 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI for Urban Design: A Stepwise Approach Integrating Human Expertise with Multimodal Diffusion Models
May 30, 2025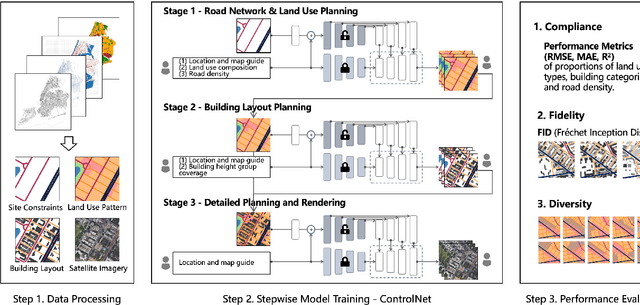
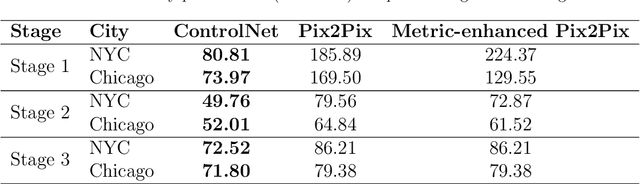
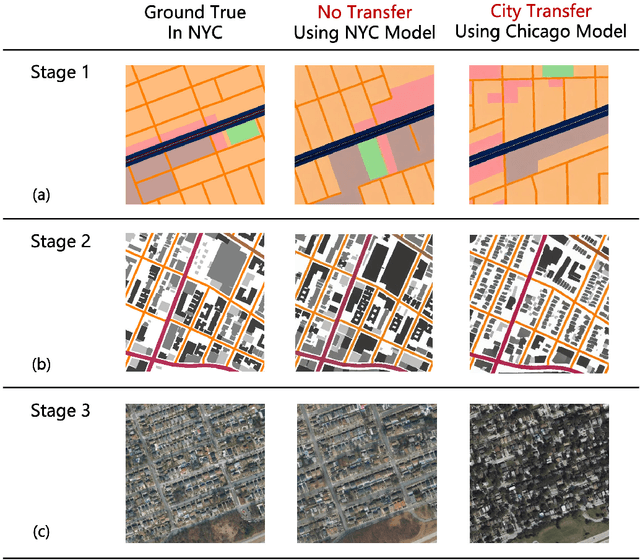
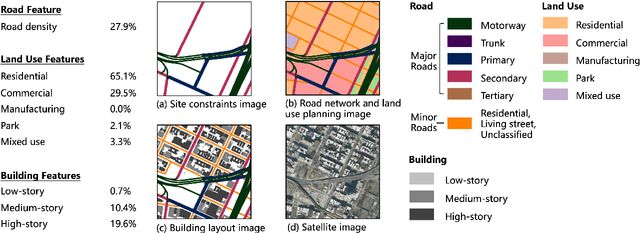
Urban design is a multifaceted process that demands careful consideration of site-specific constraints and collaboration among diverse professionals and stakeholders. The advent of generative artificial intelligence (GenAI) offers transformative potential by improving the efficiency of design generation and facilitating the communication of design ideas. However, most existing approaches are not well integrated with human design workflows. They often follow end-to-end pipelines with limited control, overlooking the iterative nature of real-world design. This study proposes a stepwise generative urban design framework that integrates multimodal diffusion models with human expertise to enable more adaptive and controllable design processes. Instead of generating design outcomes in a single end-to-end process, the framework divides the process into three key stages aligned with established urban design workflows: (1) road network and land use planning, (2) building layout planning, and (3) detailed planning and rendering. At each stage, multimodal diffusion models generate preliminary designs based on textual prompts and image-based constraints, which can then be reviewed and refined by human designers. We design an evaluation framework to assess the fidelity, compliance, and diversity of the generated designs. Experiments using data from Chicago and New York City demonstrate that our framework outperforms baseline models and end-to-end approaches across all three dimensions. This study underscores the benefits of multimodal diffusion models and stepwise generation in preserving human control and facilitating iterative refinements, laying the groundwork for human-AI interaction in urban design solutions.
