 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAPTR: Radar-based 3D Pose Estimation using Transformer
Nov 11, 2025Radar-based indoor 3D human pose estimation typically relied on fine-grained 3D keypoint labels, which are costly to obtain especially in complex indoor settings involving clutter, occlusions, or multiple people. In this paper, we propose \textbf{RAPTR} (RAdar Pose esTimation using tRansformer) under weak supervision, using only 3D BBox and 2D keypoint labels which are considerably easier and more scalable to collect. Our RAPTR is characterized by a two-stage pose decoder architecture with a pseudo-3D deformable attention to enhance (pose/joint) queries with multi-view radar features: a pose decoder estimates initial 3D poses with a 3D template loss designed to utilize the 3D BBox labels and mitigate depth ambiguities; and a joint decoder refines the initial poses with 2D keypoint labels and a 3D gravity loss. Evaluated on two indoor radar datasets, RAPTR outperforms existing methods, reducing joint position error by $34.3\%$ on HIBER and $76.9\%$ on MMVR. Our implementation is available at https://github.com/merlresearch/radar-pose-transformer.
RETR: Multi-View Radar Detection Transformer for Indoor Perception
Nov 15, 2024



Indoor radar perception has seen rising interest due to affordable costs driven by emerging automotive imaging radar developments and the benefits of reduced privacy concerns and reliability under hazardous conditions (e.g., fire and smoke). However, existing radar perception pipelines fail to account for distinctive characteristics of the multi-view radar setting. In this paper, we propose Radar dEtection TRansformer (RETR), an extension of the popular DETR architecture, tailored for multi-view radar perception. RETR inherits the advantages of DETR, eliminating the need for hand-crafted components for object detection and segmentation in the image plane. More importantly, RETR incorporates carefully designed modifications such as 1) depth-prioritized feature similarity via a tunable positional encoding (TPE); 2) a tri-plane loss from both radar and camera coordinates; and 3) a learnable radar-to-camera transformation via reparameterization, to account for the unique multi-view radar setting. Evaluated on two indoor radar perception datasets, our approach outperforms existing state-of-the-art methods by a margin of 15.38+ AP for object detection and 11.77+ IoU for instance segmentation, respectively.
SIRA: Scalable Inter-frame Relation and Association for Radar Perception
Nov 04, 2024



Conventional radar feature extraction faces limitations due to low spatial resolution, noise, multipath reflection, the presence of ghost targets, and motion blur. Such limitations can be exacerbated by nonlinear object motion, particularly from an ego-centric viewpoint. It becomes evident that to address these challenges, the key lies in exploiting temporal feature relation over an extended horizon and enforcing spatial motion consistency for effective association. To this end, this paper proposes SIRA (Scalable Inter-frame Relation and Association) with two designs. First, inspired by Swin Transformer, we introduce extended temporal relation, generalizing the existing temporal relation layer from two consecutive frames to multiple inter-frames with temporally regrouped window attention for scalability. Second, we propose motion consistency track with the concept of a pseudo-tracklet generated from observational data for better trajectory prediction and subsequent object association. Our approach achieves 58.11 mAP@0.5 for oriented object detection and 47.79 MOTA for multiple object tracking on the Radiate dataset, surpassing previous state-of-the-art by a margin of +4.11 mAP@0.5 and +9.94 MOTA, respectively.
Multi-Band Wi-Fi Neural Dynamic Fusion
Jul 17, 2024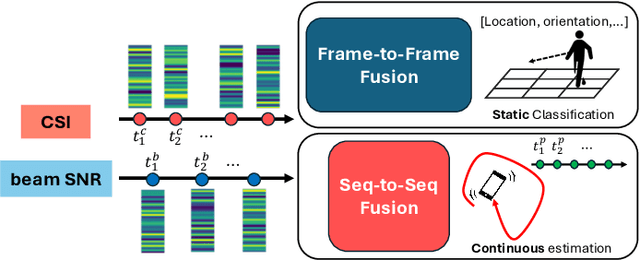
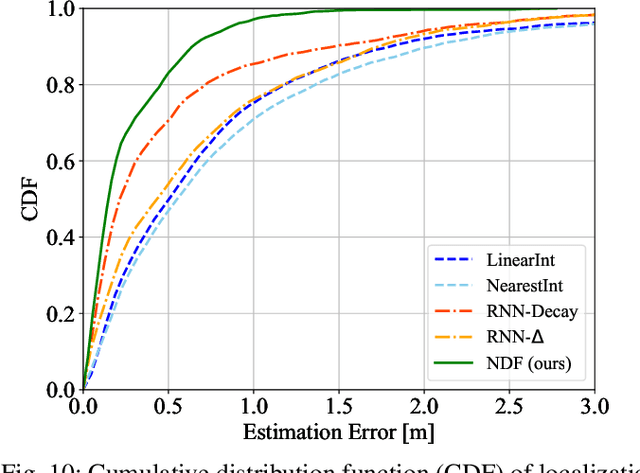
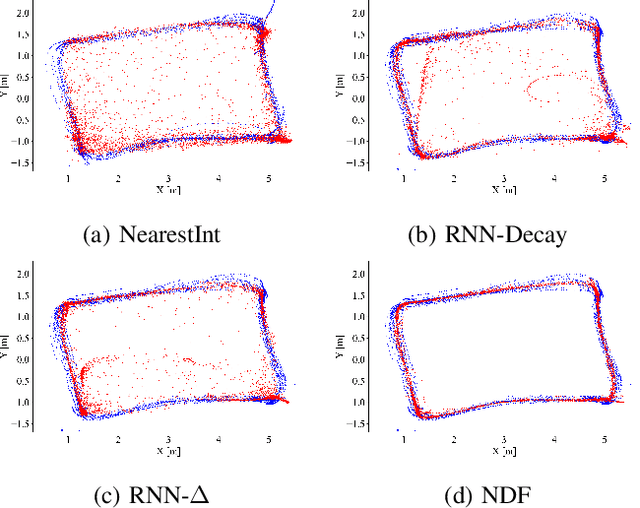

