 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Chain-Driven, Sandwich-Legged Quadruped Robot: Design and Experimental Analysis
Mar 18, 2025



This paper introduces a chain-driven, sandwich-legged, mid-size quadruped robot designed as an accessible research platform. The design prioritizes enhanced locomotion capabilities, improved reliability and safety of the actuation system, and simplified, cost-effective manufacturing processes. Locomotion performance is optimized through a sandwiched leg design and a dual-motor configuration, reducing leg inertia for agile movements. Reliability and safety are achieved by integrating robust cable strain reliefs, efficient heat sinks for motor thermal management, and mechanical limits to restrict leg motion. Simplified design considerations include a quasi-direct drive (QDD) actuator and the adoption of low-cost fabrication techniques, such as laser cutting and 3D printing, to minimize cost and ensure rapid prototyping. The robot weighs approximately 25 kg and is developed at a cost under \$8000, making it a scalable and affordable solution for robotics research. Experimental validations demonstrate the platform's capability to execute trot and crawl gaits on flat terrain and slopes, highlighting its potential as a versatile and reliable quadruped research platform.
A Collision Cone Approach for Control Barrier Functions
Mar 11, 2024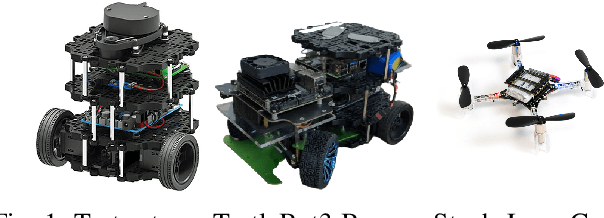
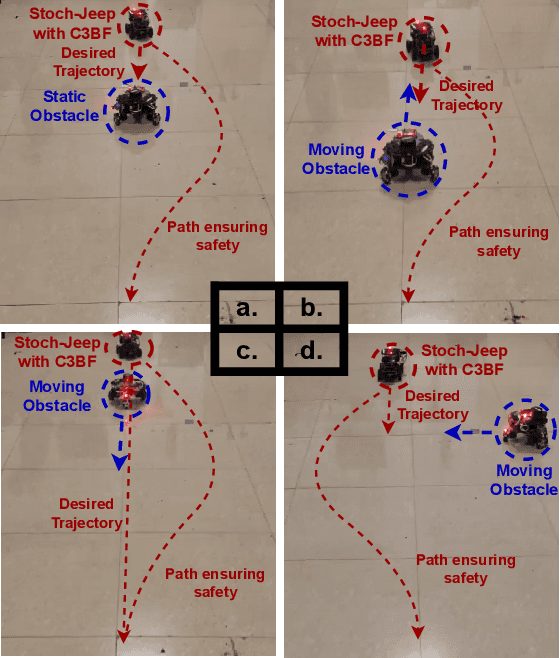
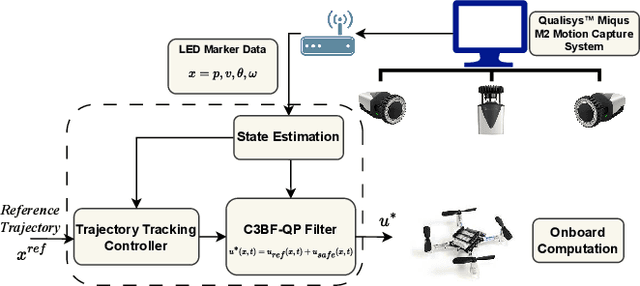
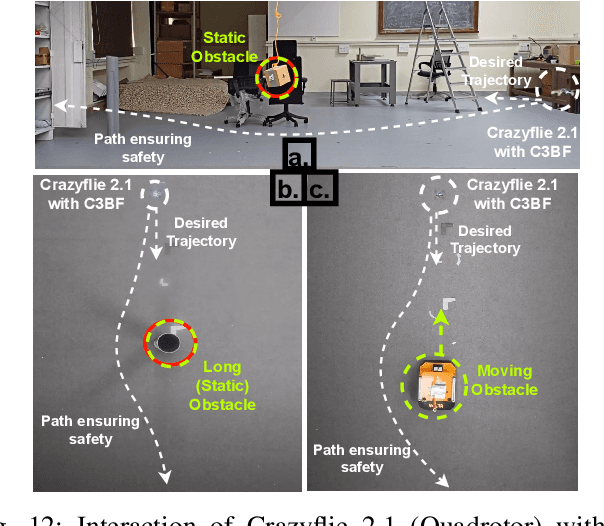
This work presents a unified approach for collision avoidance using Collision-Cone Control Barrier Functions (CBFs) in both ground (UGV) and aerial (UAV) unmanned vehicles. We propose a novel CBF formulation inspired by collision cones, to ensure safety by constraining the relative velocity between the vehicle and the obstacle to always point away from each other. The efficacy of this approach is demonstrated through simulations and hardware implementations on the TurtleBot, Stoch-Jeep, and Crazyflie 2.1 quadrotor robot, showcasing its effectiveness in avoiding collisions with dynamic obstacles in both ground and aerial settings. The real-time controller is developed using CBF Quadratic Programs (CBF-QPs). Comparative analysis with the state-of-the-art CBFs highlights the less conservative nature of the proposed approach. Overall, this research contributes to a novel control formation that can give a guarantee for collision avoidance in unmanned vehicles by modifying the control inputs from existing path-planning controllers.