A Robust Deep Learning Method with Uncertainty Estimation for the Pathological Classification of Renal Cell Carcinoma based on CT Images
Nov 12, 2023



Objectives To develop and validate a deep learning-based diagnostic model incorporating uncertainty estimation so as to facilitate radiologists in the preoperative differentiation of the pathological subtypes of renal cell carcinoma (RCC) based on CT images. Methods Data from 668 consecutive patients, pathologically proven RCC, were retrospectively collected from Center 1. By using five-fold cross-validation, a deep learning model incorporating uncertainty estimation was developed to classify RCC subtypes into clear cell RCC (ccRCC), papillary RCC (pRCC), and chromophobe RCC (chRCC). An external validation set of 78 patients from Center 2 further evaluated the model's performance. Results In the five-fold cross-validation, the model's area under the receiver operating characteristic curve (AUC) for the classification of ccRCC, pRCC, and chRCC was 0.868 (95% CI: 0.826-0.923), 0.846 (95% CI: 0.812-0.886), and 0.839 (95% CI: 0.802-0.88), respectively. In the external validation set, the AUCs were 0.856 (95% CI: 0.838-0.882), 0.787 (95% CI: 0.757-0.818), and 0.793 (95% CI: 0.758-0.831) for ccRCC, pRCC, and chRCC, respectively. Conclusions The developed deep learning model demonstrated robust performance in predicting the pathological subtypes of RCC, while the incorporated uncertainty emphasized the importance of understanding model confidence, which is crucial for assisting clinical decision-making for patients with renal tumors. Clinical relevance statement Our deep learning approach, integrated with uncertainty estimation, offers clinicians a dual advantage: accurate RCC subtype predictions complemented by diagnostic confidence references, promoting informed decision-making for patients with RCC.
