 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Flow Q-Learning: Offline Safe Reinforcement Learning with Reachability-Based Flow Policies
Mar 16, 2026Offline safe reinforcement learning (RL) seeks reward-maximizing policies from static datasets under strict safety constraints. Existing methods often rely on soft expected-cost objectives or iterative generative inference, which can be insufficient for safety-critical real-time control. We propose Safe Flow Q-Learning (SafeFQL), which extends FQL to safe offline RL by combining a Hamilton--Jacobi reachability-inspired safety value function with an efficient one-step flow policy. SafeFQL learns the safety value via a self-consistency Bellman recursion, trains a flow policy by behavioral cloning, and distills it into a one-step actor for reward-maximizing safe action selection without rejection sampling at deployment. To account for finite-data approximation error in the learned safety boundary, we add a conformal prediction calibration step that adjusts the safety threshold and provides finite-sample probabilistic safety coverage. Empirically, SafeFQL trades modestly higher offline training cost for substantially lower inference latency than diffusion-style safe generative baselines, which is advantageous for real-time safety-critical deployment. Across boat navigation, and Safety Gymnasium MuJoCo tasks, SafeFQL matches or exceeds prior offline safe RL performance while substantially reducing constraint violations.
Epigraph-Guided Flow Matching for Safe and Performant Offline Reinforcement Learning
Feb 08, 2026Offline reinforcement learning (RL) provides a compelling paradigm for training autonomous systems without the risks of online exploration, particularly in safety-critical domains. However, jointly achieving strong safety and performance from fixed datasets remains challenging. Existing safe offline RL methods often rely on soft constraints that allow violations, introduce excessive conservatism, or struggle to balance safety, reward optimization, and adherence to the data distribution. To address this, we propose Epigraph-Guided Flow Matching (EpiFlow), a framework that formulates safe offline RL as a state-constrained optimal control problem to co-optimize safety and performance. We learn a feasibility value function derived from an epigraph reformulation of the optimal control problem, thereby avoiding the decoupled objectives or post-hoc filtering common in prior work. Policies are synthesized by reweighting the behavior distribution based on this epigraph value function and fitting a generative policy via flow matching, enabling efficient, distribution-consistent sampling. Across various safety-critical tasks, including Safety-Gymnasium benchmarks, EpiFlow achieves competitive returns with near-zero empirical safety violations, demonstrating the effectiveness of epigraph-guided policy synthesis.
V-OCBF: Learning Safety Filters from Offline Data via Value-Guided Offline Control Barrier Functions
Dec 11, 2025Ensuring safety in autonomous systems requires controllers that satisfy hard, state-wise constraints without relying on online interaction. While existing Safe Offline RL methods typically enforce soft expected-cost constraints, they do not guarantee forward invariance. Conversely, Control Barrier Functions (CBFs) provide rigorous safety guarantees but usually depend on expert-designed barrier functions or full knowledge of the system dynamics. We introduce Value-Guided Offline Control Barrier Functions (V-OCBF), a framework that learns a neural CBF entirely from offline demonstrations. Unlike prior approaches, V-OCBF does not assume access to the dynamics model; instead, it derives a recursive finite-difference barrier update, enabling model-free learning of a barrier that propagates safety information over time. Moreover, V-OCBF incorporates an expectile-based objective that avoids querying the barrier on out-of-distribution actions and restricts updates to the dataset-supported action set. The learned barrier is then used with a Quadratic Program (QP) formulation to synthesize real-time safe control. Across multiple case studies, V-OCBF yields substantially fewer safety violations than baseline methods while maintaining strong task performance, highlighting its scalability for offline synthesis of safety-critical controllers without online interaction or hand-engineered barriers.
