 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Boundary Learning for Glass-like Object Segmentation
Paper and Code

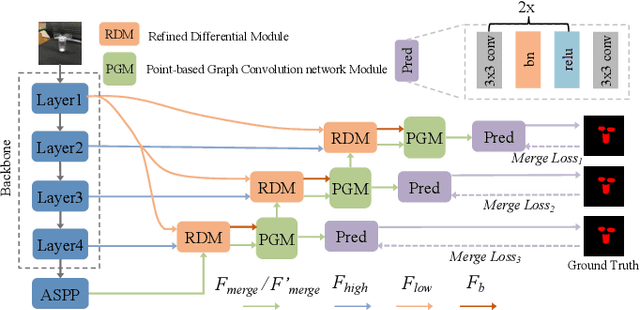

Glass-like objects such as windows, bottles, and mirrors exist widely in the real world. Sensing these objects has many applications, including robot navigation and grasping. However, this task is very challenging due to the arbitrary scenes behind glass-like objects. This paper aims to solve the glass-like object segmentation problem via enhanced boundary learning. In particular, we first propose a novel refined differential module for generating finer boundary cues. Then an edge-aware point-based graph convolution network module is proposed to model the global shape representation along the boundary. Both modules are lightweight and effective, which can be embedded into various segmentation models. Moreover, we use these two modules to design a decoder to get accurate segmentation results, especially on the boundary. Extensive experiments on three recent glass-like object segmentation datasets, including Trans10k, MSD, and GDD, show that our approach establishes new state-of-the-art performances. We also offer the generality and superiority of our approach compared with recent methods on three general segmentation datasets, including Cityscapes, BDD, and COCO Stuff. Code and models will be available at (\url{https://github.com/hehao13/EBLNet})