Towards Complex and Continuous Manipulation: A Gesture Based Anthropomorphic Robotic Hand Design
Dec 20, 2020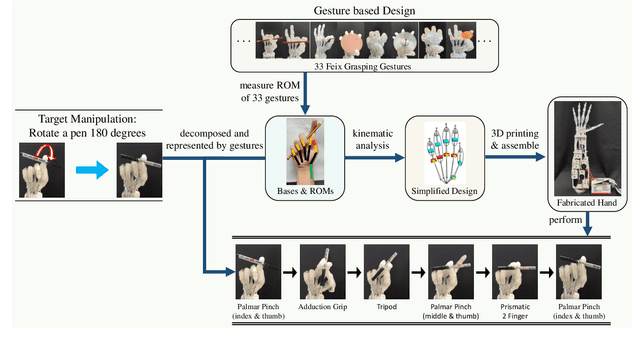
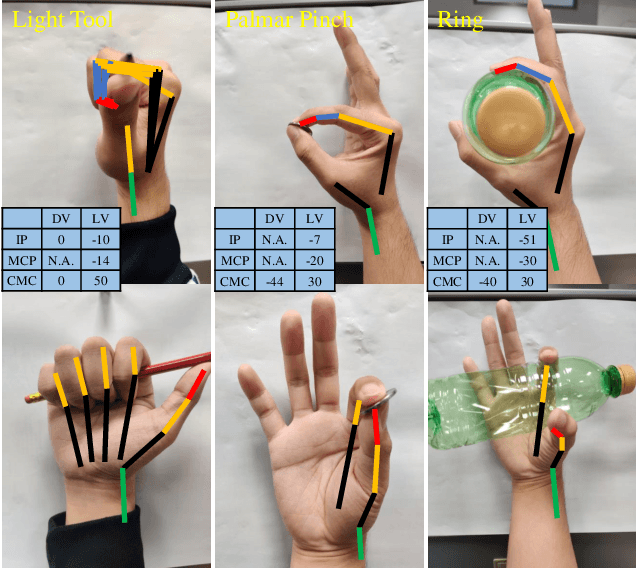
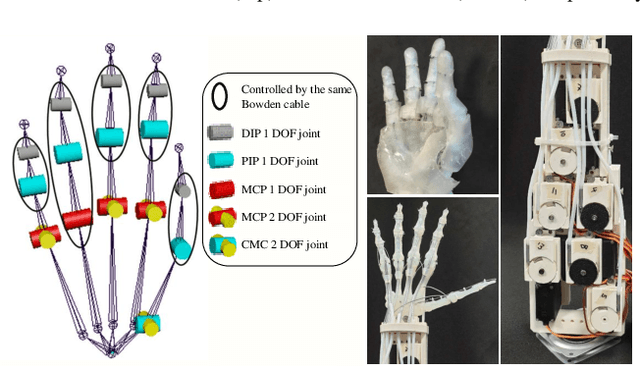
Most current anthropomorphic robotic hands can realize part of the human hand functions, particularly for object grasping. However, due to the complexity of the human hand, few current designs target at daily object manipulations, even for simple actions like rotating a pen. To tackle this problem, we introduce a gesture based framework, which adopts the widely-used 33 grasping gestures of Feix as the bases for hand design and implementation of manipulation. In the proposed framework, we first measure the motion ranges of human fingers for each gesture, and based on the results, we propose a simple yet dexterous robotic hand design with 13 degrees of freedom. Furthermore, we adopt a frame interpolation based method, in which we consider the base gestures as the key frames to represent a manipulation task, and use the simple linear interpolation strategy to accomplish the manipulation. To demonstrate the effectiveness of our framework, we define a three-level benchmark, which includes not only 62 test gestures from previous research, but also multiple complex and continuous actions. Experimental results on this benchmark validate the dexterity of the proposed design and our video is available in \url{https://entuedu-my.sharepoint.com/:v:/g/personal/hanhui_li_staff_main_ntu_edu_sg/Ean2GpnFo6JPjIqbKy1KHMEBftgCkcDhnSX-9uLZ6T0rUg?e=ppCGbC}
Fast 3D Modeling of Anthropomorphic Robotic Hands Based on A Multi-layer Deformable Design