Neural Control Barrier Functions from Physics Informed Neural Networks
Apr 15, 2025
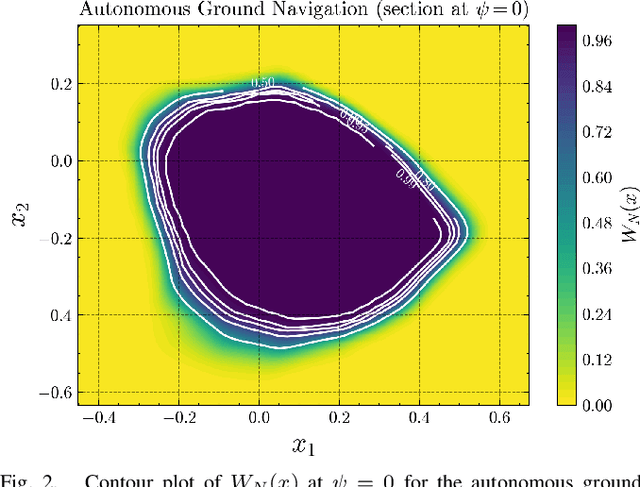

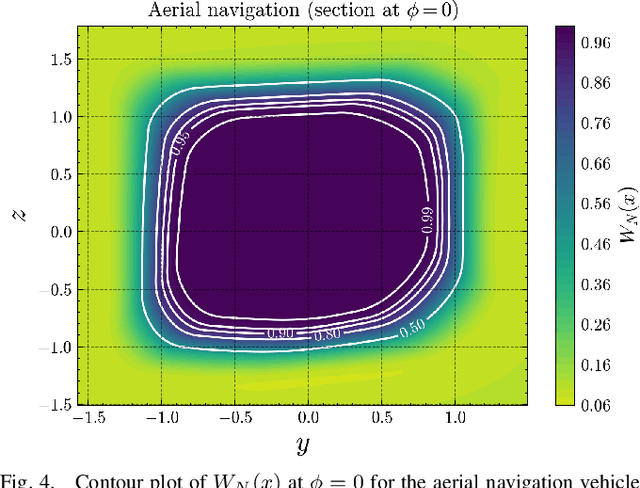
As autonomous systems become increasingly prevalent in daily life, ensuring their safety is paramount. Control Barrier Functions (CBFs) have emerged as an effective tool for guaranteeing safety; however, manually designing them for specific applications remains a significant challenge. With the advent of deep learning techniques, recent research has explored synthesizing CBFs using neural networks-commonly referred to as neural CBFs. This paper introduces a novel class of neural CBFs that leverages a physics-inspired neural network framework by incorporating Zubov's Partial Differential Equation (PDE) within the context of safety. This approach provides a scalable methodology for synthesizing neural CBFs applicable to high-dimensional systems. Furthermore, by utilizing reciprocal CBFs instead of zeroing CBFs, the proposed framework allows for the specification of flexible, user-defined safe regions. To validate the effectiveness of the approach, we present case studies on three different systems: an inverted pendulum, autonomous ground navigation, and aerial navigation in obstacle-laden environments.
GenOSIL: Generalized Optimal and Safe Robot Control using Parameter-Conditioned Imitation Learning
Mar 15, 2025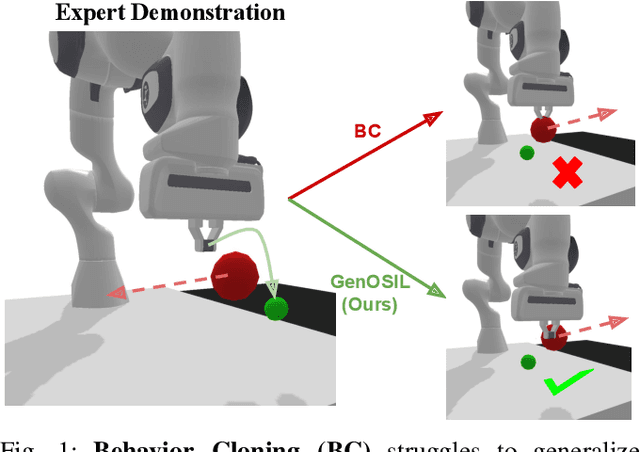
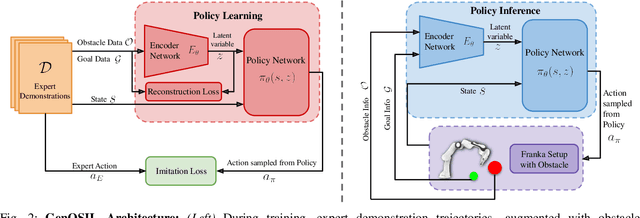
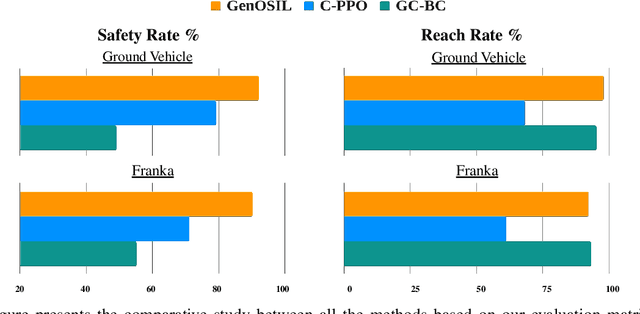
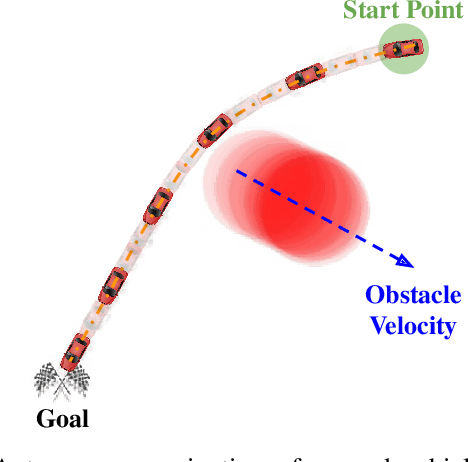
Ensuring safe and generalizable control remains a fundamental challenge in robotics, particularly when deploying imitation learning in dynamic environments. Traditional behavior cloning (BC) struggles to generalize beyond its training distribution, as it lacks an understanding of the safety critical reasoning behind expert demonstrations. To address this limitation, we propose GenOSIL, a novel imitation learning framework that explicitly incorporates environment parameters into policy learning via a structured latent