 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Spectral Energy Shifts in Spatio-Temporal Graph Anomaly Detection
May 29, 2026Graph anomaly detection methods aim to distinguish anomalous nodes. While prior methods characterize anomalies through increased variation in the spectral energy distributions, they overlook those that result in decreased variation, i.e., camouflaged anomalies that appear normal. We show that this type of anomaly persists across multiple datasets and remains undetectable by existing spectral approaches. To address this limitation, we propose a node-level spectral energy formulation that is fully compatible with message passing and enables the detection of camouflaged anomalies. Building on this formulation, we introduce an energy-aware graph learning framework that models spectral shifts through energy-driven message passing in both static and time-series graphs. Besides, our unified architecture extends to temporal settings without introducing specialized sequence modules, enabling efficient learning under long sliding windows. Extensive experiments on large-scale benchmarks demonstrate the effectiveness and scalability of our approach.
k-Inductive Neural Barrier Certificates for Unknown Nonlinear Dynamics
May 19, 2026While conventional (k=1) discrete-time barrier certificate conditions impose strict safety constraints by requiring the function to be non-increasing at every step, k-inductive barrier certificates relax this by allowing a temporary increase -- up to k-1 times, each within a threshold $ε$ -- while maintaining overall safety, and improving flexibility. This paper leverages neural networks and constructs k-inductive neural barrier certificates (k-NBCs) for (partially) unknown nonlinear systems. While neural networks offer scalability in the design process, they lack formal guarantees, requiring additional approaches such as counterexample-guided inductive synthesis (CEGIS) with satisfiability modulo theories (SMT) for verification. However, the CEGIS-SMT framework requires knowledge of system dynamics, which is unavailable in practical settings. To address this, we leverage the generalization of the Willems et al.'s fundamental lemma, using a single state trajectory, to construct a data-driven representation of (partially) unknown models for SMT verification without sacrificing accuracy. Additionally, CEGIS-SMT further removes the constraint of restricting barrier certificates to specific function classes, such as sum-of-squares, enabling greater flexibility in their design. We validate our approach on three nonlinear case studies with (partially) unknown dynamics.
Verification and Forward Invariance of Control Barrier Functions for Differential-Algebraic Systems
Mar 13, 2026Differential-algebraic equations (DAEs) arise in power networks, chemical processes, and multibody systems, where algebraic constraints encode physical conservation laws. The safety of such systems is critical, yet safe control is challenging because algebraic constraints restrict allowable state trajectories. Control barrier functions (CBFs) provide computationally efficient safety filters for ordinary differential equation (ODE) systems. However, existing CBF methods are not directly applicable to DAEs due to potential conflicts between the CBF condition and the constraint manifold. This paper introduces DAE-aware CBFs that incorporate the differential-algebraic structure through projected vector fields. We derive conditions that ensure forward invariance of safe sets while preserving algebraic constraints and extend the framework to higher-index DAEs. A systematic verification framework is developed, establishing necessary and sufficient conditions for geometric correctness and feasibility of DAE-aware CBFs. For polynomial systems, sum-of-squares certificates are provided, while for nonpolynomial and neural network candidates, satisfiability modulo theories are used for falsification. The approach is validated on wind turbine and flexible-link manipulator systems.
PACE: A Personalized Adaptive Curriculum Engine for 9-1-1 Call-taker Training
Mar 05, 20269-1-1 call-taking training requires mastery of over a thousand interdependent skills, covering diverse incident types and protocol-specific nuances. A nationwide labor shortage is already straining training capacity, but effective instruction still demands that trainers tailor objectives to each trainee's evolving competencies. This personalization burden is one that current practice cannot scale. Partnering with Metro Nashville Department of Emergency Communications (MNDEC), we propose PACE (Personalized Adaptive Curriculum Engine), a co-pilot system that augments trainer decision-making by (1) maintaining probabilistic beliefs over trainee skill states, (2) modeling individual learning and forgetting dynamics, and (3) recommending training scenarios that balance acquisition of new competencies with retention of existing ones. PACE propagates evidence over a structured skill graph to accelerate diagnostic coverage and applies contextual bandits to select scenarios that target gaps the trainee is prepared to address. Empirical results show that PACE achieves 19.50% faster time-to-competence and 10.95% higher terminal mastery compared to state-of-the-art frameworks. Co-pilot studies with practicing training officers further demonstrate a 95.45% alignment rate between PACE's and experts' pedagogical judgments on real-world cases. Under estimation, PACE cuts turnaround time to merely 34 seconds from 11.58 minutes, up to 95.08% reduction.
