 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting Multi-User Downlink in IEEE 802.11ax: A Designers Guide to MU-MIMO
Jun 09, 2024Downlink (DL) Multi-User (MU) Multiple Input Multiple Output (MU-MIMO) is a key technology that allows multiple concurrent data transmissions from an Access Point (AP) to a selected sub-set of clients for higher network efficiency in IEEE 802.11ax. However, DL MU-MIMO feature is typically turned off as the default setting in AP vendors' products, that is, turning on the DL MU-MIMO may not help increase the network efficiency, which is counter-intuitive. In this article, we provide a sufficiently deep understanding of the interplay between the various underlying factors, i.e., CSI overhead and spatial correlation, which result in negative results when turning on the DL MU-MIMO. Furthermore, we provide a fundamental guideline as a function of operational scenarios to address the fundamental question "when the DL MU-MIMO should be turned on/off".
Hybrid Internal Model: Learning Agile Legged Locomotion with Simulated Robot Response
Jan 02, 2024Robust locomotion control depends on accurate state estimations. However, the sensors of most legged robots can only provide partial and noisy observations, making the estimation particularly challenging, especially for external states like terrain frictions and elevation maps. Inspired by the classical Internal Model Control principle, we consider these external states as disturbances and introduce Hybrid Internal Model (HIM) to estimate them according to the response of the robot. The response, which we refer to as the hybrid internal embedding, contains the robot's explicit velocity and implicit stability representation, corresponding to two primary goals for locomotion tasks: explicitly tracking velocity and implicitly maintaining stability. We use contrastive learning to optimize the embedding to be close to the robot's successor state, in which the response is naturally embedded. HIM has several appealing benefits: It only needs the robot's proprioceptions, i.e., those from joint encoders and IMU as observations. It innovatively maintains consistent observations between simulation reference and reality that avoids information loss in mimicking learning. It exploits batch-level information that is more robust to noises and keeps better sample efficiency. It only requires 1 hour of training on an RTX 4090 to enable a quadruped robot to traverse any terrain under any disturbances. A wealth of real-world experiments demonstrates its agility, even in high-difficulty tasks and cases never occurred during the training process, revealing remarkable open-world generalizability.
Codebook-based Uplink Transmission Enhancement in 5G Advanced: Sub-band Precoding
Oct 30, 2023



The transformative enhancements of fifth-generation (5G) mobile devices bring about new challenges to achieve better uplink (UL) performance. Particularly, in codebook-based transmission, the wide-band (WB) precoding and the legacy UL codebook may become main bottlenecks for higher efficient data transmission. In this paper, we investigate the codebook-based UL single-layer transmission performance using fully coherent antenna ports in the context of sub-band (SB) precoding. We analyze the SB precoder selection criteria and design an UL codebook used for SB precoding by increasing the number of relative phase shifts of each port. Via link-level simulations, we verify that the UL SB precoding can improve up to 2 dB performance gain in terms of the block error rate (BLER) compared with the UL WB precoding which is the current UL precoding scheme. We also show that UL performance gain is sensitive to the SB size selection as well as the relative phase shift diversity.
Detecting Vulnerable Nodes in Urban Infrastructure Interdependent Network
Aug 01, 2023Understanding and characterizing the vulnerability of urban infrastructures, which refers to the engineering facilities essential for the regular running of cities and that exist naturally in the form of networks, is of great value to us. Potential applications include protecting fragile facilities and designing robust topologies, etc. Due to the strong correlation between different topological characteristics and infrastructure vulnerability and their complicated evolution mechanisms, some heuristic and machine-assisted analysis fall short in addressing such a scenario. In this paper, we model the interdependent network as a heterogeneous graph and propose a system based on graph neural network with reinforcement learning, which can be trained on real-world data, to characterize the vulnerability of the city system accurately. The presented system leverages deep learning techniques to understand and analyze the heterogeneous graph, which enables us to capture the risk of cascade failure and discover vulnerable infrastructures of cities. Extensive experiments with various requests demonstrate not only the expressive power of our system but also transferring ability and necessity of the specific components.
