 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Randomized Searching for Multi-robot Coordination
Jul 20, 2020
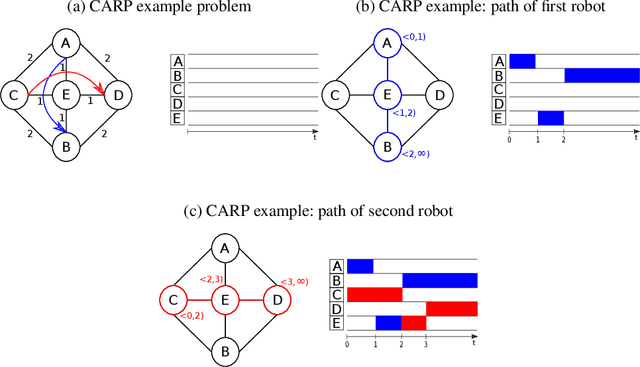
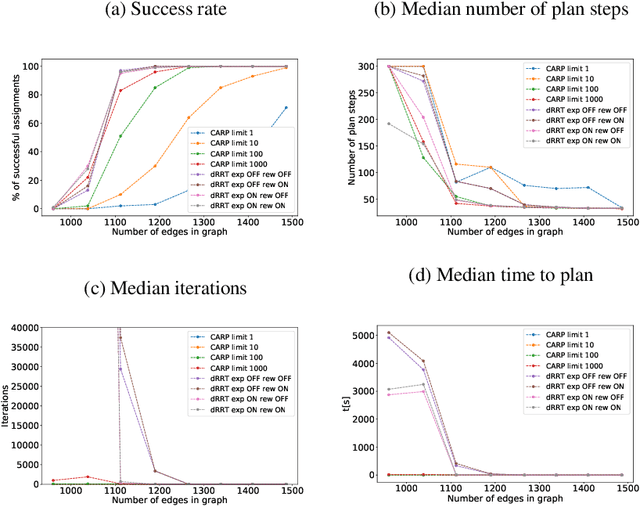
In this chapter, we propose a novel approach for solving the coordination of a fleet of mobile robots, which consists of finding a set of collision-free trajectories for individual robots in the fleet. This problem is studied for several decades, and many approaches have been introduced. However, only a small minority is applicable in practice because of their properties - small computational requirement, producing solutions near-optimum, and completeness. The approach we present is based on a multi-robot variant of Rapidly Exploring Random Tree algorithm (RRT) for discrete environments and significantly improves its performance. Although the solutions generated by the approach are slightly worse than one of the best state-of-the-art algorithms presented in [23], it solves problems where ter Morses algorithm fails.
Human Intention Recognition for Human Aware Planning in Integrated Warehouse Systems
May 22, 2020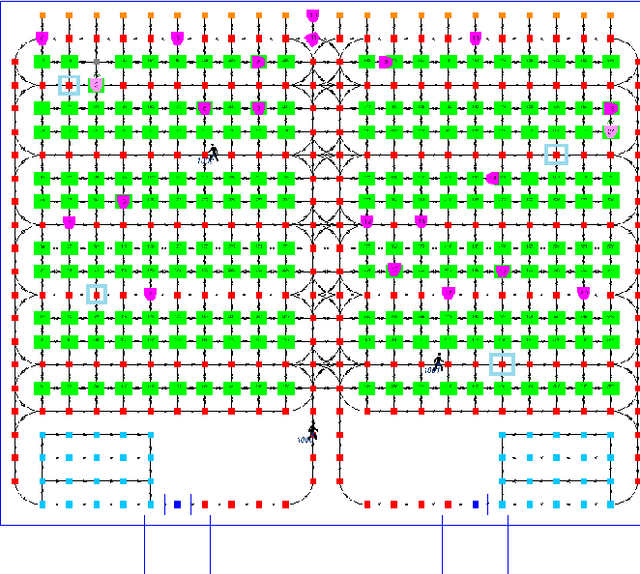
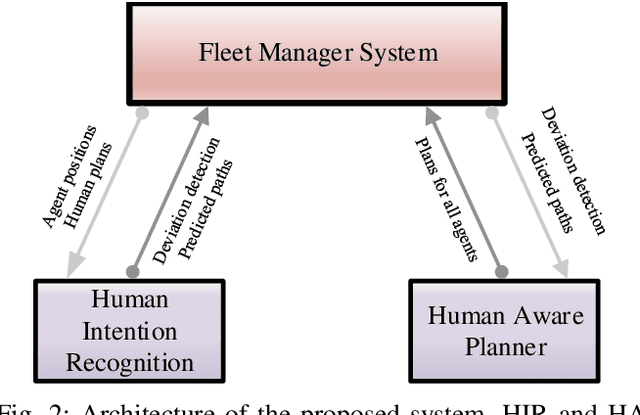
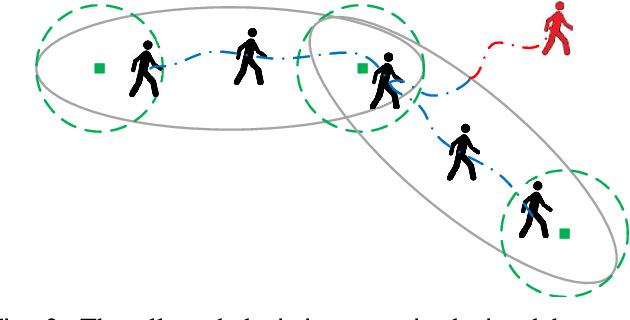
With the substantial growth of logistics businesses the need for larger and more automated warehouses increases, thus giving rise to fully robotized shop-floors with mobile robots in charge of transporting and distributing goods. However, even in fully automatized warehouse systems the need for human intervention frequently arises, whether because of maintenance or because of fulfilling specific orders, thus bringing mobile robots and humans ever closer in an integrated warehouse environment. In order to ensure smooth and efficient operation of such a warehouse, paths of both robots and humans need to be carefully planned; however, due to the possibility of humans deviating from the assigned path, this becomes an even more challenging