representation. Unlike conventional methods that treat the environment as a black box, GenOSIL employs a variational autoencoder (VAE) to encode measurable safety parameters such as obstacle position, velocity, and geometry into a latent space that captures intrinsic correlations between expert behavior and environmental constraints. This enables the policy to infer the rationale behind expert trajectories rather than merely replicating them. We validate our approach on two robotic platforms an autonomous ground vehicle and a Franka Emika Panda manipulator demonstrating superior safety and goal reaching performance compared to baseline methods. The simulation and hardware videos can be viewed on the project webpage: https://mumukshtayal.github.io/GenOSIL/.
Real Time Safety of Fixed-wing UAVs using Collision Cone Control Barrier Functions
Jul 27, 2024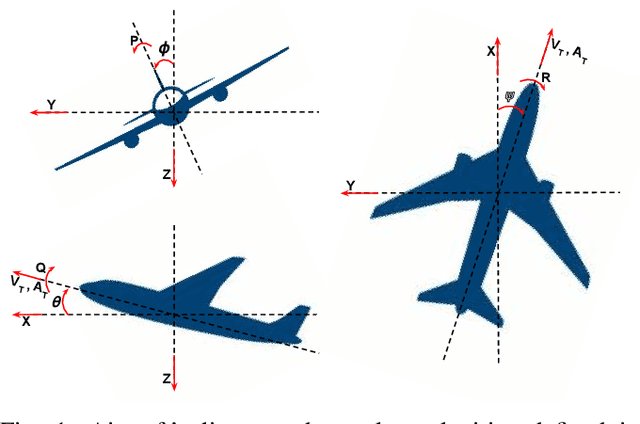
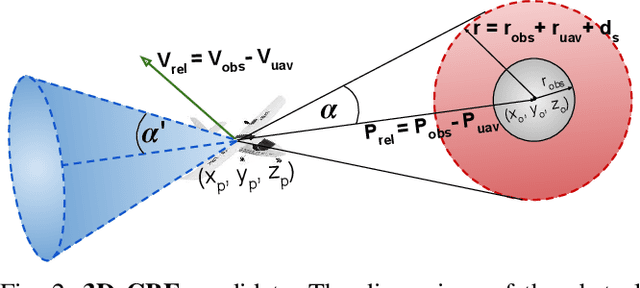
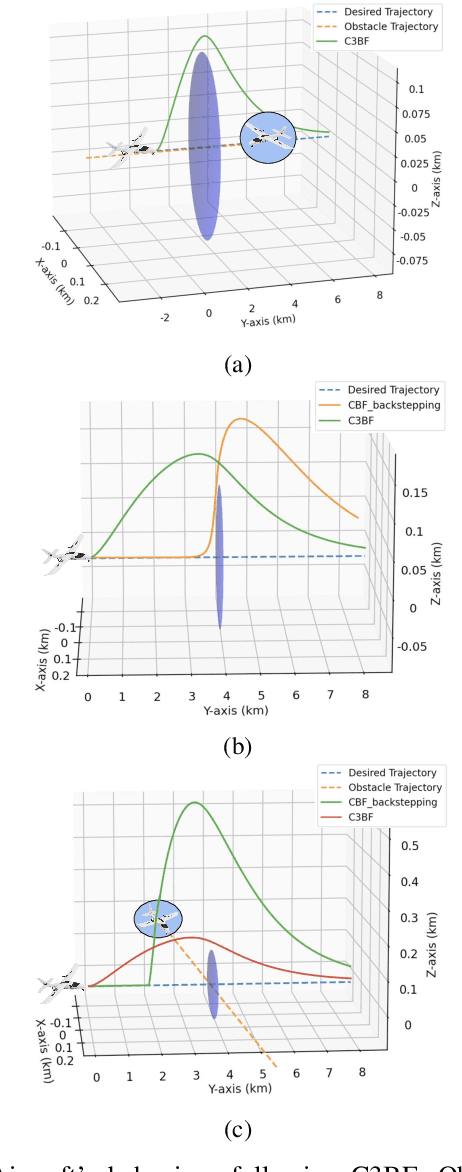
Fixed-wing UAVs have transformed the transportation system with their high flight speed and long endurance, yet their safe operation in increasingly cluttered environments depends heavily on effective collision avoidance techniques. This paper presents a novel method for safely navigating an aircraft along a desired route while avoiding moving obstacles. We utilize a class of control barrier functions (CBFs) based on collision cones to ensure the relative velocity between the aircraft and the obstacle consistently avoids a cone of vectors that might lead to a collision. By demonstrating that the proposed constraint is a valid CBF for the aircraft, we can leverage its real-time implementation via Quadratic Programs (QPs), termed the CBF-QPs. Validation includes simulating control law along trajectories, showing effectiveness in both static and moving obstacle scenarios.
BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains
