 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Intention Recognition for Human Aware Planning in Integrated Warehouse Systems
Paper and Code
May 22, 2020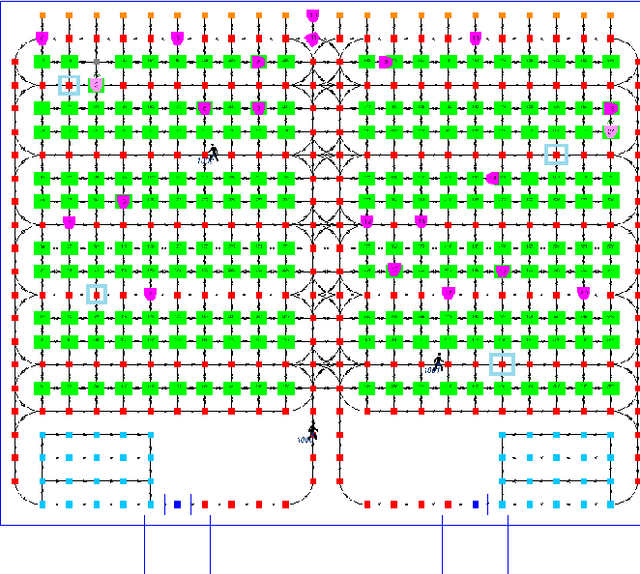
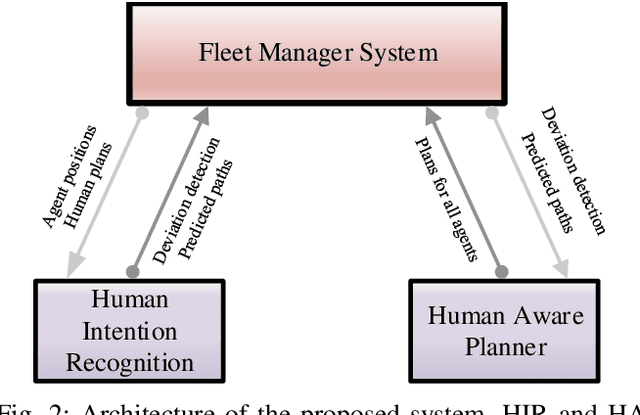
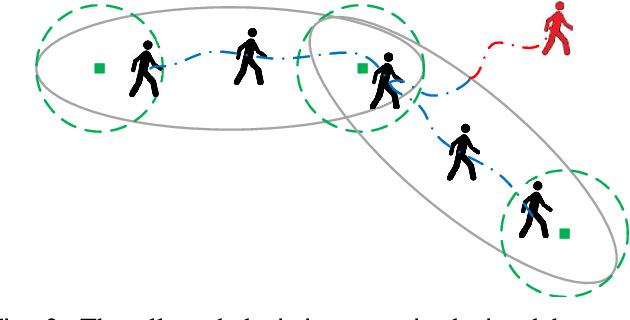
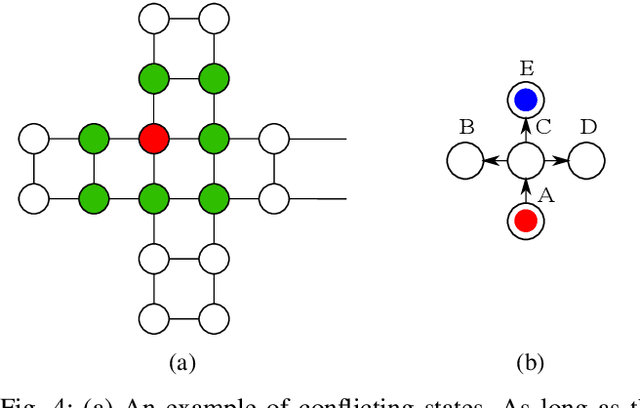
With the substantial growth of logistics businesses the need for larger and more automated warehouses increases, thus giving rise to fully robotized shop-floors with mobile robots in charge of transporting and distributing goods. However, even in fully automatized warehouse systems the need for human intervention frequently arises, whether because of maintenance or because of fulfilling specific orders, thus bringing mobile robots and humans ever closer in an integrated warehouse environment. In order to ensure smooth and efficient operation of such a warehouse, paths of both robots and humans need to be carefully planned; however, due to the possibility of humans deviating from the assigned path, this becomes an even more challenging task. Given that, the supervising system should be able to recognize human intentions and its alternative paths in real-time. In this paper, we propose a framework for human deviation detection and intention recognition which outputs the most probable paths of the humans workers and the planner that acts accordingly by replanning for robots to move out of the human's path. Experimental results demonstrate that the proposed framework increases total number of deliveries, especially human deliveries, and reduces human-robot encounters.