Collision Cone Control Barrier Functions: Experimental Validation on UGVs for Kinematic Obstacle Avoidance
Oct 16, 2023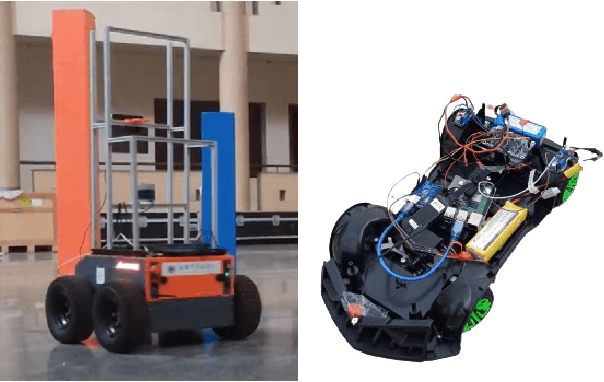
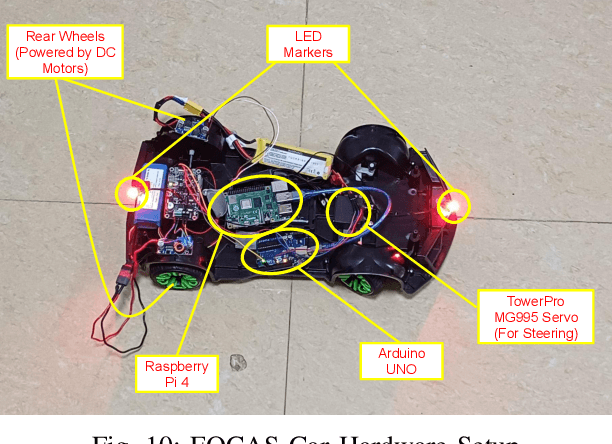
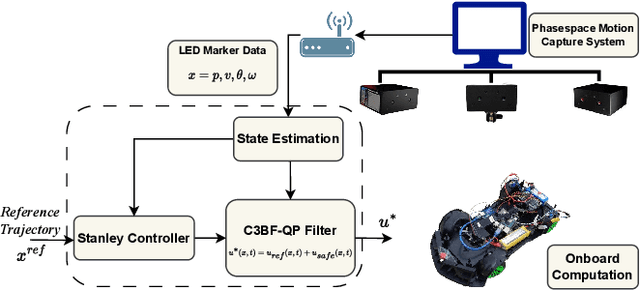
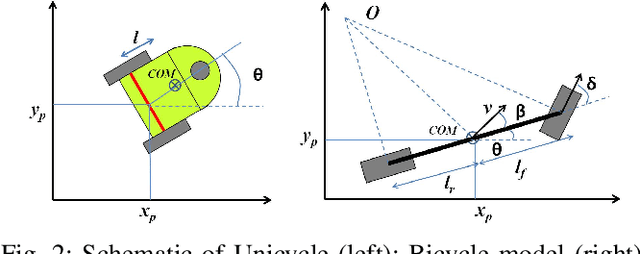
Autonomy advances have enabled robots in diverse environments and close human interaction, necessitating controllers with formal safety guarantees. This paper introduces an experimental platform designed for the validation and demonstration of a novel class of Control Barrier Functions (CBFs) tailored for Unmanned Ground Vehicles (UGVs) to proactively prevent collisions with kinematic obstacles by integrating the concept of collision cones. While existing CBF formulations excel with static obstacles, extensions to torque/acceleration-controlled unicycle and bicycle models have seen limited success. Conventional CBF applications in nonholonomic UGV models have demonstrated control conservatism, particularly in scenarios where steering/thrust control was deemed infeasible. Drawing inspiration from collision cones in path planning, we present a pioneering CBF formulation ensuring theoretical safety guarantees for both unicycle and bicycle models. The core premise revolves around aligning the obstacle's velocity away from the vehicle, establishing a constraint to perpetually avoid vectors directed towards it. This control methodology is rigorously validated through simulations and experimental verification on the Copernicus mobile robot (Unicycle Model) and FOCAS-Car (Bicycle Model).
