 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Collision Cone Approach for Control Barrier Functions
Mar 11, 2024
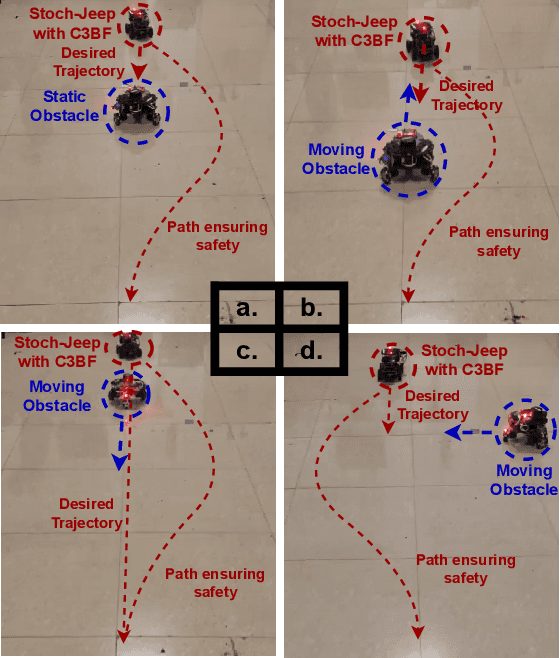
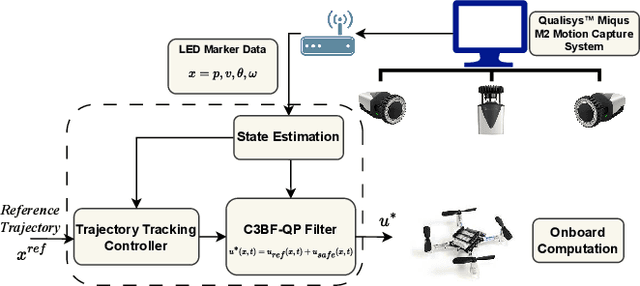
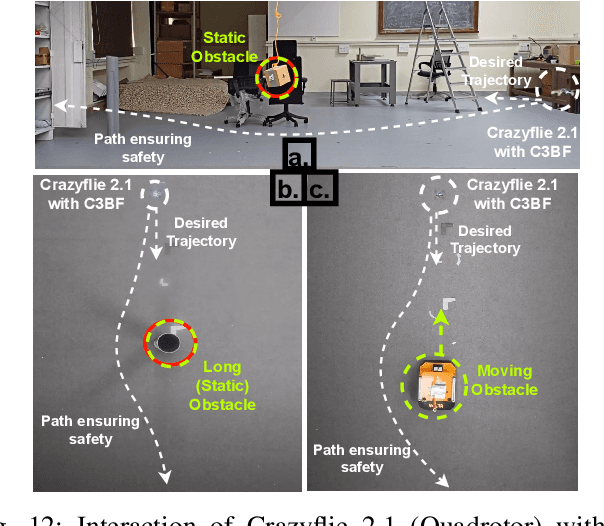
This work presents a unified approach for collision avoidance using Collision-Cone Control Barrier Functions (CBFs) in both ground (UGV) and aerial (UAV) unmanned vehicles. We propose a novel CBF formulation inspired by collision cones, to ensure safety by constraining the relative velocity between the vehicle and the obstacle to always point away from each other. The efficacy of this approach is demonstrated through simulations and hardware implementations on the TurtleBot, Stoch-Jeep, and Crazyflie 2.1 quadrotor robot, showcasing its effectiveness in avoiding collisions with dynamic obstacles in both ground and aerial settings. The real-time controller is developed using CBF Quadratic Programs (CBF-QPs). Comparative analysis with the state-of-the-art CBFs highlights the less conservative nature of the proposed approach. Overall, this research contributes to a novel control formation that can give a guarantee for collision avoidance in unmanned vehicles by modifying the control inputs from existing path-planning controllers.
Stoch BiRo: Design and Control of a low cost bipedal robot
Dec 11, 2023This paper introduces the Stoch BiRo, a cost-effective bipedal robot designed with a modular mechanical structure having point feet to navigate uneven and unfamiliar terrains. The robot employs proprioceptive actuation in abduction, hips, and knees, leveraging a Raspberry Pi4 for control. Overcoming computational limitations, a Learning-based Linear Policy controller manages balance and locomotion with only 3 degrees of freedom (DoF) per leg, distinct from the typical 5DoF in bipedal systems. Integrated within a modular control architecture, these controllers enable autonomous handling of unforeseen terrain disturbances without external sensors or prior environment knowledge. The robot's policies are trained and simulated using MuJoCo, transferring learned behaviors to the Stoch BiRo hardware for initial walking validations. This work highlights the Stoch BiRo's adaptability and cost-effectiveness in mechanical design, control strategies, and autonomous navigation, promising diverse applications in real-world robotics scenarios.