SEEV: Synthesis with Efficient Exact Verification for ReLU Neural Barrier Functions
Oct 27, 2024



Neural Control Barrier Functions (NCBFs) have shown significant promise in enforcing safety constraints on nonlinear autonomous systems. State-of-the-art exact approaches to verifying safety of NCBF-based controllers exploit the piecewise-linear structure of ReLU neural networks, however, such approaches still rely on enumerating all of the activation regions of the network near the safety boundary, thus incurring high computation cost. In this paper, we propose a framework for Synthesis with Efficient Exact Verification (SEEV). Our framework consists of two components, namely (i) an NCBF synthesis algorithm that introduces a novel regularizer to reduce the number of activation regions at the safety boundary, and (ii) a verification algorithm that exploits tight over-approximations of the safety conditions to reduce the cost of verifying each piecewise-linear segment. Our simulations show that SEEV significantly improves verification efficiency while maintaining the CBF quality across various benchmark systems and neural network structures. Our code is available at https://github.com/HongchaoZhang-HZ/SEEV.
Verification and Synthesis of Compatible Control Lyapunov and Control Barrier Functions
Jun 27, 2024
Safety and stability are essential properties of control systems. Control Barrier Functions (CBFs) and Control Lyapunov Functions (CLFs) have been proposed to ensure safety and stability respectively. However, previous approaches typically verify and synthesize the CBFs and CLFs separately, satisfying their respective constraints, without proving that the CBFs and CLFs are compatible with each other, namely at every state, there exists control actions that satisfy both the CBF and CLF constraints simultaneously. There exists some recent works that synthesized compatible CLF and CBF, but relying on nominal polynomial or rational controllers, which is just a sufficient but not necessary condition for compatibility. In this work, we investigate verification and synthesis of compatible CBF and CLF independent from any nominal controllers. We derive exact necessary and sufficient conditions for compatibility, and further formulate Sum-Of-Squares program for the compatibility verification. Based on our verification framework, we also design an alternating nominal-controller-free synthesis method. We evaluate our method in a linear toy, a non-linear toy, and a power converter example.
Learning a Formally Verified Control Barrier Function in Stochastic Environment
Mar 28, 2024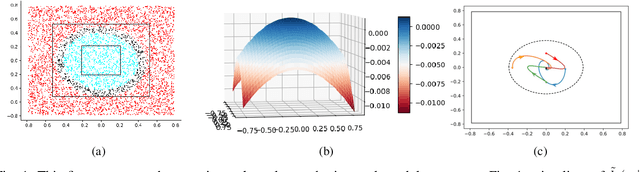
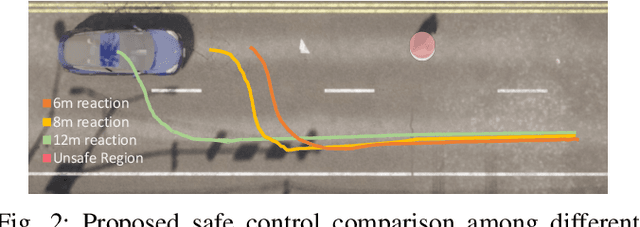
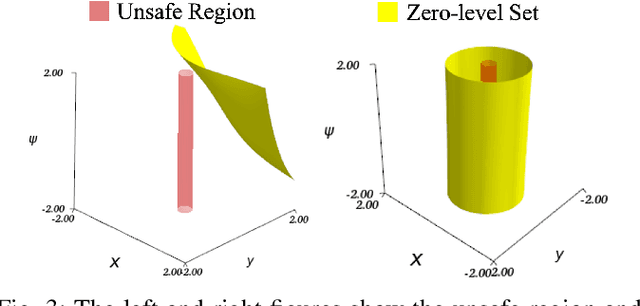
Safety is a fundamental requirement of control systems. Control Barrier Functions (CBFs) are proposed to ensure the safety of the control system by constructing safety filters or synthesizing control inputs. However, the safety guarantee and performance of safe controllers rely on the construction of valid CBFs. Inspired by universal approximatability, CBFs are represented by neural networks, known as neural CBFs (NCBFs). This paper presents an algorithm for synthesizing formally verified continuous-time neural Control Barrier Functions in stochastic environments in a single step. The proposed training process ensures efficacy across the entire state space with only a finite number of data points by constructing a sample-based learning framework for Stochastic Neural CBFs (SNCBFs). Our methodology eliminates the need for post hoc verification by enforcing Lipschitz bounds on the neural network, its Jacobian, and Hessian terms. We demonstrate the effectiveness of our approach through case studies on the inverted pendulum system and obstacle avoidance in autonomous driving, showcasing larger safe regions compared to baseline methods.
