 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting Multi-User Downlink in IEEE 802.11ax: A Designers Guide to MU-MIMO
Jun 09, 2024Downlink (DL) Multi-User (MU) Multiple Input Multiple Output (MU-MIMO) is a key technology that allows multiple concurrent data transmissions from an Access Point (AP) to a selected sub-set of clients for higher network efficiency in IEEE 802.11ax. However, DL MU-MIMO feature is typically turned off as the default setting in AP vendors' products, that is, turning on the DL MU-MIMO may not help increase the network efficiency, which is counter-intuitive. In this article, we provide a sufficiently deep understanding of the interplay between the various underlying factors, i.e., CSI overhead and spatial correlation, which result in negative results when turning on the DL MU-MIMO. Furthermore, we provide a fundamental guideline as a function of operational scenarios to address the fundamental question "when the DL MU-MIMO should be turned on/off".
Static Background Removal in Vehicular Radar: Filtering in Azimuth-Elevation-Doppler Domain
Jul 04, 2023



A significant challenge in autonomous driving systems lies in image understanding within complex environments, particularly dense traffic scenarios. An effective solution to this challenge involves removing the background or static objects from the scene, so as to enhance the detection of moving targets as key component of improving overall system performance. In this paper, we present an efficient algorithm for background removal in automotive radar applications, specifically utilizing a frequency-modulated continuous wave (FMCW) radar. Our proposed algorithm follows a three-step approach, encompassing radar signal preprocessing, three-dimensional (3D) ego-motion estimation, and notch filter-based background removal in the azimuth-elevation-Doppler domain. To begin, we model the received signal of the FMCW multiple-input multiple-output (MIMO) radar and develop a signal processing framework for extracting four-dimensional (4D) point clouds. Subsequently, we introduce a robust 3D ego-motion estimation algorithm that accurately estimates radar ego-motion speed, accounting for Doppler ambiguity, by processing the point clouds. Additionally, our algorithm leverages the relationship between Doppler velocity, azimuth angle, elevation angle, and radar ego-motion speed to identify the spectrum belonging to background clutter. Subsequently, we employ notch filters to effectively filter out the background clutter. The performance of our algorithm is evaluated using both simulated data and extensive experiments with real-world data. The results demonstrate its effectiveness in efficiently removing background clutter and enhacing perception within complex environments. By offering a fast and computationally efficient solution, our approach effectively addresses challenges posed by non-homogeneous environments and real-time processing requirements.
Mutual Interference Mitigation for MIMO-FMCW Automotive Radar
Apr 06, 2023



This paper considers mutual interference mitigation among automotive radars using frequency-modulated continuous wave (FMCW) signal and multiple-input multiple-output (MIMO) virtual arrays. For the first time, we derive a general interference signal model that fully accounts for not only the time-frequency incoherence, e.g., different FMCW configuration parameters and time offsets, but also the slow-time code MIMO incoherence and array configuration differences between the victim and interfering radars. Along with a standard MIMO-FMCW object signal model, we turn the interference mitigation into a spatial-domain object detection under incoherent MIMO-FMCW interference described by the explicit interference signal model, and propose a constant false alarm rate (CFAR) detector. More specifically, the proposed detector exploits the structural property of the derived interference model at both \emph{transmit} and \emph{receive} steering vector space. We also derive analytical closed-form expressions for probabilities of detection and false alarm. Performance evaluation using both synthetic-level and phased array system-level simulation confirms the effectiveness of our proposed detector over selected baseline methods.
Optimal Beam Training for mmWave Massive MIMO using 802.11ay
Nov 29, 2022Beam training of 802.11 ad is a technology that helps accelerate the analog weighting vector (AWV) selection process under the constraint of the existing code-book for AWV. However, 5G milli-meter wave (mmWave) multiple-input-multiple-output (MIMO) system brings challenges to this new technology due to the higher order of complexity of antennae. Hence, the existing codebook of 11ad is unlikely to even include the near-optimal AWV and the data rate will degrade severely. To cope with this situation, this paper proposed a new beam training protocol combined with the state-of-the-art compressed sensing channel estimation in order to find the AWV to maximize the optimal data-rate. Simulation is implemented to show the data-rate of AWV achieved by 11 ad is worse than the proposed protocol.
