Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling, Simulation, and Planning for the MoleMOD System
Paper and Code
Jul 20, 2020
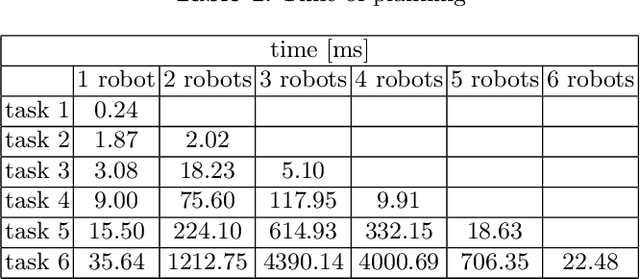
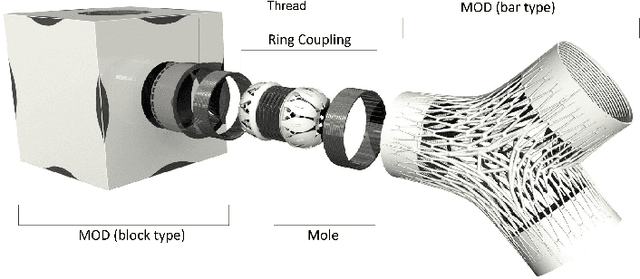
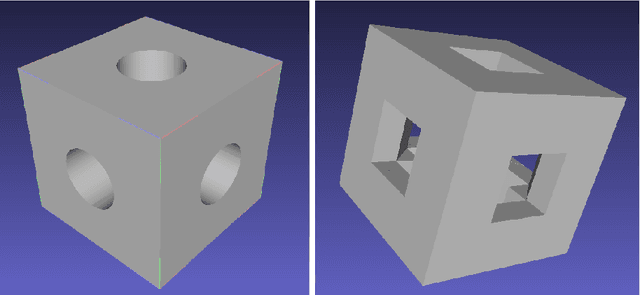
MoleMOD is a heterogeneous self-reconfigurable modular robotic system to be employed in architecture and civil engineering. In this paper we present two components of the MoleMOD infrastructure - a test environment and a planning algorithm. The test environment for simulation and visualization of active parts as well as passive blocks of MoleMOD is based on Gazebo - a powerful general-purpose robotic simulator. The key effort has been put into preparation of realistic models of passive and active components taking into account their physical characteristics. Moreover, given a starting configuration of the MoleMOD system and a final configuration an approach to plan collision-free trajectories for a fleet of active parts is introduced.
* Modelling and Simulation for Autonomous Systems. MESAS 2018.
Lecture Notes in Computer Science
View paper on