Nov 07, 2020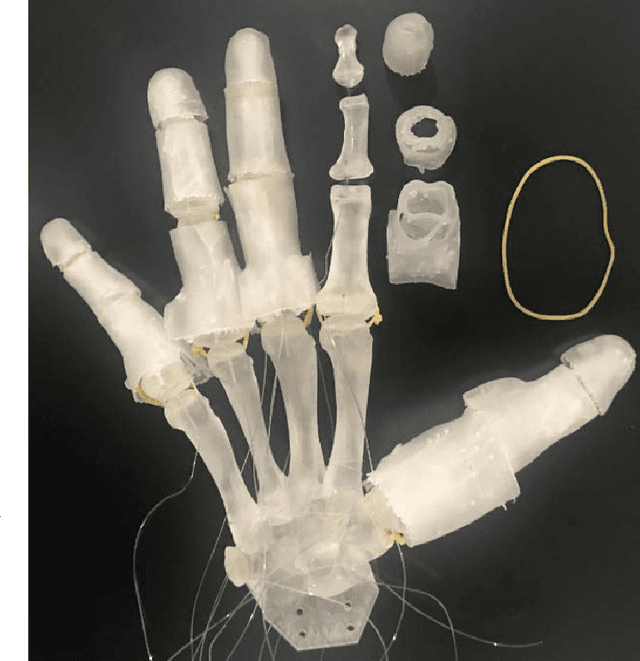
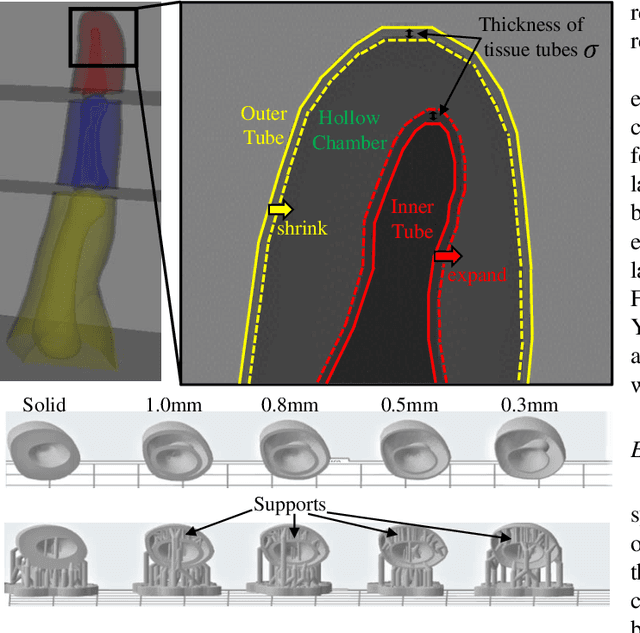
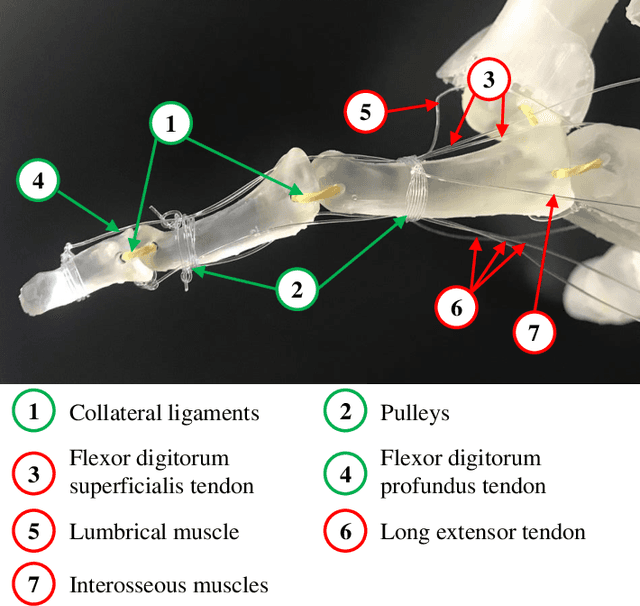
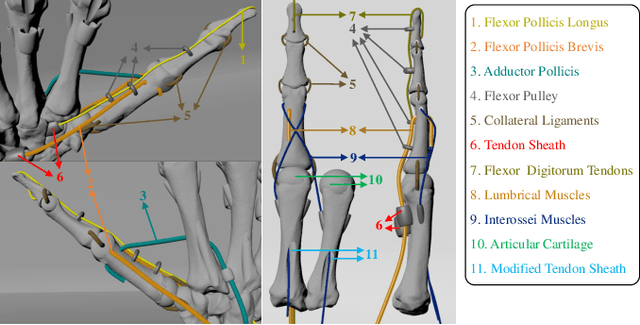
Current anthropomorphic robotic hands mainly focus on improving their dexterity by devising new mechanical structures and actuation systems. However, most of them rely on a single structure/system (e.g., bone-only) and ignore the fact that the human hand is composed of multiple functional structures (e.g., skin, bones, muscles, and tendons). This not only increases the difficulty of the design process but also lowers the robustness and flexibility of the fabricated hand. Besides, other factors like customization, the time and cost for production, and the degree of resemblance between human hands and robotic hands, remain omitted. To tackle these problems, this study proposes a 3D printable multi-layer design that models the hand with the layers of skin, tissues, and bones. The proposed design first obtains the 3D surface model of a target hand via 3D scanning, and then generates the 3D bone models from the surface model based on a fast template matching method. To overcome the disadvantage of the rigid bone layer in deformation, the tissue layer is introduced and represented by a concentric tube based structure, of which the deformability can be explicitly controlled by a parameter. Besides, a low-cost yet effective underactuated system is adopted to drive the fabricated hand. The proposed design is tested with 33 widely used object grasping types, as well as special objects like fragile silken tofu, and outperforms previous designs remarkably. With the proposed design, anthropomorphic robotic hands can be produced fast with low cost, and be customizable and deformable.