Architecture-Algorithmic Trade-offs in Multi-path Channel Estimation for mmWAVE Systems
Sep 07, 2022


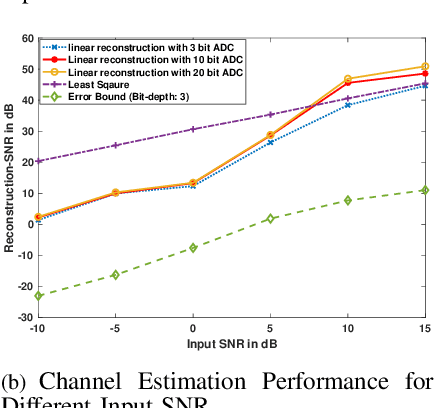
5G mmWave massive MIMO systems are likely to be deployed in dense urban scenarios, where increasing network capacity is the primary objective. A key component in mmWave transceiver design is channel estimation which is challenging due to the very large signal bandwidths (order of GHz) implying significant resolved spatial multipath, coupled with large # of Tx/Rx antennas for large-scale MIMO. This results in significantly increased training overhead that in turn leads to unacceptably high computational complexity and power cost. Our work thus highlights the interplay of transceiver architecture and receiver signal processing algorithm choices that fundamentally address (mobile) handset power consumption, with minimal degradation in performance. We investigate trade-offs enabled by conjunction of hybrid beamforming mmWave receiver and channel estimation algorithms that exploit available sparsity in such wideband scenarios. A compressive sensing (CS) framework for sparse channel estimation -- Binary Iterative Hard Thresholding (BIHT) \cite{jacques2013robust} followed by linear reconstruction method with varying quantization (ADC) levels -- is explored to compare the trade-offs between bit-depth and sampling rate for a given ADC power budget. Performance analysis of the BIHT+ linear reconstruction method is conducted via simulation studies for 5G specified multi-path channel models and compared to oracle-assisted bounds for validation.
Efficient PHY Layer Abstraction under Imperfect Channel Estimation
May 24, 2022
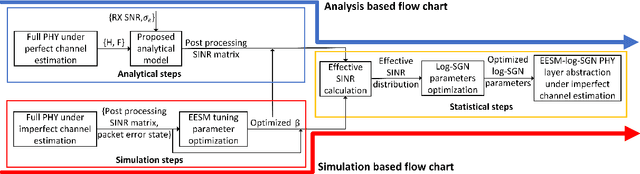
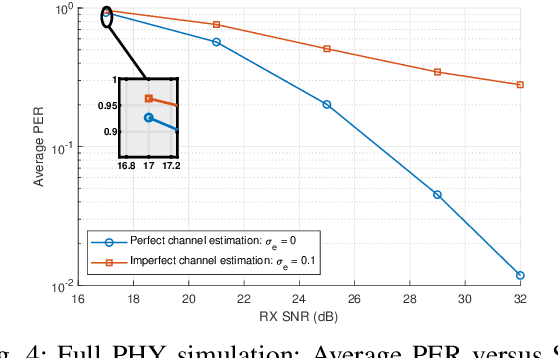
As network simulator has been suffering from the large computational complexity in the physical (PHY) layer, a PHY layer abstraction model that efficiently and accurately characterizes the PHY layer performance from the system level simulations is well-needed. However, most existing work investigate the PHY layer abstraction under an assumption of perfect channel estimation, as a result, such a model may become unreliable if there exists channel estimation error in a real communication system. This work improves an efficient PHY layer method, EESM-log-SGN PHY layer abstraction, by considering the presence of channel estimation error. We develop two methods for implementing the EESM-log-SGN PHY abstraction under imperfect channel estimation. Meanwhile, we present the derivation of effective Signal-to-Interference-plus-Noise-Ratio (SINR) for minimum mean squared error (MMSE) receivers impacted by the channel estimation error. Via full PHY simulations, we verify that the effective SINR is not impacted by the channel estimation error under multiple-input and single-output (MISO)/single-input and single-output (SISO) configuration. Finally, the developed methods are validated under different orthogonal frequency division multiplexing (OFDM) scenarios.