Fault Tolerant Neural Control Barrier Functions for Robotic Systems under Sensor Faults and Attacks
Feb 28, 2024

Safety is a fundamental requirement of many robotic systems. Control barrier function (CBF)-based approaches have been proposed to guarantee the safety of robotic systems. However, the effectiveness of these approaches highly relies on the choice of CBFs. Inspired by the universal approximation power of neural networks, there is a growing trend toward representing CBFs using neural networks, leading to the notion of neural CBFs (NCBFs). Current NCBFs, however, are trained and deployed in benign environments, making them ineffective for scenarios where robotic systems experience sensor faults and attacks. In this paper, we study safety-critical control synthesis for robotic systems under sensor faults and attacks. Our main contribution is the development and synthesis of a new class of CBFs that we term fault tolerant neural control barrier function (FT-NCBF). We derive the necessary and sufficient conditions for FT-NCBFs to guarantee safety, and develop a data-driven method to learn FT-NCBFs by minimizing a loss function constructed using the derived conditions. Using the learned FT-NCBF, we synthesize a control input and formally prove the safety guarantee provided by our approach. We demonstrate our proposed approach using two case studies: obstacle avoidance problem for an autonomous mobile robot and spacecraft rendezvous problem, with code available via https://github.com/HongchaoZhang-HZ/FTNCBF.
Exact Verification of ReLU Neural Control Barrier Functions
Oct 13, 2023



Control Barrier Functions (CBFs) are a popular approach for safe control of nonlinear systems. In CBF-based control, the desired safety properties of the system are mapped to nonnegativity of a CBF, and the control input is chosen to ensure that the CBF remains nonnegative for all time. Recently, machine learning methods that represent CBFs as neural networks (neural control barrier functions, or NCBFs) have shown great promise due to the universal representability of neural networks. However, verifying that a learned CBF guarantees safety remains a challenging research problem. This paper presents novel exact conditions and algorithms for verifying safety of feedforward NCBFs with ReLU activation functions. The key challenge in doing so is that, due to the piecewise linearity of the ReLU function, the NCBF will be nondifferentiable at certain points, thus invalidating traditional safety verification methods that assume a smooth barrier function. We resolve this issue by leveraging a generalization of Nagumo's theorem for proving invariance of sets with nonsmooth boundaries to derive necessary and sufficient conditions for safety. Based on this condition, we propose an algorithm for safety verification of NCBFs that first decomposes the NCBF into piecewise linear segments and then solves a nonlinear program to verify safety of each segment as well as the intersections of the linear segments. We mitigate the complexity by only considering the boundary of the safe region and by pruning the segments with Interval Bound Propagation (IBP) and linear relaxation. We evaluate our approach through numerical studies with comparison to state-of-the-art SMT-based methods. Our code is available at https://github.com/HongchaoZhang-HZ/exactverif-reluncbf-nips23.