Learning Discriminative Representations for Fine-Grained Diabetic Retinopathy Grading
Nov 04, 2020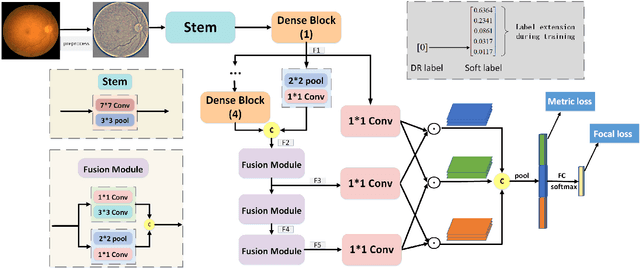
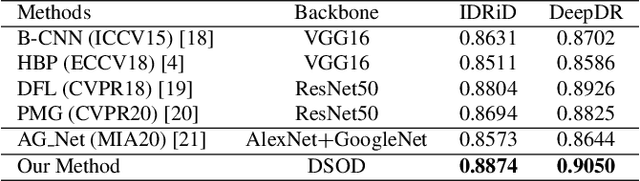
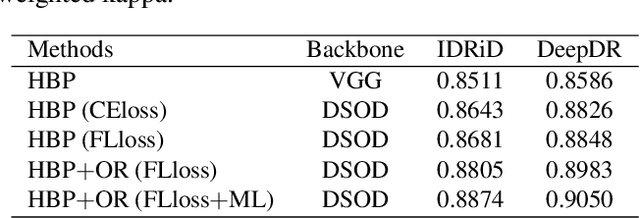
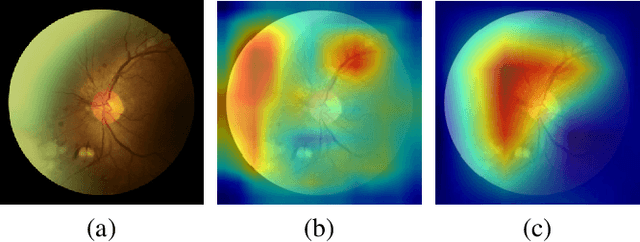
Diabetic retinopathy (DR) is one of the leading causes of blindness. However, no specific symptoms of early DR lead to a delayed diagnosis, which results in disease progression in patients. To determine the disease severity levels, ophthalmologists need to focus on the discriminative parts of the fundus images. In recent years, deep learning has achieved great success in medical image analysis. However, most works directly employ algorithms based on convolutional neural networks (CNNs), which ignore the fact that the difference among classes is subtle and gradual. Hence, we consider automatic image grading of DR as a fine-grained classification task, and construct a bilinear model to identify the pathologically discriminative areas. In order to leverage the ordinal information among classes, we use an ordinal regression method to obtain the soft labels. In addition, other than only using a categorical loss to train our network, we also introduce the metric loss to learn a more discriminative feature space. Experimental results demonstrate the superior performance of the proposed method on two public IDRiD and DeepDR datasets.
Don't Overlook the Support Set: Towards Improving Generalization in Meta-learning
Jul 26, 2020

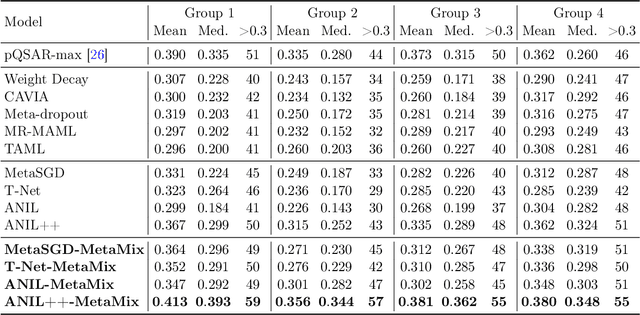
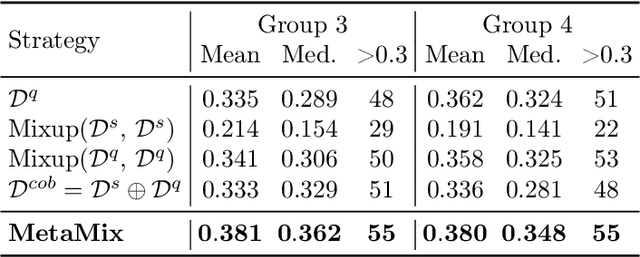
Meta-learning has proven to be a powerful paradigm for transferring the knowledge from previously tasks to facilitate the learning of a novel task. Current dominant algorithms train a well-generalized model initialization which is adapted to each task via the support set. The crux, obviously, lies in optimizing the generalization capability of the initialization, which is measured by the performance of the adapted model on the query set of each task. Unfortunately, this generalization measure, evidenced by empirical results, pushes the initialization to overfit the query but fail the support set, which significantly impairs the generalization and adaptation to novel tasks. To address this issue, we include the support set when evaluating the generalization to produce a new meta-training strategy, MetaMix, that linearly combines the input and hidden representations of samples from both the support and query sets. Theoretical studies on classification and regression tasks show how MetaMix can improve the generalization of meta-learning. More remarkably, MetaMix obtains state-of-the-art results by a large margin across many datasets and remains compatible with existing meta-learning algorithms.
