 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIRROR: Manifold Ideal Reference ReconstructOR for Generalizable AI-Generated Image Detection
Feb 02, 2026High-fidelity generative models have narrowed the perceptual gap between synthetic and real images, posing serious threats to media security. Most existing AI-generated image (AIGI) detectors rely on artifact-based classification and struggle to generalize to evolving generative traces. In contrast, human judgment relies on stable real-world regularities, with deviations from the human cognitive manifold serving as a more generalizable signal of forgery. Motivated by this insight, we reformulate AIGI detection as a Reference-Comparison problem that verifies consistency with the real-image manifold rather than fitting specific forgery cues. We propose MIRROR (Manifold Ideal Reference ReconstructOR), a framework that explicitly encodes reality priors using a learnable discrete memory bank. MIRROR projects an input into a manifold-consistent ideal reference via sparse linear combination, and uses the resulting residuals as robust detection signals. To evaluate whether detectors reach the "superhuman crossover" required to replace human experts, we introduce the Human-AIGI benchmark, featuring a psychophysically curated human-imperceptible subset. Across 14 benchmarks, MIRROR consistently outperforms prior methods, achieving gains of 2.1% on six standard benchmarks and 8.1% on seven in-the-wild benchmarks. On Human-AIGI, MIRROR reaches 89.6% accuracy across 27 generators, surpassing both lay users and visual experts, and further approaching the human perceptual limit as pretrained backbones scale. The code is publicly available at: https://github.com/349793927/MIRROR
Beyond Artifacts: Real-Centric Envelope Modeling for Reliable AI-Generated Image Detection
Dec 24, 2025The rapid progress of generative models has intensified the need for reliable and robust detection under real-world conditions. However, existing detectors often overfit to generator-specific artifacts and remain highly sensitive to real-world degradations. As generative architectures evolve and images undergo multi-round cross-platform sharing and post-processing (chain degradations), these artifact cues become obsolete and harder to detect. To address this, we propose Real-centric Envelope Modeling (REM), a new paradigm that shifts detection from learning generator artifacts to modeling the robust distribution of real images. REM introduces feature-level perturbations in self-reconstruction to generate near-real samples, and employs an envelope estimator with cross-domain consistency to learn a boundary enclosing the real image manifold. We further build RealChain, a comprehensive benchmark covering both open-source and commercial generators with simulated real-world degradation. Across eight benchmark evaluations, REM achieves an average improvement of 7.5% over state-of-the-art methods, and notably maintains exceptional generalization on the severely degraded RealChain benchmark, establishing a solid foundation for synthetic image detection under real-world conditions. The code and the RealChain benchmark will be made publicly available upon acceptance of the paper.
Hierarchical Multi-Graphs Learning for Robust Group Re-Identification
Dec 25, 2024



Group Re-identification (G-ReID) faces greater complexity than individual Re-identification (ReID) due to challenges like mutual occlusion, dynamic member interactions, and evolving group structures. Prior graph-based approaches have aimed to capture these dynamics by modeling the group as a single topological structure. However, these methods struggle to generalize across diverse group compositions, as they fail to fully represent the multifaceted relationships within the group. In this study, we introduce a Hierarchical Multi-Graphs Learning (HMGL) framework to address these challenges. Our approach models the group as a collection of multi-relational graphs, leveraging both explicit features (such as occlusion, appearance, and foreground information) and implicit dependencies between members. This hierarchical representation, encoded via a Multi-Graphs Neural Network (MGNN), allows us to resolve ambiguities in member relationships, particularly in complex, densely populated scenes. To further enhance matching accuracy, we propose a Multi-Scale Matching (MSM) algorithm, which mitigates issues of member information ambiguity and sensitivity to hard samples, improving robustness in challenging scenarios. Our method achieves state-of-the-art performance on two standard benchmarks, CSG and RoadGroup, with Rank-1/mAP scores of 95.3%/94.4% and 93.9%/95.4%, respectively. These results mark notable improvements of 1.7% and 2.5% in Rank-1 accuracy over existing approaches.
