 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn multi-robot search for a stationary object
Paper and Code
Jan 22, 2019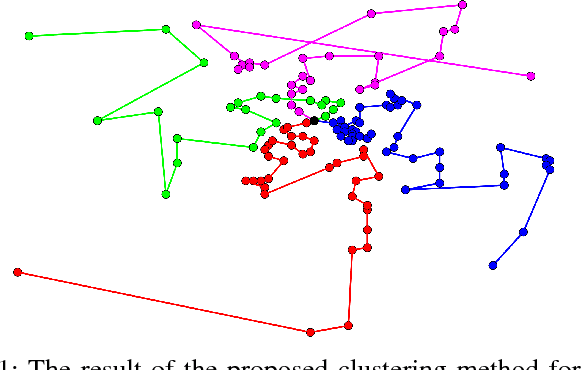


Two variants of multi-robot search for a stationary object in a priori known environment represented by a graph are studied in the paper. The first one is a generalization of the Traveling Deliveryman Problem where more than one deliveryman is allowed to be used in a solution. Similarly, the second variant is a generalization of the Graph Search Problem. A novel heuristics suitable for both problems is proposed which is furthermore integrated into a cluster-first route second approach. A set of computational experiments was conducted over the benchmark instances derived from the TSPLIB library. The results obtained show that even a standalone heuristics significantly outperforms the standard solution based on k- means clustering in quality of results as well as computational time. The integrated approach furthermore improves solutions found by a standalone heuristics by up to 15% at the expense of higher computational complexity.