Jul 07, 2024Locomotion on unknown terrains is essential for bipedal robots to handle novel real-world challenges, thus expanding their utility in disaster response and exploration. In this work, we introduce a lightweight framework that learns a single walking controller that yields locomotion on multiple terrains. We have designed a real-time robot controller based on diffusion models, which not only captures multiple behaviours with different velocities in a single policy but also generalizes well for unseen terrains. Our controller learns with offline data, which is better than online learning in aspects like scalability, simplicity in training scheme etc. We have designed and implemented a diffusion model-based policy controller in simulation on our custom-made Bipedal Robot model named Stoch BiRo. We have demonstrated its generalization capability and high frequency control step generation relative to typical generative models, which require huge onboarding compute.
Learning a Formally Verified Control Barrier Function in Stochastic Environment
Mar 28, 2024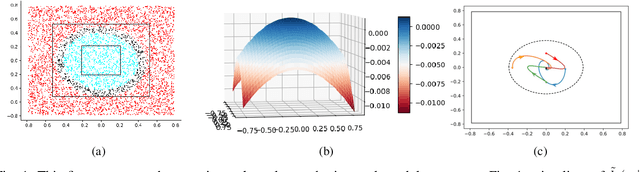
Safety is a fundamental requirement of control systems. Control Barrier Functions (CBFs) are proposed to ensure the safety of the control system by constructing safety filters or synthesizing control inputs. However, the safety guarantee and performance of safe controllers rely on the construction of valid CBFs. Inspired by universal approximatability, CBFs are represented by neural networks, known as neural CBFs (NCBFs). This paper presents an algorithm for synthesizing formally verified continuous-time neural Control Barrier Functions in stochastic environments in a single step. The proposed training process ensures efficacy across the entire state space with only a finite number of data points by constructing a sample-based learning framework for Stochastic Neural CBFs (SNCBFs). Our methodology eliminates the need for post hoc verification by enforcing Lipschitz bounds on the neural network, its Jacobian, and Hessian terms. We demonstrate the effectiveness of our approach through case studies on the inverted pendulum system and obstacle avoidance in autonomous driving, showcasing larger safe regions compared to baseline methods.
