 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Complex and Continuous Manipulation: A Gesture Based Anthropomorphic Robotic Hand Design
Paper and Code
Dec 20, 2020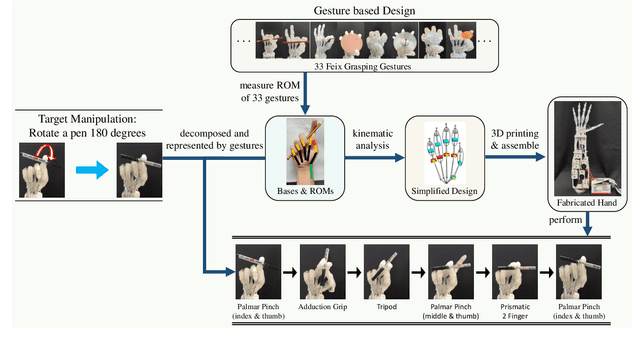
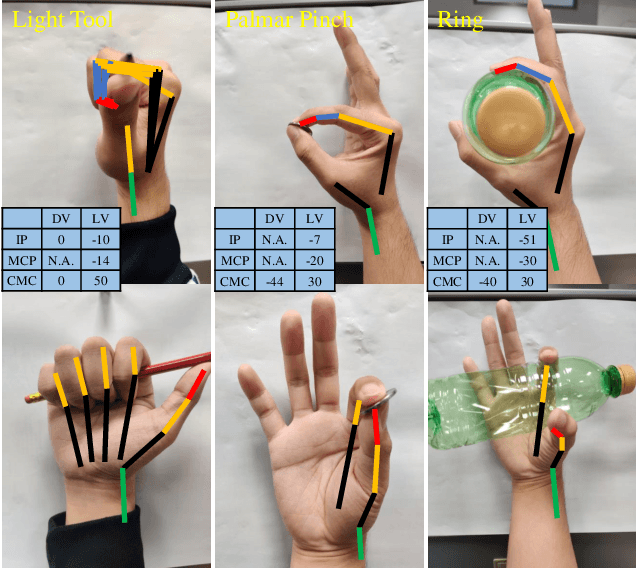
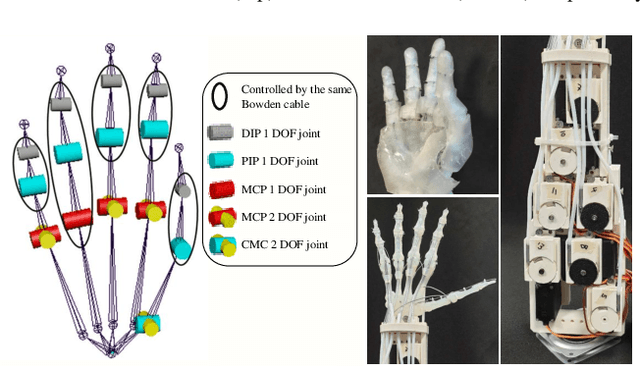
Most current anthropomorphic robotic hands can realize part of the human hand functions, particularly for object grasping. However, due to the complexity of the human hand, few current designs target at daily object manipulations, even for simple actions like rotating a pen. To tackle this problem, we introduce a gesture based framework, which adopts the widely-used 33 grasping gestures of Feix as the bases for hand design and implementation of manipulation. In the proposed framework, we first measure the motion ranges of human fingers for each gesture, and based on the results, we propose a simple yet dexterous robotic hand design with 13 degrees of freedom. Furthermore, we adopt a frame interpolation based method, in which we consider the base gestures as the key frames to represent a manipulation task, and use the simple linear interpolation strategy to accomplish the manipulation. To demonstrate the effectiveness of our framework, we define a three-level benchmark, which includes not only 62 test gestures from previous research, but also multiple complex and continuous actions. Experimental results on this benchmark validate the dexterity of the proposed design and our video is available in \url{https://entuedu-my.sharepoint.com/:v:/g/personal/hanhui_li_staff_main_ntu_edu_sg/Ean2GpnFo6JPjIqbKy1KHMEBftgCkcDhnSX-9uLZ6T0rUg?e=ppCGbC}