Inverse Projection Representation and Category Contribution Rate for Robust Tumor Recognition
Feb 09, 2019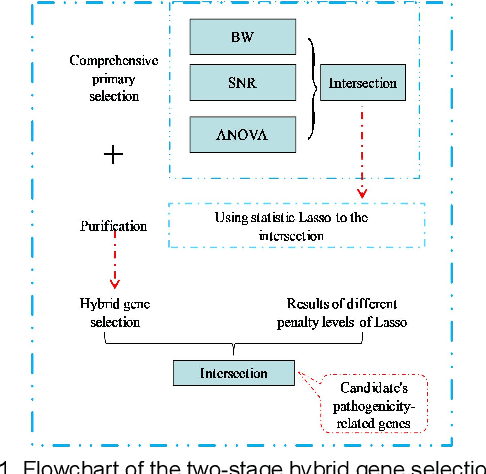
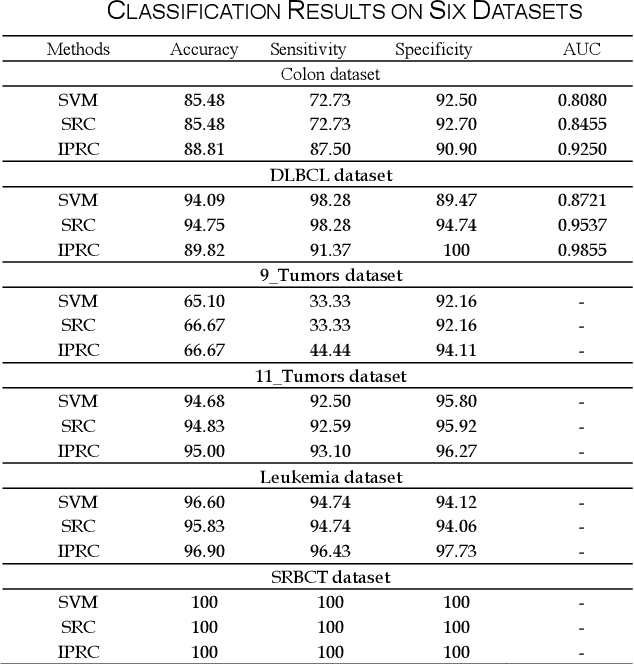

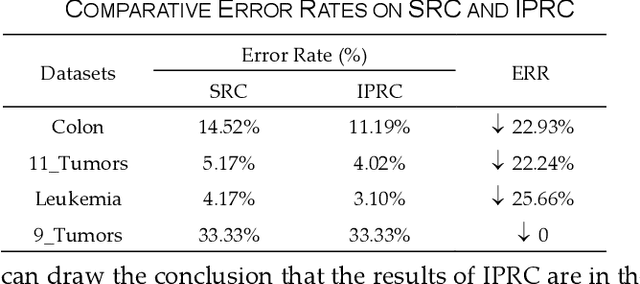
Sparse representation based classification (SRC) methods have achieved remarkable results. SRC, however, still suffer from requiring enough training samples, insufficient use of test samples and instability of representation. In this paper, a stable inverse projection representation based classification (IPRC) is presented to tackle these problems by effectively using test samples. An IPR is firstly proposed and its feasibility and stability are analyzed. A classification criterion named category contribution rate is constructed to match the IPR and complete classification. Moreover, a statistical measure is introduced to quantify the stability of representation-based classification methods. Based on the IPRC technique, a robust tumor recognition framework is presented by interpreting microarray gene expression data, where a two-stage hybrid gene selection method is introduced to select informative genes. Finally, the functional analysis of candidate's pathogenicity-related genes is given. Extensive experiments on six public tumor microarray gene expression datasets demonstrate the proposed technique is competitive with state-of-the-art methods.
* 14 pages, 19 figures, 10 tables