Architecture-Algorithmic Trade-offs in Multi-path Channel Estimation for mmWAVE Systems
Sep 07, 2022


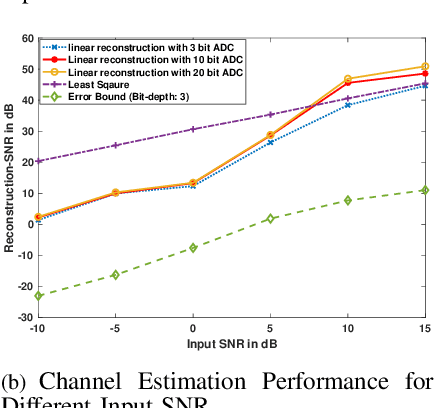
5G mmWave massive MIMO systems are likely to be deployed in dense urban scenarios, where increasing network capacity is the primary objective. A key component in mmWave transceiver design is channel estimation which is challenging due to the very large signal bandwidths (order of GHz) implying significant resolved spatial multipath, coupled with large # of Tx/Rx antennas for large-scale MIMO. This results in significantly increased training overhead that in turn leads to unacceptably high computational complexity and power cost. Our work thus highlights the interplay of transceiver architecture and receiver signal processing algorithm choices that fundamentally address (mobile) handset power consumption, with minimal degradation in performance. We investigate trade-offs enabled by conjunction of hybrid beamforming mmWave receiver and channel estimation algorithms that exploit available sparsity in such wideband scenarios. A compressive sensing (CS) framework for sparse channel estimation -- Binary Iterative Hard Thresholding (BIHT) \cite{jacques2013robust} followed by linear reconstruction method with varying quantization (ADC) levels -- is explored to compare the trade-offs between bit-depth and sampling rate for a given ADC power budget. Performance analysis of the BIHT+ linear reconstruction method is conducted via simulation studies for 5G specified multi-path channel models and compared to oracle-assisted bounds for validation.
Efficient PHY Layer Abstraction under Imperfect Channel Estimation
May 24, 2022
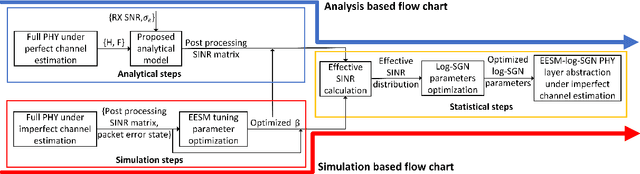
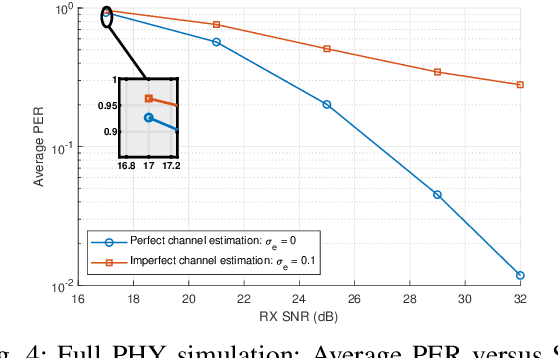
As network simulator has been suffering from the large computational complexity in the physical (PHY) layer, a PHY layer abstraction model that efficiently and accurately characterizes the PHY layer performance from the system level simulations is well-needed. However, most existing work investigate the PHY layer abstraction under an assumption of perfect channel estimation, as a result, such a model may become unreliable if there exists channel estimation error in a real communication system. This work improves an efficient PHY layer method, EESM-log-SGN PHY layer abstraction, by considering the presence of channel estimation error. We develop two methods for implementing the EESM-log-SGN PHY abstraction under imperfect channel estimation. Meanwhile, we present the derivation of effective Signal-to-Interference-plus-Noise-Ratio (SINR) for minimum mean squared error (MMSE) receivers impacted by the channel estimation error. Via full PHY simulations, we verify that the effective SINR is not impacted by the channel estimation error under multiple-input and single-output (MISO)/single-input and single-output (SISO) configuration. Finally, the developed methods are validated under different orthogonal frequency division multiplexing (OFDM) scenarios.