A Collision Cone Approach for Control Barrier Functions
Mar 11, 2024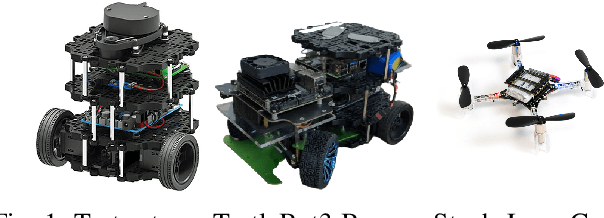
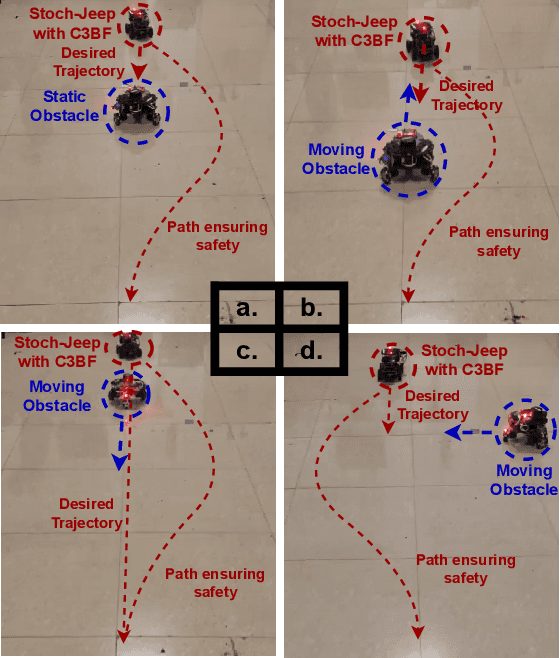
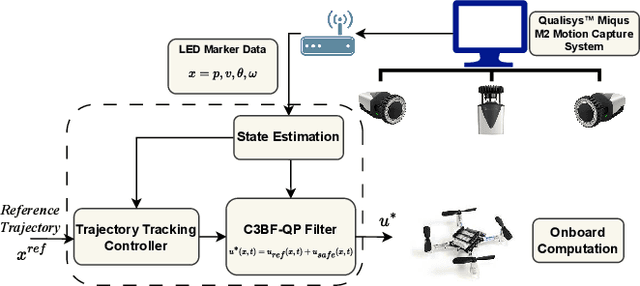
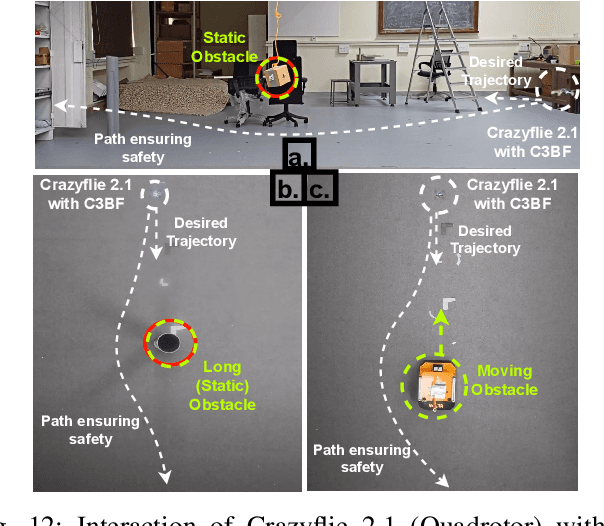
This work presents a unified approach for collision avoidance using Collision-Cone Control Barrier Functions (CBFs) in both ground (UGV) and aerial (UAV) unmanned vehicles. We propose a novel CBF formulation inspired by collision cones, to ensure safety by constraining the relative velocity between the vehicle and the obstacle to always point away from each other. The efficacy of this approach is demonstrated through simulations and hardware implementations on the TurtleBot, Stoch-Jeep, and Crazyflie 2.1 quadrotor robot, showcasing its effectiveness in avoiding collisions with dynamic obstacles in both ground and aerial settings. The real-time controller is developed using CBF Quadratic Programs (CBF-QPs). Comparative analysis with the state-of-the-art CBFs highlights the less conservative nature of the proposed approach. Overall, this research contributes to a novel control formation that can give a guarantee for collision avoidance in unmanned vehicles by modifying the control inputs from existing path-planning controllers.
Stoch BiRo: Design and Control of a low cost bipedal robot
Dec 11, 2023This paper introduces the Stoch BiRo, a cost-effective bipedal robot designed with a modular mechanical structure having point feet to navigate uneven and unfamiliar terrains. The robot employs proprioceptive actuation in abduction, hips, and knees, leveraging a Raspberry Pi4 for control. Overcoming computational limitations, a Learning-based Linear Policy controller manages balance and locomotion with only 3 degrees of freedom (DoF) per leg, distinct from the typical 5DoF in bipedal systems. Integrated within a modular control architecture, these controllers enable autonomous handling of unforeseen terrain disturbances without external sensors or prior environment knowledge. The robot's policies are trained and simulated using MuJoCo, transferring learned behaviors to the Stoch BiRo hardware for initial walking validations. This work highlights the Stoch BiRo's adaptability and cost-effectiveness in mechanical design, control strategies, and autonomous navigation, promising diverse applications in real-world robotics scenarios.