task. Given that, the supervising system should be able to recognize human intentions and its alternative paths in real-time. In this paper, we propose a framework for human deviation detection and intention recognition which outputs the most probable paths of the humans workers and the planner that acts accordingly by replanning for robots to move out of the human's path. Experimental results demonstrate that the proposed framework increases total number of deliveries, especially human deliveries, and reduces human-robot encounters.
Context-Aware Route Planning for Automated Warehouses
Jan 22, 2019
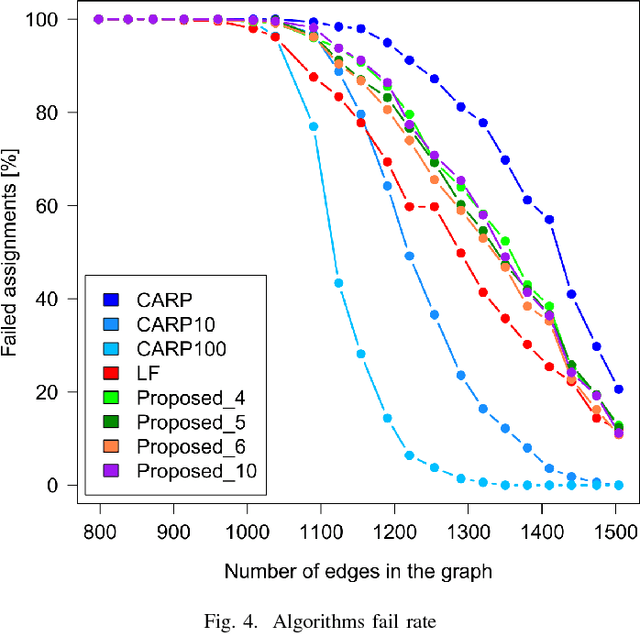
In order to ensure efficient flow of goods in an automated warehouse and to guarantee its continuous distribution to/from picking stations in an effective way, decisions about which goods will be delivered to which particular picking station by which robot and by which path and in which time have to be made based on the current state of the warehouse. This task involves solution of two suproblems: (1) task allocation in which an assignment of robots to goods they have to deliver at a particular time is found and (2) planning of collision-free trajectories for particular robots (given their actual and goal positions). The trajectory planning problem is addressed in this paper taking into account specifics of automated warehouses. First, assignments of all robots are not known in advance, they are instead presented to the algorithm gradually one by one. Moreover, we do not optimize a makespan, but a throughput - the sum of individual robot plan costs. We introduce a novel approach to this problem which is based on the context-aware route planning algorithm [1]. The performed experimental results show that the proposed approach has a lower fail rate and produces results of higher quality than the original algorithm. This is redeemed by higher computational complexity which is nevertheless low enough for real-time planning.