Collision Cone Control Barrier Functions: Experimental Validation on UGVs for Kinematic Obstacle Avoidance
Oct 16, 2023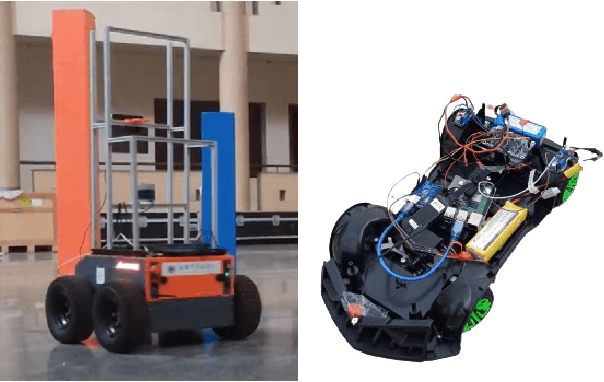
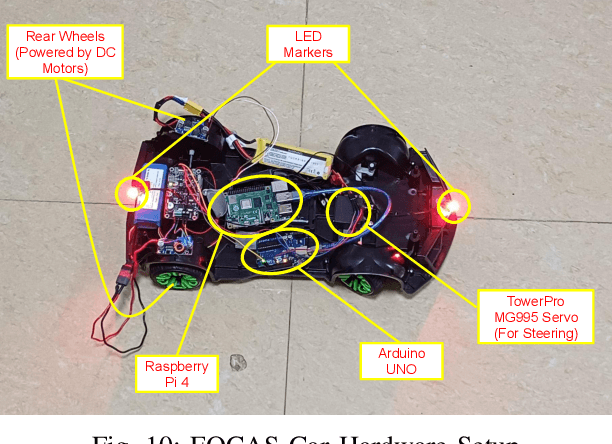
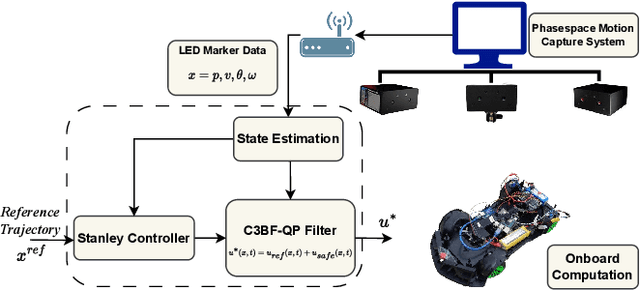
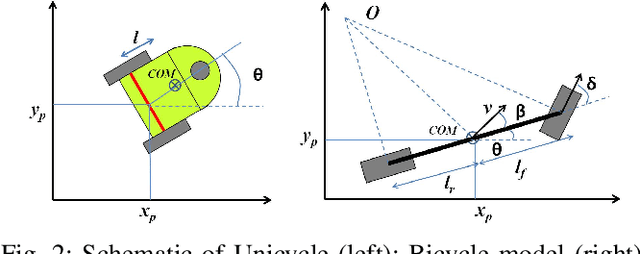
Autonomy advances have enabled robots in diverse environments and close human interaction, necessitating controllers with formal safety guarantees. This paper introduces an experimental platform designed for the validation and demonstration of a novel class of Control Barrier Functions (CBFs) tailored for Unmanned Ground Vehicles (UGVs) to proactively prevent collisions with kinematic obstacles by integrating the concept of collision cones. While existing CBF formulations excel with static obstacles, extensions to torque/acceleration-controlled unicycle and bicycle models have seen limited success. Conventional CBF applications in nonholonomic UGV models have demonstrated control conservatism, particularly in scenarios where steering/thrust control was deemed infeasible. Drawing inspiration from collision cones in path planning, we present a pioneering CBF formulation ensuring theoretical safety guarantees for both unicycle and bicycle models. The core premise revolves around aligning the obstacle's velocity away from the vehicle, establishing a constraint to perpetually avoid vectors directed towards it. This control methodology is rigorously validated through simulations and experimental verification on the Copernicus mobile robot (Unicycle Model) and FOCAS-Car (Bicycle Model).