BoundarySqueeze: Image Segmentation as Boundary Squeezing
May 25, 2021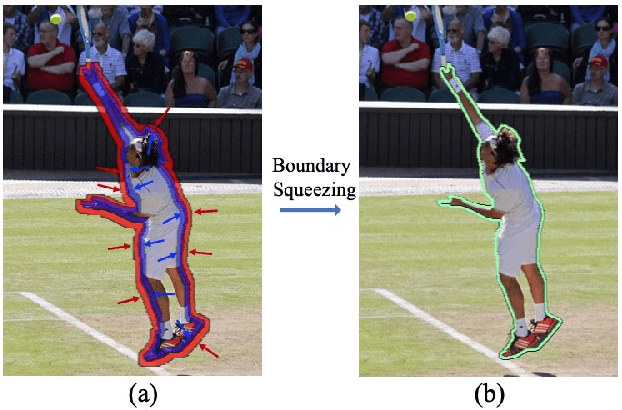
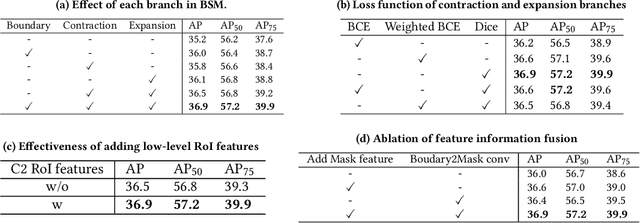
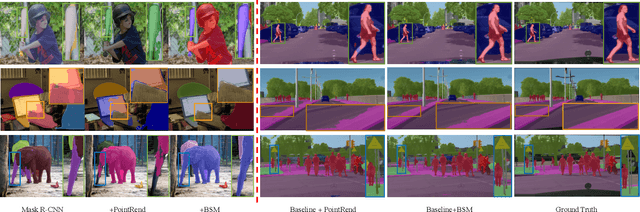
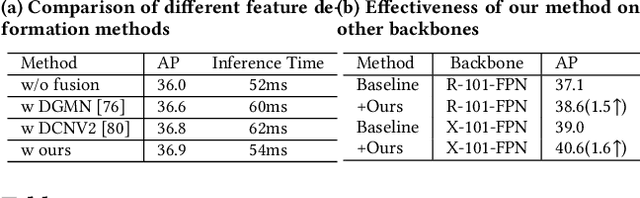
We propose a novel method for fine-grained high-quality image segmentation of both objects and scenes. Inspired by dilation and erosion from morphological image processing techniques, we treat the pixel level segmentation problems as squeezing object boundary. From this perspective, we propose \textbf{Boundary Squeeze} module: a novel and efficient module that squeezes the object boundary from both inner and outer directions which leads to precise mask representation. To generate such squeezed representation, we propose a new bidirectionally flow-based warping process and design specific loss signals to supervise the learning process. Boundary Squeeze Module can be easily applied to both instance and semantic segmentation tasks as a plug-and-play module by building on top of existing models. We show that our simple yet effective design can lead to high qualitative results on several different datasets and we also provide several different metrics on boundary to prove the effectiveness over previous work. Moreover, the proposed module is light-weighted and thus has potential for practical usage. Our method yields large gains on COCO, Cityscapes, for both instance and semantic segmentation and outperforms previous state-of-the-art PointRend in both accuracy and speed under the same setting. Code and model will be available.