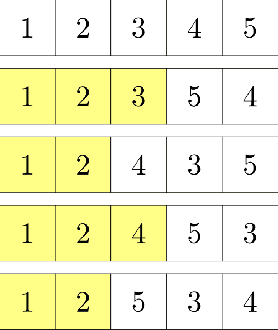
Improved Discrete RRT for Coordinated Multi-robot Planning
Jan 22, 2019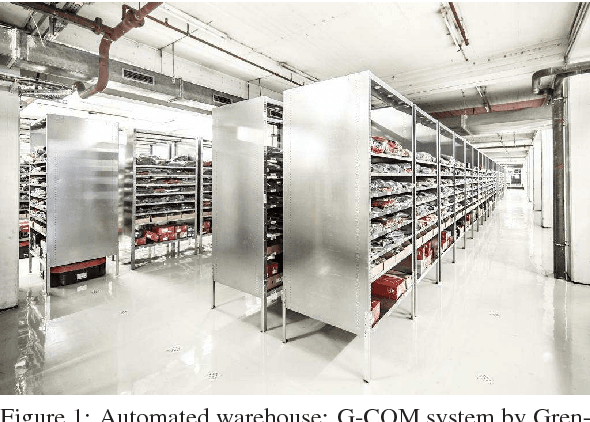
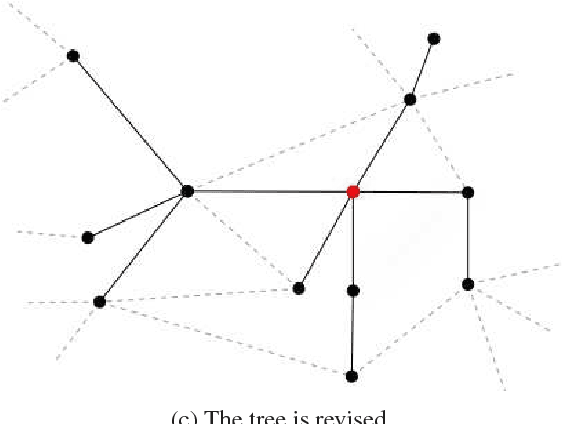
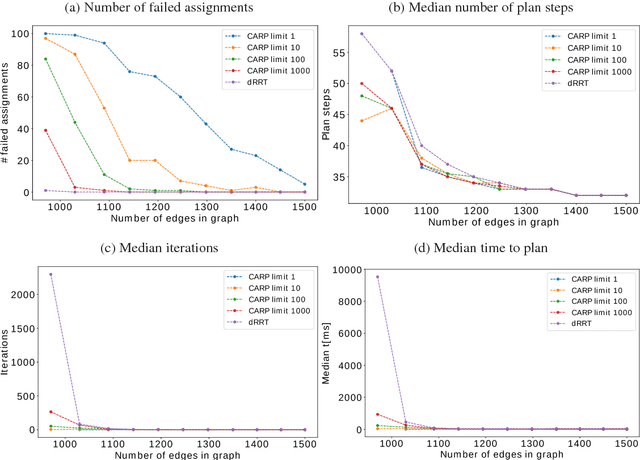

This paper addresses the problem of coordination of a fleet of mobile robots - the problem of finding an optimal set of collision-free trajectories for individual robots in the fleet. Many approaches have been introduced during the last decades, but a minority of them is practically applicable, i.e. fast, producing near-optimal solutions, and complete. We propose a novel probabilistic approach based on the Rapidly Exploring Random Tree algorithm (RRT) by significantly improving its multi-robot variant for discrete environments. The presented experimental results show that the proposed approach is fast enough to solve problems with tens of robots in seconds. Although the solutions generated by the approach are slightly worse than one of the best state-of-the-art algorithms presented in (ter Mors et al., 2010), it solves problems where ter Mors's algorithm fails.