 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Boundary Learning for Glass-like Object Segmentation
Mar 29, 2021
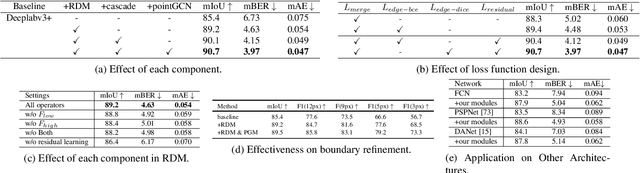
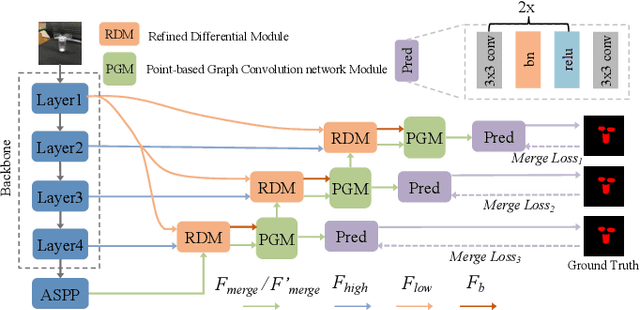

Glass-like objects such as windows, bottles, and mirrors exist widely in the real world. Sensing these objects has many applications, including robot navigation and grasping. However, this task is very challenging due to the arbitrary scenes behind glass-like objects. This paper aims to solve the glass-like object segmentation problem via enhanced boundary learning. In particular, we first propose a novel refined differential module for generating finer boundary cues. Then an edge-aware point-based graph convolution network module is proposed to model the global shape representation along the boundary. Both modules are lightweight and effective, which can be embedded into various segmentation models. Moreover, we use these two modules to design a decoder to get accurate segmentation results, especially on the boundary. Extensive experiments on three recent glass-like object segmentation datasets, including Trans10k, MSD, and GDD, show that our approach establishes new state-of-the-art performances. We also offer the generality and superiority of our approach compared with recent methods on three general segmentation datasets, including Cityscapes, BDD, and COCO Stuff. Code and models will be available at (\url{https://github.com/hehao13/EBLNet})
Road Curb Detection and Localization with Monocular Forward-view Vehicle Camera
Feb 28, 2020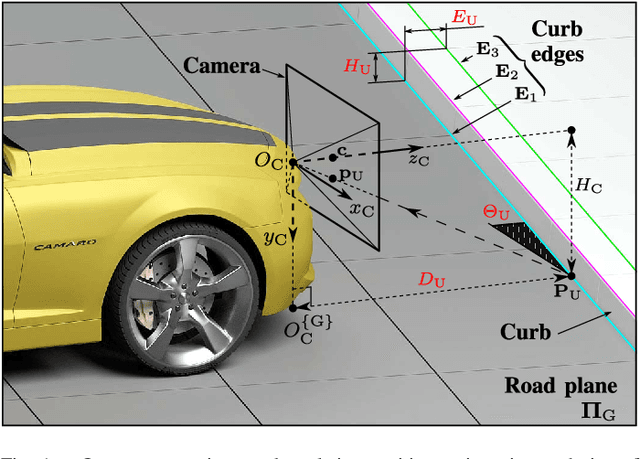
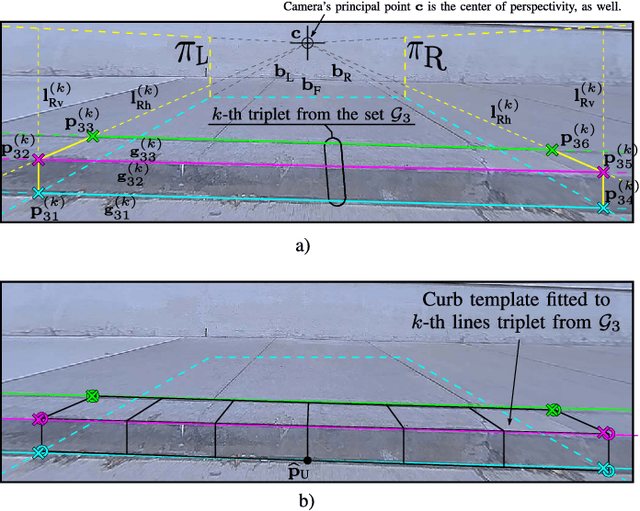
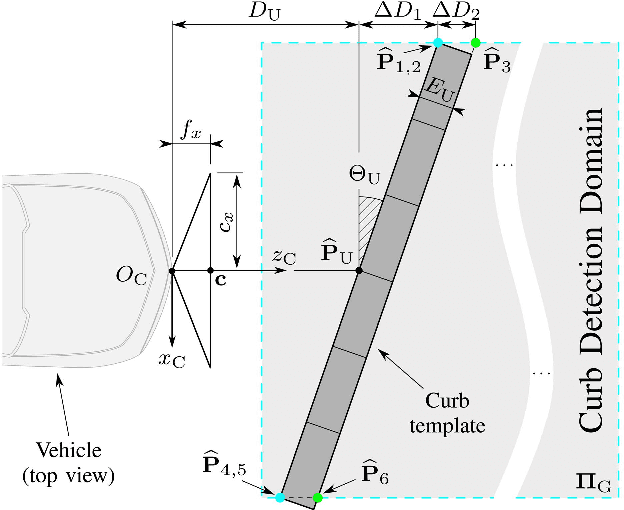
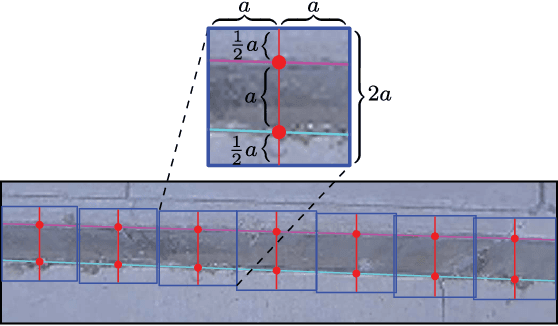
We propose a robust method for estimating road curb 3D parameters (size, location, orientation) using a calibrated monocular camera equipped with a fisheye lens. Automatic curb detection and localization is particularly important in the context of Advanced Driver Assistance System (ADAS), i.e. to prevent possible collision and damage of the vehicle's bumper during perpendicular and diagonal parking maneuvers. Combining 3D geometric reasoning with advanced vision-based detection methods, our approach is able to estimate the vehicle to curb distance in real time with mean accuracy of more than 90%, as well as its orientation, height and depth. Our approach consists of two distinct components - curb detection in each individual video frame and temporal analysis. The first part comprises of sophisticated curb edges extraction and parametrized 3D curb template fitting. Using a few assumptions regarding the real world geometry, we can thus retrieve the curb's height and its relative position w.r.t. the moving vehicle on which the camera is mounted. Support Vector Machine (SVM) classifier fed with Histograms of Oriented Gradients (HOG) is used for appearance-based filtering out outliers. In the second part, the detected curb regions are tracked in the temporal domain, so as to perform a second pass of false positives rejection. We have validated our approach on a newly collected database of 11 videos under different conditions. We have used point-wise LIDAR measurements and manual exhaustive labels as a ground truth.
* 17 pages, 21 figures, IEEE Transactions on Intelligent Transportation Systems