 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable Neighborhood Search for the Electric Vehicle Routing Problem
Nov 11, 2025The Electric Vehicle Routing Problem (EVRP) extends the classical Vehicle Routing Problem (VRP) to reflect the growing use of electric and hybrid vehicles in logistics. Due to the variety of constraints considered in the literature, comparing approaches across different problem variants remains challenging. A minimalistic variant of the EVRP, known as the Capacitated Green Vehicle Routing Problem (CGVRP), was the focus of the CEC-12 competition held during the 2020 IEEE World Congress on Computational Intelligence. This paper presents the competition-winning approach, based on the Variable Neighborhood Search (VNS) metaheuristic. The method achieves the best results on the full competition dataset and also outperforms a more recent algorithm published afterward.
Detailed Aerial Mapping of Photovoltaic Power Plants Through Semantically Significant Keypoints
Oct 06, 2025An accurate and up-to-date model of a photovoltaic (PV) power plant is essential for its optimal operation and maintenance. However, such a model may not be easily available. This work introduces a novel approach for PV power plant mapping based on aerial overview images. It enables the automation of the mapping process while removing the reliance on third-party data. The presented mapping method takes advantage of the structural layout of the power plants to achieve detailed modeling down to the level of individual PV modules. The approach relies on visual segmentation of PV modules in overview images and the inference of structural information in each image, assigning modules to individual benches, rows, and columns. We identify visual keypoints related to the layout and use these to merge detections from multiple images while maintaining their structural integrity. The presented method was experimentally verified and evaluated on two different power plants. The final fusion of 3D positions and semantic structures results in a compact georeferenced model suitable for power plant maintenance.
Multi-Platform Teach-and-Repeat Navigation by Visual Place Recognition Based on Deep-Learned Local Features
Mar 17, 2025



Uniform and variable environments still remain a challenge for stable visual localization and mapping in mobile robot navigation. One of the possible approaches suitable for such environments is appearance-based teach-and-repeat navigation, relying on simplified localization and reactive robot motion control - all without a need for standard mapping. This work brings an innovative solution to such a system based on visual place recognition techniques. Here, the major contributions stand in the employment of a new visual place recognition technique, a novel horizontal shift computation approach, and a multi-platform system design for applications across various types of mobile robots. Secondly, a new public dataset for experimental testing of appearance-based navigation methods is introduced. Moreover, the work also provides real-world experimental testing and performance comparison of the introduced navigation system against other state-of-the-art methods. The results confirm that the new system outperforms existing methods in several testing scenarios, is capable of operation indoors and outdoors, and exhibits robustness to day and night scene variations.
Visual Localization via Semantic Structures in Autonomous Photovoltaic Power Plant Inspection
Jan 24, 2025



Inspection systems utilizing unmanned aerial vehicles (UAVs) equipped with thermal cameras are increasingly popular for the maintenance of photovoltaic (PV) power plants. However, automation of the inspection task is a challenging problem as it requires precise navigation to capture images from optimal distances and viewing angles. This paper presents a novel localization pipeline that directly integrates PV module detection with UAV navigation, allowing precise positioning during inspection. Detections are used to identify the power plant structures in the image and associate these with the power plant model. We define visually recognizable anchor points for the initial association and use object tracking to discern global associations. We present three distinct methods for visual segmentation of PV modules based on traditional computer vision, deep learning, and their fusion, and we evaluate their performance in relation to the proposed localization pipeline. The presented methods were verified and evaluated using custom aerial inspection data sets, demonstrating their robustness and applicability for real-time navigation. Additionally, we evaluate the influence of the power plant model's precision on the localization methods.
On Model-Free Re-ranking for Visual Place Recognition with Deep Learned Local Features
Oct 24, 2024



Re-ranking is the second stage of a visual place recognition task, in which the system chooses the best-matching images from a pre-selected subset of candidates. Model-free approaches compute the image pair similarity based on a spatial comparison of corresponding local visual features, eliminating the need for computationally expensive estimation of a model describing transformation between images. The article focuses on model-free re-ranking based on standard local visual features and their applicability in long-term autonomy systems. It introduces three new model-free re-ranking methods that were designed primarily for deep-learned local visual features. These features evince high robustness to various appearance changes, which stands as a crucial property for use with long-term autonomy systems. All the introduced methods were employed in a new visual place recognition system together with the D2-net feature detector (Dusmanu, 2019) and experimentally tested with diverse, challenging public datasets. The obtained results are on par with current state-of-the-art methods, affirming that model-free approaches are a viable and worthwhile path for long-term visual place recognition.