Generalized Uniformly Optimal Methods for Nonlinear Programming
Sep 12, 2015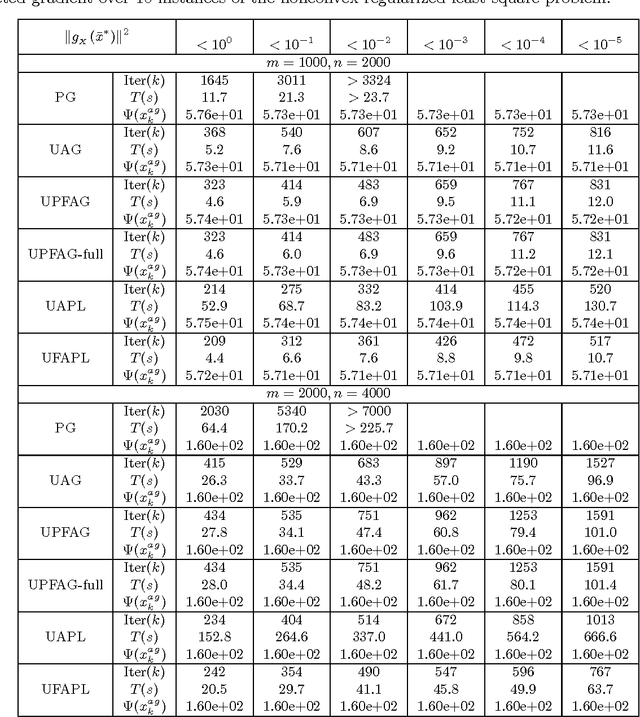
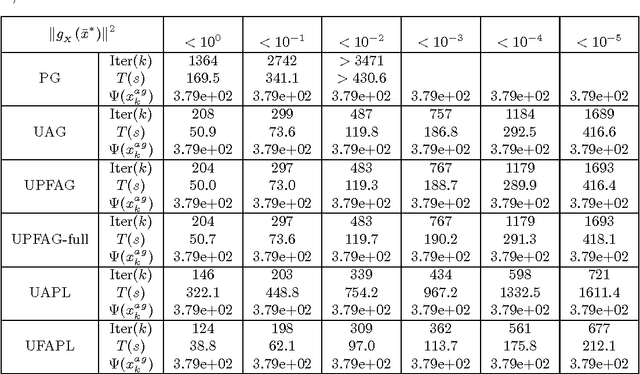
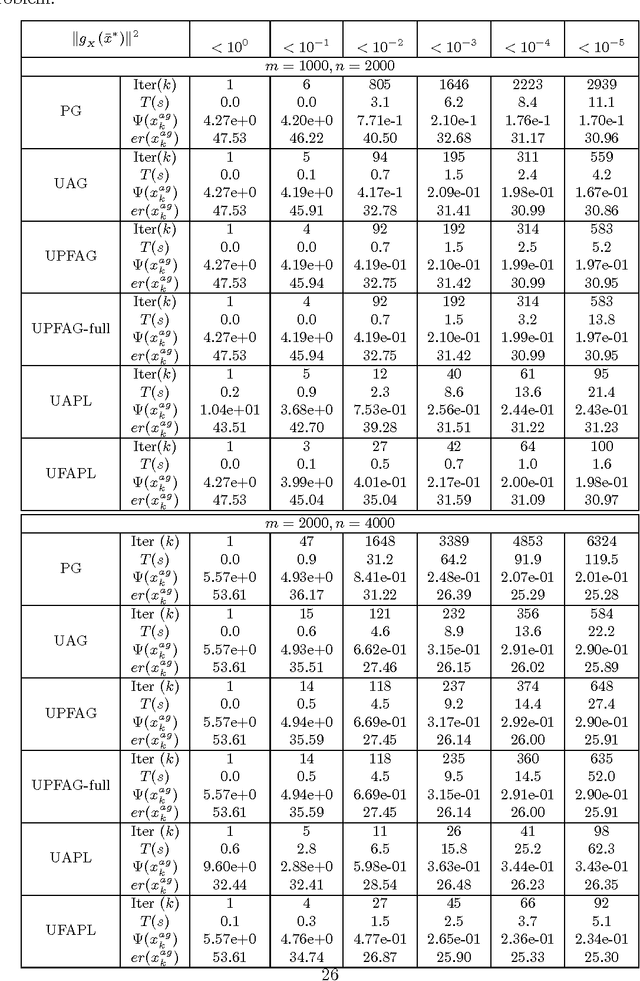
In this paper, we present a generic framework to extend existing uniformly optimal convex programming algorithms to solve more general nonlinear, possibly nonconvex, optimization problems. The basic idea is to incorporate a local search step (gradient descent or Quasi-Newton iteration) into these uniformly optimal convex programming methods, and then enforce a monotone decreasing property of the function values computed along the trajectory. Algorithms of these types will then achieve the best known complexity for nonconvex problems, and the optimal complexity for convex ones without requiring any problem parameters. As a consequence, we can have a unified treatment for a general class of nonlinear programming problems regardless of their convexity and smoothness level. In particular, we show that the accelerated gradient and level methods, both originally designed for solving convex optimization problems only, can be used for solving both convex and nonconvex problems uniformly. In a similar vein, we show that some well-studied techniques for nonlinear programming, e.g., Quasi-Newton iteration, can be embedded into optimal convex optimization algorithms to possibly further enhance their numerical performance. Our theoretical and algorithmic developments are complemented by some promising numerical results obtained for solving a few important nonconvex and nonlinear data analysis problems in the literature.