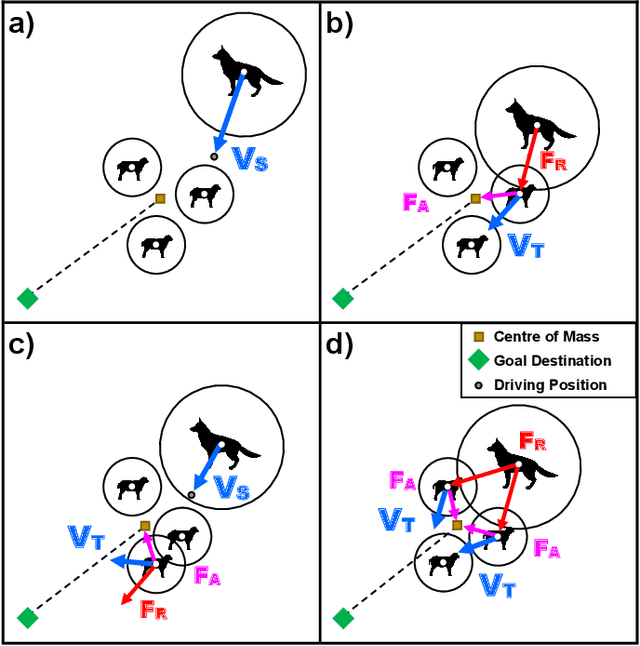
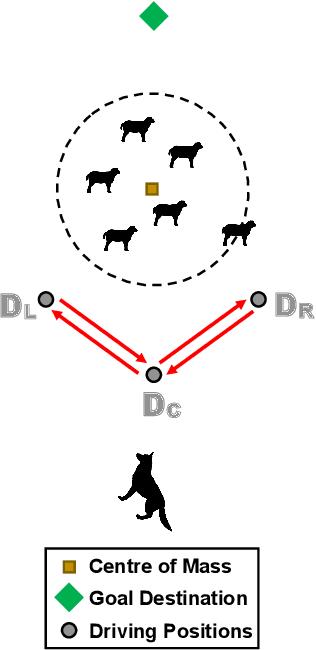
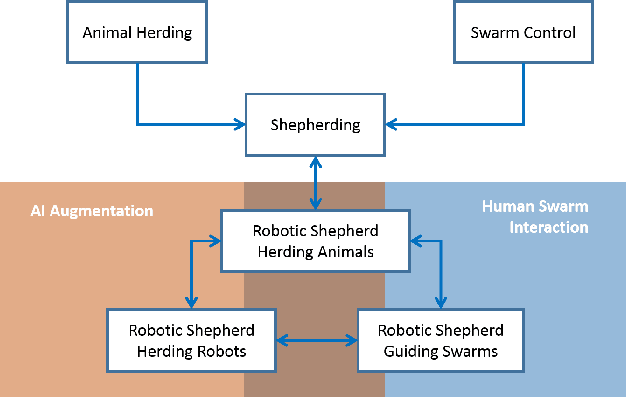
The simultaneous control of multiple coordinated robotic agents represents an elaborate problem. If solved, however, the interaction between the agents can lead to solutions to sophisticated problems. The concept of swarming, inspired by nature, can be described as the emergence of complex system-level behaviors from the interactions of relatively elementary agents. Due to the effectiveness of solutions found in nature, bio-inspired swarming-based control techniques are receiving a lot of attention in robotics. One method, known as swarm shepherding, is founded on the sheep herding behavior exhibited by sheepdogs, where a swarm of relatively simple agents are governed by a shepherd (or shepherds) which is responsible for high-level guidance and planning. Many studies have been conducted on shepherding as a control technique, ranging from the replication of sheep herding via simulation, to the control of uninhabited vehicles and robots for a variety of applications. We present a comprehensive review of the literature on swarm shepherding to reveal the advantages and potential of the approach to be applied to a plethora of robotic systems in the future.