An Integrated Approach to Goal Selection in Mobile Robot Exploration
Jul 20, 2020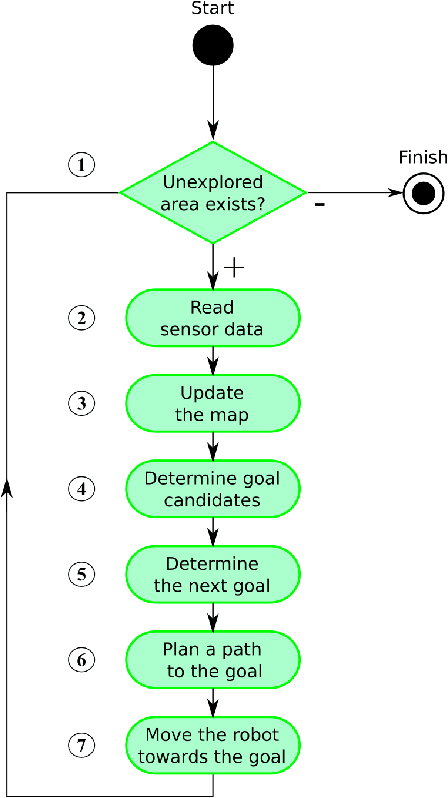
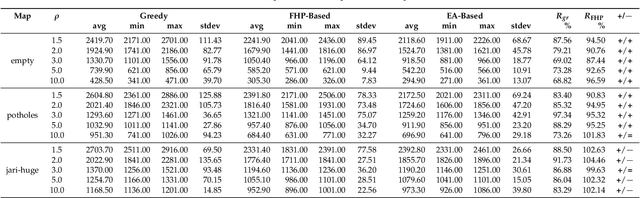
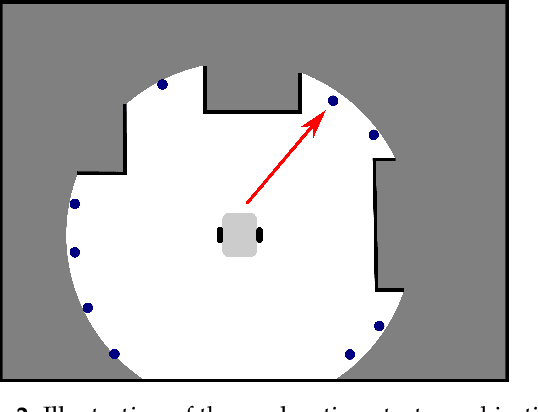
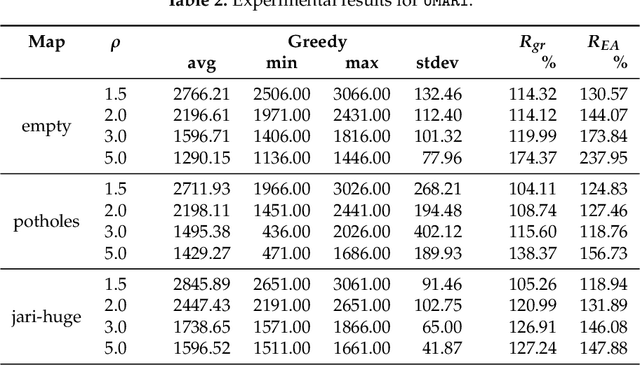
This paper deals with the problem of autonomous navigation of a mobile robot in an unknown 2D environment to fully explore the environment as efficiently as possible. We assume a terrestrial mobile robot equipped with a ranging sensor with a limited range and 360 degrees field of view. The key part of the exploration process is formulated as the d-Watchman Route Problem which consists of two coupled tasks - candidate goals generation and finding an optimal path through a subset of goals - which are solved in each exploration step. The latter has been defined as a constrained variant of the Generalized Traveling Salesman Problem and solved using an evolutionary algorithm. An evolutionary algorithm that uses an indirect representation and the nearest neighbor based constructive procedure was proposed to solve this problem. Individuals evolved in this evolutionary algorithm do not directly code the solutions to the problem. Instead, they represent sequences of instructions to construct a feasible solution. The problems with efficiently generating feasible solutions typically arising when applying traditional evolutionary algorithms to constrained optimization problems are eliminated this way. The proposed exploration framework was evaluated in a simulated environment on three maps and the time needed to explore the whole environment was compared to state-of-the-art exploration methods. Experimental results show that our method outperforms the compared ones in environments with a low density of obstacles by up to 12.5%, while it is slightly worse in office-like environments by 4.5% at maximum. The framework has also been deployed on a real robot to demonstrate the applicability of the proposed solution with real hardware.
