 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Uniformly Optimal Methods for Nonlinear Programming
Paper and Code
Sep 12, 2015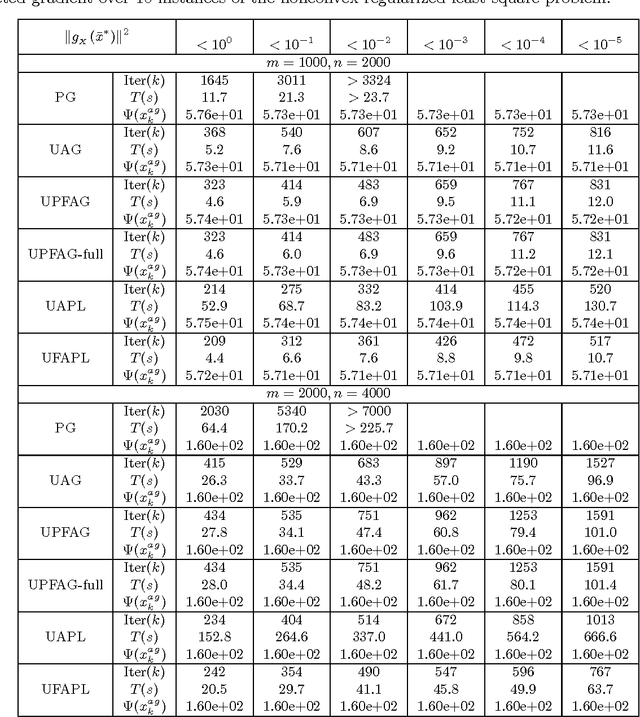
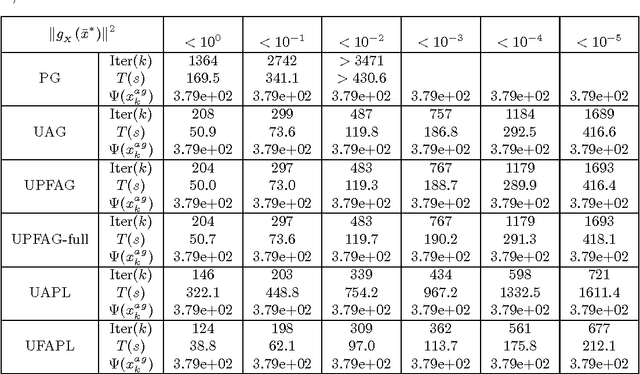
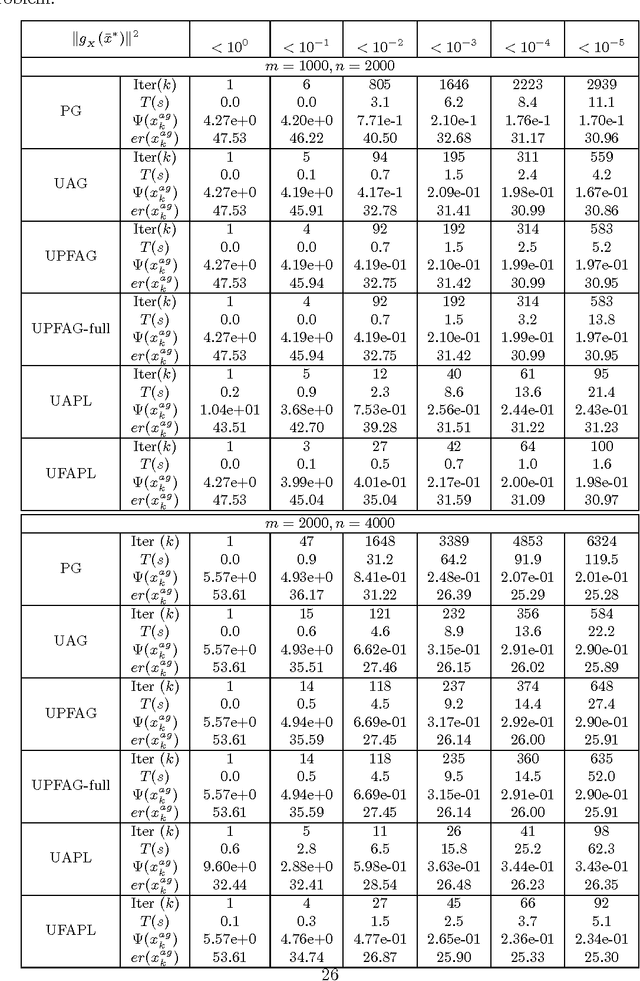
In this paper, we present a generic framework to extend existing uniformly optimal convex programming algorithms to solve more general nonlinear, possibly nonconvex, optimization problems. The basic idea is to incorporate a local search step (gradient descent or Quasi-Newton iteration) into these uniformly optimal convex programming methods, and then enforce a monotone decreasing property of the function values computed along the trajectory. Algorithms of these types will then achieve the best known complexity for nonconvex problems, and the optimal complexity for convex ones without requiring any problem parameters. As a consequence, we can have a unified treatment for a general class of nonlinear programming problems regardless of their convexity and smoothness level. In particular, we show that the accelerated gradient and level methods, both originally designed for solving convex optimization problems only, can be used for solving both convex and nonconvex problems uniformly. In a similar vein, we show that some well-studied techniques for nonlinear programming, e.g., Quasi-Newton iteration, can be embedded into optimal convex optimization algorithms to possibly further enhance their numerical performance. Our theoretical and algorithmic developments are complemented by some promising numerical results obtained for solving a few important nonconvex and nonlinear data analysis problems in the literature.