Wi-Fi channel measurements across different bands, e.g., sub-7-GHz and 60-GHz bands, are asynchronous due to the uncoordinated nature of distinct standards protocols, e.g., 802.11ac/ax/be and 802.11ad/ay. Multi-band Wi-Fi fusion has been considered before on a frame-to-frame basis for simple classification tasks, which does not require fine-time-scale alignment. In contrast, this paper considers asynchronous sequence-to-sequence fusion between sub-7-GHz channel state information (CSI) and 60-GHz beam signal-to-noise-ratio~(SNR)s for more challenging tasks such as continuous coordinate estimation. To handle the timing disparity between asynchronous multi-band Wi-Fi channel measurements, this paper proposes a multi-band neural dynamic fusion (NDF) framework. This framework uses separate encoders to embed the multi-band Wi-Fi measurement sequences to separate initial latent conditions. Using a continuous-time ordinary differential equation (ODE) modeling, these initial latent conditions are propagated to respective latent states of the multi-band channel measurements at the same time instances for a latent alignment and a post-ODE fusion, and at their original time instances for measurement reconstruction. We derive a customized loss function based on the variational evidence lower bound (ELBO) that balances between the multi-band measurement reconstruction and continuous coordinate estimation. We evaluate the NDF framework using an in-house multi-band Wi-Fi testbed and demonstrate substantial performance improvements over a comprehensive list of single-band and multi-band baseline methods.
MMVR: Millimeter-wave Multi-View Radar Dataset and Benchmark for Indoor Perception
Jun 15, 2024



Compared with an extensive list of automotive radar datasets that support autonomous driving, indoor radar datasets are scarce at a smaller scale in the format of low-resolution radar point clouds and usually under an open-space single-room setting. In this paper, we scale up indoor radar data collection using multi-view high-resolution radar heatmap in a multi-day, multi-room, and multi-subject setting, with an emphasis on the diversity of environment and subjects. Referred to as the millimeter-wave multi-view radar (MMVR) dataset, it consists of $345$K multi-view radar frames collected from $25$ human subjects over $6$ different rooms, $446$K annotated bounding boxes/segmentation instances, and $7.59$ million annotated keypoints to support three major perception tasks of object detection, pose estimation, and instance segmentation, respectively. For each task, we report performance benchmarks under two protocols: a single subject in an open space and multiple subjects in several cluttered rooms with two data splits: random split and cross-environment split over $395$ 1-min data segments. We anticipate that MMVR facilitates indoor radar perception development for indoor vehicle (robot/humanoid) navigation, building energy management, and elderly care for better efficiency, user experience, and safety.
Mutual Interference Mitigation for MIMO-FMCW Automotive Radar
Apr 06, 2023



This paper considers mutual interference mitigation among automotive radars using frequency-modulated continuous wave (FMCW) signal and multiple-input multiple-output (MIMO) virtual arrays. For the first time, we derive a general interference signal model that fully accounts for not only the time-frequency incoherence, e.g., different FMCW configuration parameters and time offsets, but also the slow-time code MIMO incoherence and array configuration differences between the victim and interfering radars. Along with a standard MIMO-FMCW object signal model, we turn the interference mitigation into a spatial-domain object detection under incoherent MIMO-FMCW interference described by the explicit interference signal model, and propose a constant false alarm rate (CFAR) detector. More specifically, the proposed detector exploits the structural property of the derived interference model at both \emph{transmit} and \emph{receive} steering vector space. We also derive analytical closed-form expressions for probabilities of detection and false alarm. Performance evaluation using both synthetic-level and phased array system-level simulation confirms the effectiveness of our proposed detector over selected baseline methods.
Greedy Sparsity-Constrained Optimization
Jan 06, 2013Sparsity-constrained optimization has wide applicability in machine learning, statistics, and signal processing problems such as feature selection and compressive Sensing. A vast body of work has studied the sparsity-constrained optimization from theoretical, algorithmic, and application aspects in the context of sparse estimation in linear models where the fidelity of the estimate is measured by the squared error. In contrast, relatively less effort has been made in the study of sparsity-constrained optimization in cases where nonlinear models are involved or the cost function is not quadratic. In this paper we propose a greedy algorithm, Gradient Support Pursuit (GraSP), to approximate sparse minima of cost functions of arbitrary form. Should a cost function have a Stable Restricted Hessian (SRH) or a Stable Restricted Linearization (SRL), both of which are introduced in this paper, our algorithm is guaranteed to produce a sparse vector within a bounded distance from the true sparse optimum. Our approach generalizes known results for quadratic cost functions that arise in sparse linear regression and Compressive Sensing. We also evaluate the performance of GraSP through numerical simulations on synthetic data, where the algorithm is employed for sparse logistic regression with and without $\ell_2$-regularization.