Wearable camera-based human absolute localization in large warehouses
Jul 20, 2020In a robotised warehouse, as in any place where robots move autonomously, a major issue is the localization or detection of human operators during their intervention in the work area of the robots. This paper introduces a wearable human localization system for large warehouses, which utilize preinstalled infrastructure used for localization of automated guided vehicles (AGVs). A monocular down-looking camera is detecting ground nodes, identifying them and computing the absolute position of the human to allow safe cooperation and coexistence of humans and AGVs in the same workspace. A virtual safety area around the human operator is set up and any AGV in this area is immediately stopped. In order to avoid triggering an emergency stop because of the short distance between robots and human operators, the trajectories of the robots have to be modified so that they do not interfere with the human. The purpose of this paper is to demonstrate an absolute visual localization method working in the challenging environment of an automated warehouse with low intensity of light, massively changing environment and using solely monocular camera placed on the human body.
* Conference paper presented at Twelfth International Conference on Machine Vision, 2019
Modelling, Simulation, and Planning for the MoleMOD System
Jul 20, 2020
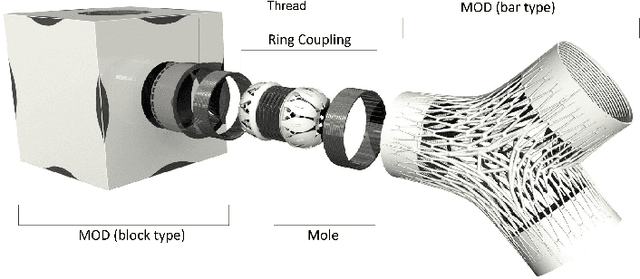
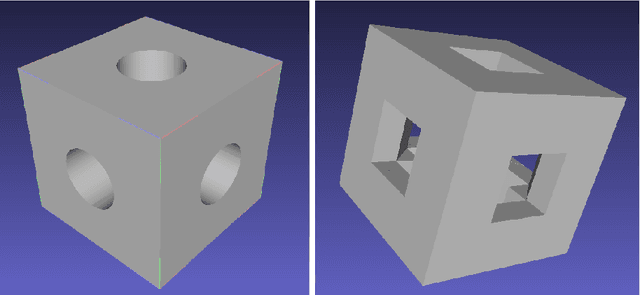
MoleMOD is a heterogeneous self-reconfigurable modular robotic system to be employed in architecture and civil engineering. In this paper we present two components of the MoleMOD infrastructure - a test environment and a planning algorithm. The test environment for simulation and visualization of active parts as well as passive blocks of MoleMOD is based on Gazebo - a powerful general-purpose robotic simulator. The key effort has been put into preparation of realistic models of passive and active components taking into account their physical characteristics. Moreover, given a starting configuration of the MoleMOD system and a final configuration an approach to plan collision-free trajectories for a fleet of active parts is introduced.
On Randomized Searching for Multi-robot Coordination
Jul 20, 2020
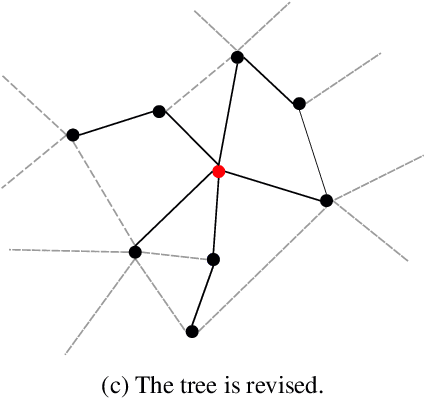
In this chapter, we propose a novel approach for solving the coordination of a fleet of mobile robots, which consists of finding a set of collision-free trajectories for individual robots in the fleet. This problem is studied for several decades, and many approaches have been introduced. However, only a small minority is applicable in practice because of their properties - small computational requirement, producing solutions near-optimum, and completeness. The approach we present is based on a multi-robot variant of Rapidly Exploring Random Tree algorithm (RRT) for discrete environments and significantly improves its performance. Although the solutions generated by the approach are slightly worse than one of the best state-of-the-art algorithms presented in [23], it solves problems where ter Morses algorithm fails.