Learning to Detect Open Carry and Concealed Object with 77GHz Radar
Oct 31, 2021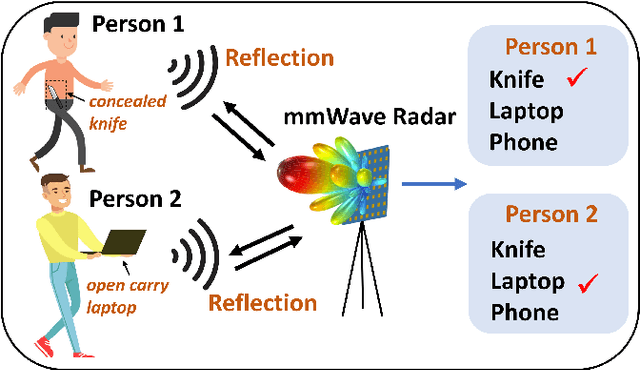
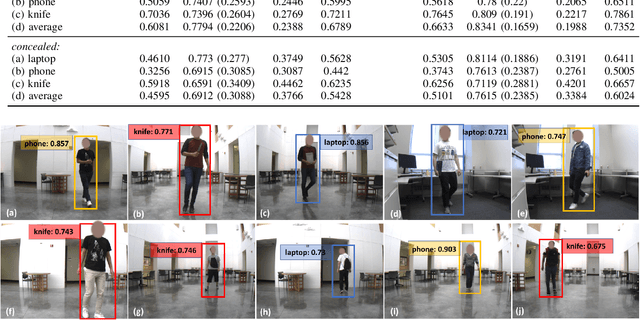
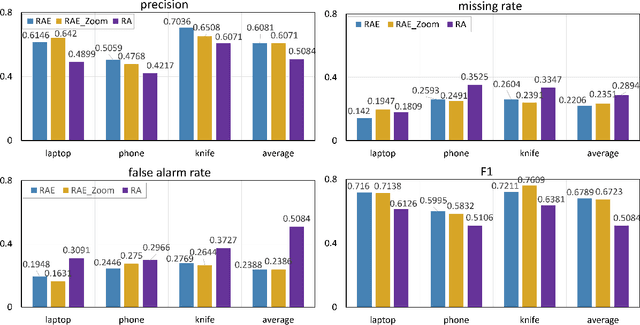
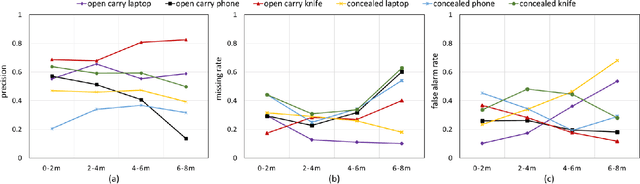
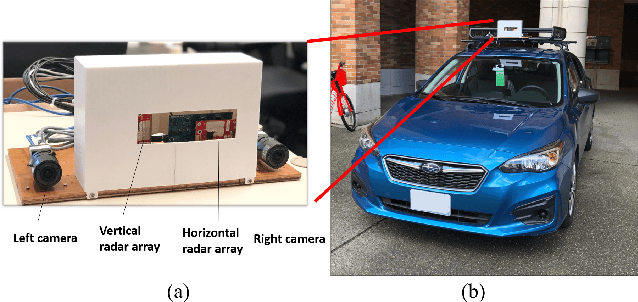
Detecting harmful carried objects plays a key role in intelligent surveillance systems and has widespread applications, for example, in airport security. In this paper, we focus on the relatively unexplored area of using low-cost 77GHz mmWave radar for the carried objects detection problem. The proposed system is capable of real-time detecting three classes of objects - laptop, phone, and knife - under open carry and concealed cases where objects are hidden with clothes or bags. This capability is achieved by initial signal processing for localization and generating range-azimuth-elevation image cubes, followed by a deep learning-based prediction network and a multi-shot post-processing module for detecting objects. Extensive experiments for validating the system performance on detecting open carry and concealed objects have been presented with a self-built radar-camera testbed and dataset. Additionally, the influence of different input, factors, and parameters on system performance is analyzed, providing an intuitive understanding of the system. This system would be the very first baseline for other future works aiming to detect carried objects using 77GHz radar.