Control Barrier Functions in UGVs for Kinematic Obstacle Avoidance: A Collision Cone Approach
Sep 23, 2022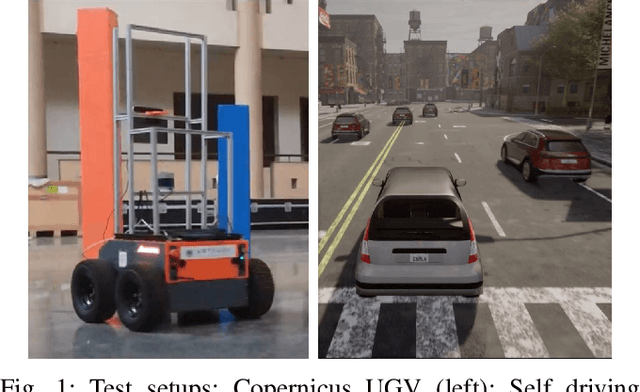
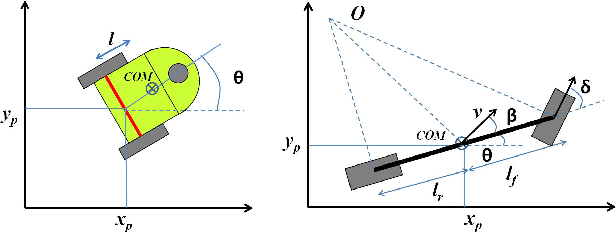
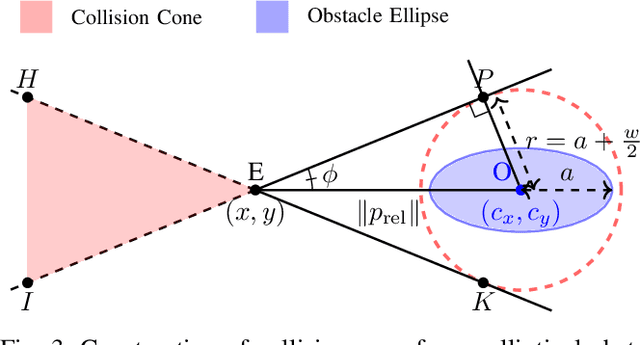
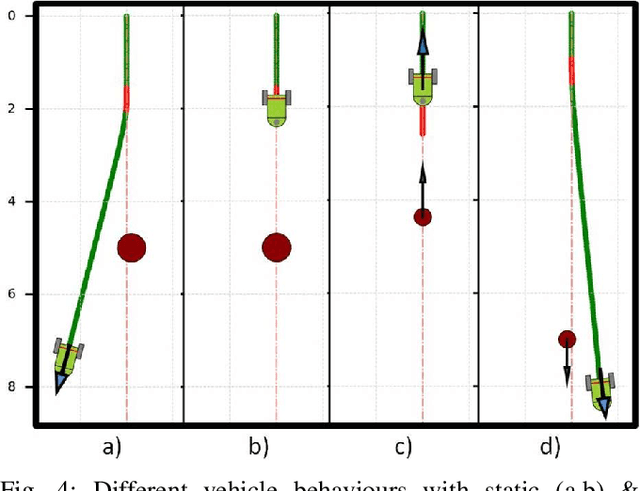
In this paper, we propose a new class of Control Barrier Functions (CBFs) for Unmanned Ground Vehicles (UGVs) that help avoid collisions with kinematic (non-zero velocity) obstacles. While the current forms of CBFs have been successful in guaranteeing safety/collision avoidance with static obstacles, extensions for the dynamic case have seen limited success. Moreover, with the UGV models like the unicycle or the bicycle, applications of existing CBFs have been conservative in terms of control, i.e., steering/thrust control has not been possible under certain scenarios. Drawing inspiration from the classical use of collision cones for obstacle avoidance in trajectory planning, we introduce its novel CBF formulation with theoretical guarantees on safety for both the unicycle and bicycle models. The main idea is to ensure that the velocity of the obstacle w.r.t. the vehicle is always pointing away from the vehicle. Accordingly, we construct a constraint that ensures that the velocity vector always avoids a cone of vectors pointing at the vehicle. The efficacy of this new control methodology is experimentally verified on the Copernicus mobile robot. We further extend it to self-driving cars in the form of bicycle models and demonstrate collision avoidance under various scenarios in the CARLA simulator.