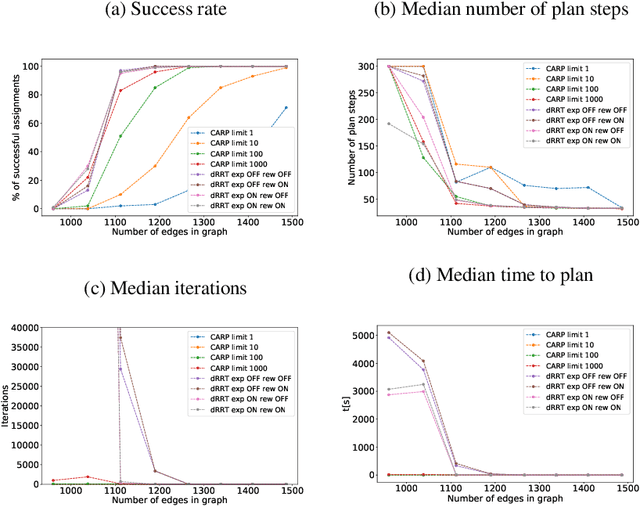
Human Intention Recognition for Human Aware Planning in Integrated Warehouse Systems
May 22, 2020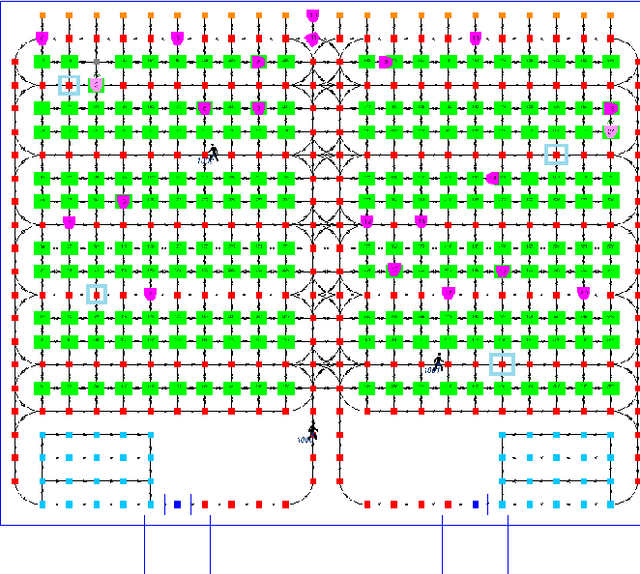
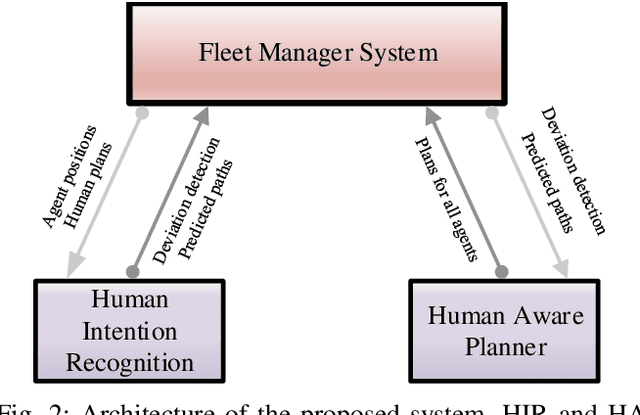
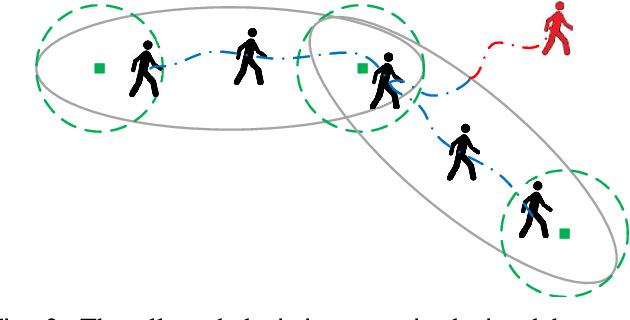
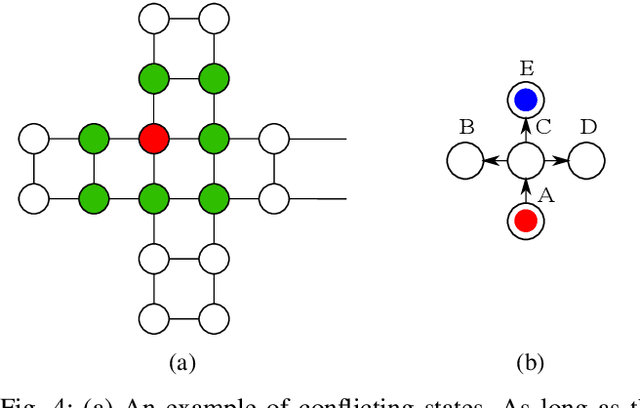
With the substantial growth of logistics businesses the need for larger and more automated warehouses increases, thus giving rise to fully robotized shop-floors with mobile robots in charge of transporting and distributing goods. However, even in fully automatized warehouse systems the need for human intervention frequently arises, whether because of maintenance or because of fulfilling specific orders, thus bringing mobile robots and humans ever closer in an integrated warehouse environment. In order to ensure smooth and efficient operation of such a warehouse, paths of both robots and humans need to be carefully planned; however, due to the possibility of humans deviating from the assigned path, this becomes an even more challenging task. Given that, the supervising system should be able to recognize human intentions and its alternative paths in real-time. In this paper, we propose a framework for human deviation detection and intention recognition which outputs the most probable paths of the humans workers and the planner that acts accordingly by replanning for robots to move out of the human's path. Experimental results demonstrate that the proposed framework increases total number of deliveries, especially human deliveries, and reduces human-robot encounters.