Perception Through 2D-MIMO FMCW Automotive Radar Under Adverse Weather
Apr 23, 2021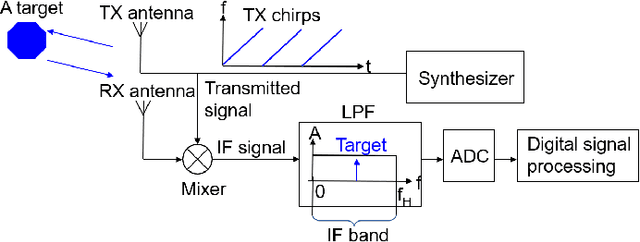
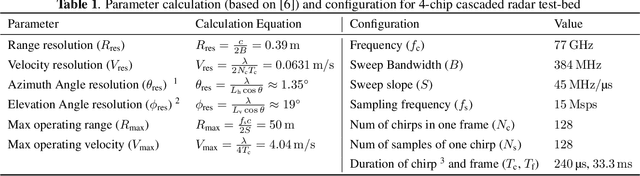
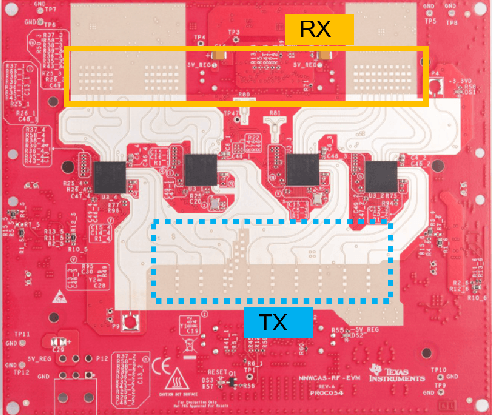
Millimeter-wave (mmWave) radars are being increasingly integrated in commercial vehicles to support new Adaptive Driver Assisted Systems (ADAS) features that require accurate location and Doppler velocity estimates of objects, independent of environmental conditions. To explore radar-based ADAS applications, we have updated our test-bed with Texas Instrument's 4-chip cascaded FMCW radar (TIDEP-01012) that forms a non-uniform 2D MIMO virtual array. In this paper, we develop the necessary received signal models for applying different direction of arrival (DoA) estimation algorithms and experimentally validating their performance on formed virtual array under controlled scenarios. To test the robustness of mmWave radars under adverse weather conditions, we collected raw radar dataset (I-Q samples post demodulated) for various objects by a driven vehicle-mounted platform, specifically for snowy and foggy situations where cameras are largely ineffective. Initial results from radar imaging algorithms to this dataset are presented.
MIMO-SAR: A Hierarchical High-resolution Imaging Algorithm for FMCW Automotive Radar
Jan 22, 2021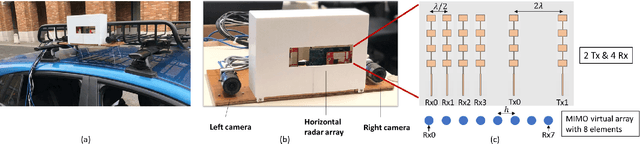
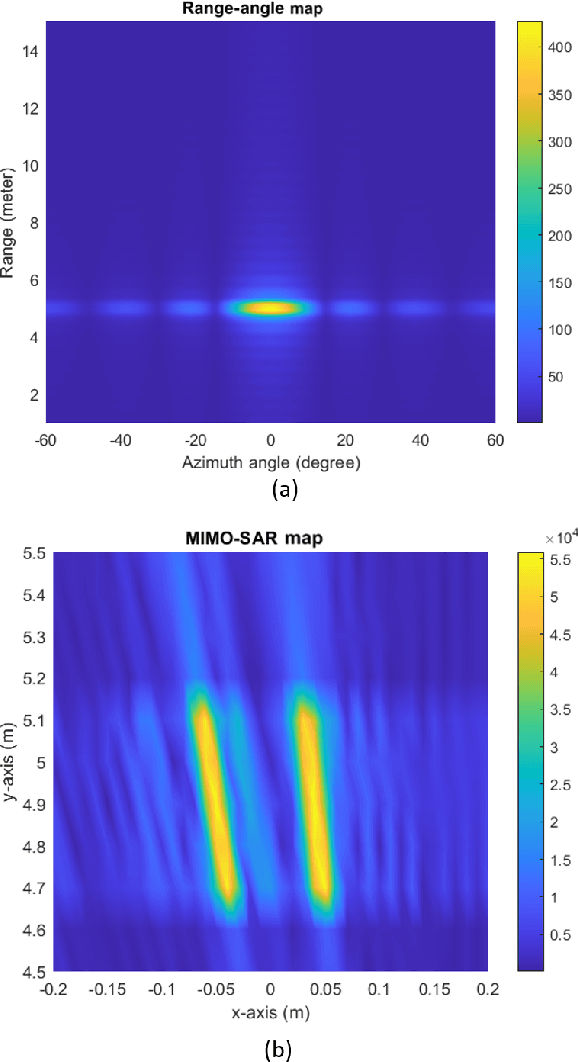
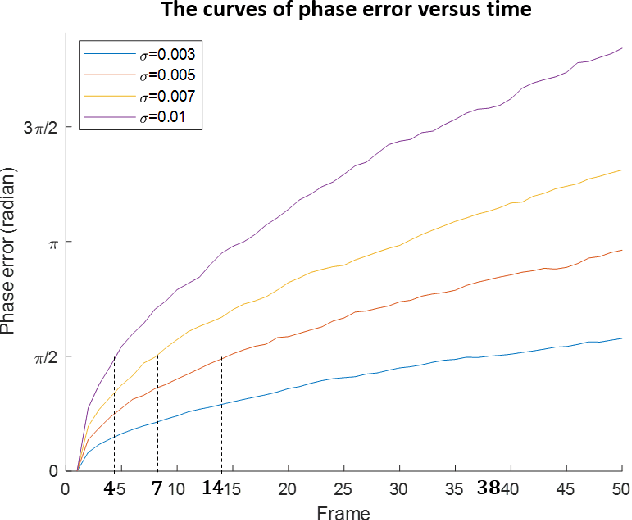
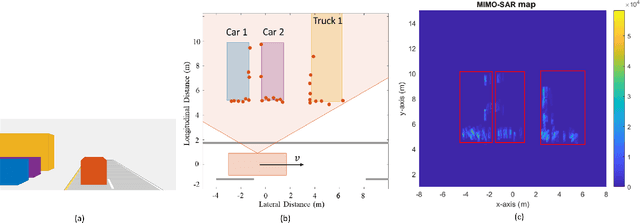
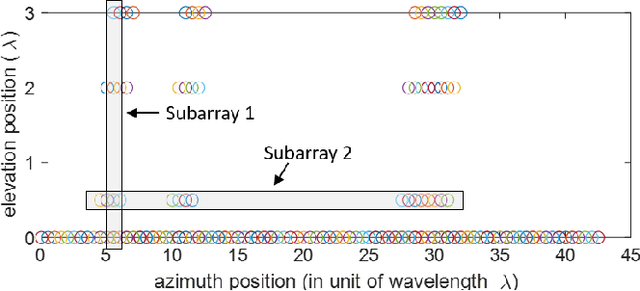
Millimeter-wave radars are being increasingly integrated into commercial vehicles to support advanced driver-assistance system features. A key shortcoming for present-day vehicular radar imaging is poor azimuth resolution (for side-looking operation) due to the form factor limits on antenna size and placement. In this paper, we propose a solution