Enhanced Boundary Learning for Glass-like Object Segmentation
Mar 29, 2021
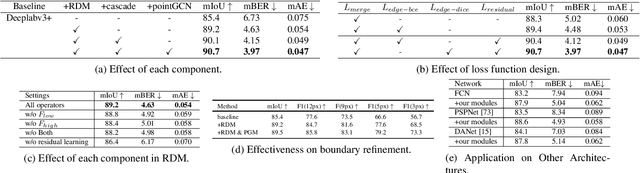
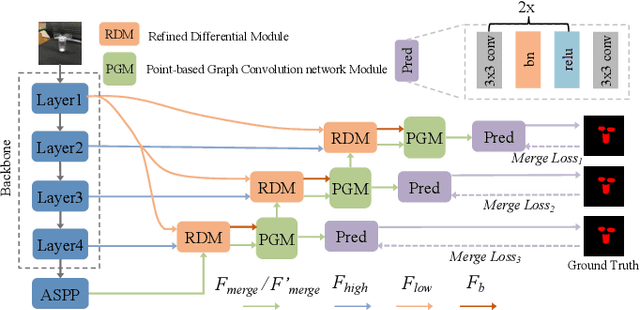

Glass-like objects such as windows, bottles, and mirrors exist widely in the real world. Sensing these objects has many applications, including robot navigation and grasping. However, this task is very challenging due to the arbitrary scenes behind glass-like objects. This paper aims to solve the glass-like object segmentation problem via enhanced boundary learning. In particular, we first propose a novel refined differential module for generating finer boundary cues. Then an edge-aware point-based graph convolution network module is proposed to model the global shape representation along the boundary. Both modules are lightweight and effective, which can be embedded into various segmentation models. Moreover, we use these two modules to design a decoder to get accurate segmentation results, especially on the boundary. Extensive experiments on three recent glass-like object segmentation datasets, including Trans10k, MSD, and GDD, show that our approach establishes new state-of-the-art performances. We also offer the generality and superiority of our approach compared with recent methods on three general segmentation datasets, including Cityscapes, BDD, and COCO Stuff. Code and models will be available at (\url{https://github.com/hehao13/EBLNet})
PointFlow: Flowing Semantics Through Points for Aerial Image Segmentation
Mar 11, 2021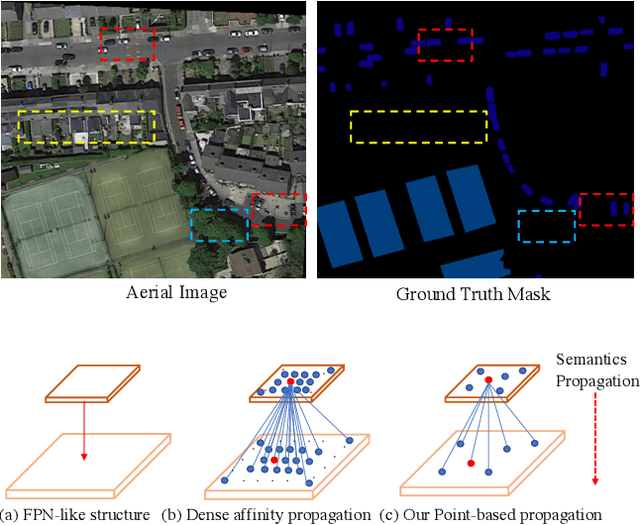
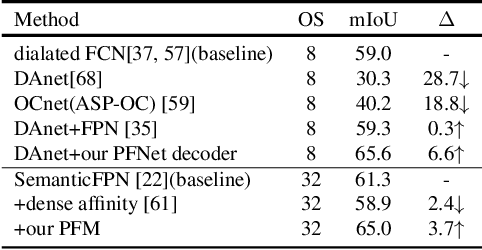

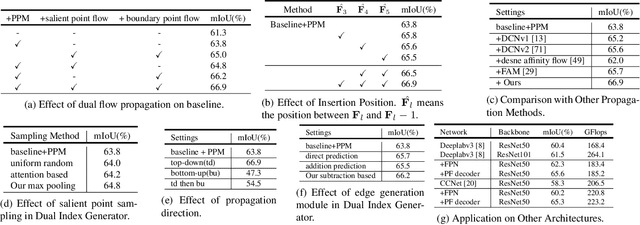
Aerial Image Segmentation is a particular semantic segmentation problem and has several challenging characteristics that general semantic segmentation does not have. There are two critical issues: The one is an extremely foreground-background imbalanced distribution, and the other is multiple small objects along with the complex background. Such problems make the recent dense affinity context modeling perform poorly even compared with baselines due to over-introduced background context. To handle these problems, we propose a point-wise affinity propagation module based on the Feature Pyramid Network (FPN) framework, named PointFlow. Rather than dense affinity learning, a sparse affinity map is generated upon selected points between the adjacent features, which reduces the noise introduced by the background while keeping efficiency. In particular, we design a dual point matcher to select points from the salient area and object boundaries, respectively. Experimental results on three different aerial segmentation datasets suggest that the proposed method is more effective and efficient than state-of-the-art general semantic segmentation methods. Especially, our methods achieve the best speed and accuracy trade-off on three aerial benchmarks. Further experiments on three general semantic segmentation datasets prove the generality of our method. Code will be provided in (https: //github.com/lxtGH/PFSegNets).