Design, Manufacturing, and Controls of a Prismatic Quadruped Robot: PRISMA
Dec 27, 2021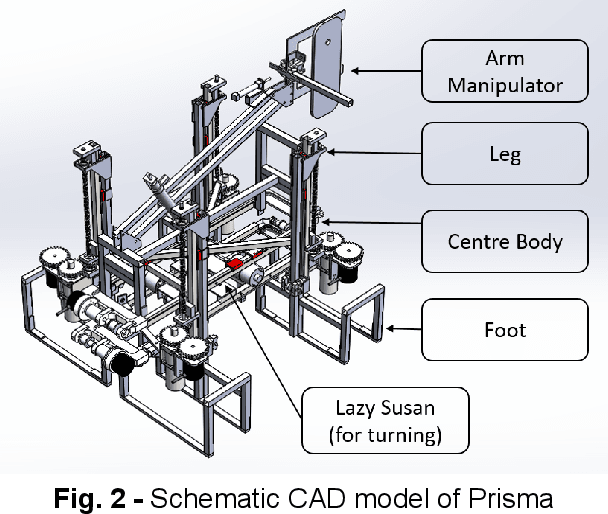
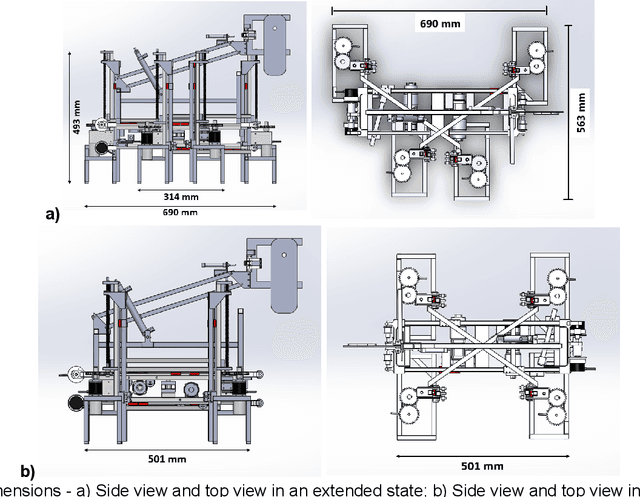
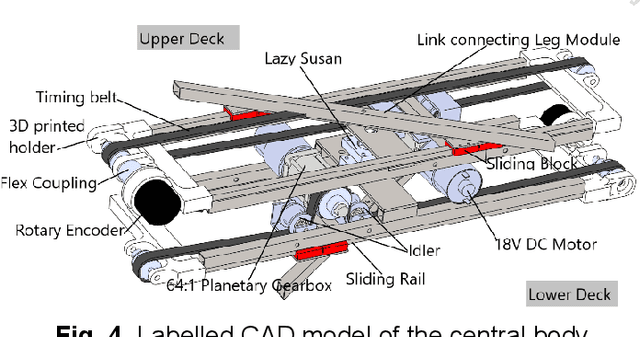
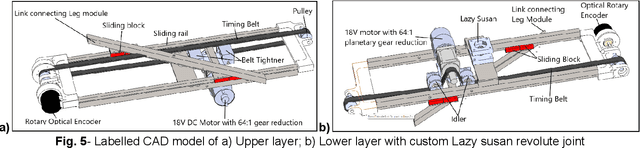
Most of the quadrupeds developed are highly actuated, and their control is hence quite cumbersome. They need advanced electronics equipment to solve convoluted inverse kinematic equations continuously. In addition, they demand special and costly sensors to autonomously navigate through the environment as traditional distance sensors usually fail because of the continuous perturbation due to the motion of the robot. Another challenge is maintaining the continuous dynamic stability of the robot while walking, which requires complicated and state-of-the-art control algorithms. This paper presents a thorough description of the hardware design and control architecture of our in-house prismatic joint quadruped robot called the PRISMA. We aim to forge a robust and kinematically stable quadruped robot that can use elementary control algorithms and utilize conventional sensors to navigate an unknown environment. We discuss the benefits and limitations of the robot in terms of its motion, different foot trajectories, manufacturability, and controls.