via a new multiple-input and multiple-output synthetic aperture radar (MIMO-SAR) imaging technique, that applies coherent SAR principles to vehicular MIMO radar to improve the side-view (angular) resolution. The proposed 2-stage hierarchical MIMO-SAR processing workflow drastically reduces the computation load while preserving image resolution. To enable coherent processing over the synthetic aperture, we integrate a radar odometry algorithm that estimates the trajectory of ego-radar. The MIMO-SAR algorithm is validated by both simulations and real experiment data collected by a vehicle-mounted radar platform (see Fig. 1).
RAMP-CNN: A Novel Neural Network for Enhanced Automotive Radar Object Recognition
Nov 13, 2020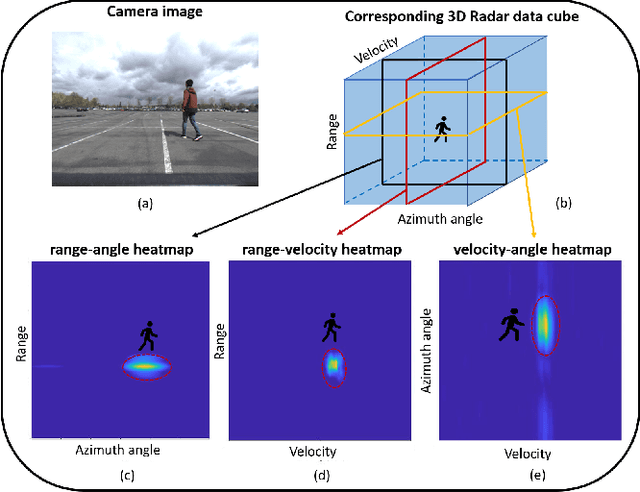
Millimeter-wave (mmW) radars are being increasingly integrated into commercial vehicles to support new advanced driver-assistance systems (ADAS) by enabling robust and high-performance object detection, localization, as well as recognition - a key component of new environmental perception. In this paper, we propose a novel radar multiple-perspectives convolutional neural network (RAMP-CNN) that extracts the location and class of objects based on further processing of the range-velocity-angle (RVA) heatmap sequences. To bypass the complexity of 4D convolutional neural networks (NN), we propose to combine several lower-dimension NN models within our RAMP-CNN model that nonetheless approaches the performance upper-bound with lower complexity. The extensive experiments show that the proposed RAMP-CNN model achieves better average recall (AR) and average precision (AP) than prior works in all testing scenarios (see Table. III). Besides, the RAMP-CNN model is validated to work robustly under the nighttime, which enables low-cost radars as a potential substitute for pure optical sensing under severe conditions.
* 15 pages