 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOneFlowSBI: One Model, Many Queries for Simulation-Based Inference
Jan 30, 2026We introduce \textit{OneFlowSBI}, a unified framework for simulation-based inference that learns a single flow-matching generative model over the joint distribution of parameters and observations. Leveraging a query-aware masking distribution during training, the same model supports multiple inference tasks, including posterior sampling, likelihood estimation, and arbitrary conditional distributions, without task-specific retraining. We evaluate \textit{OneFlowSBI} on ten benchmark inference problems and two high-dimensional real-world inverse problems across multiple simulation budgets. \textit{OneFlowSBI} is shown to deliver competitive performance against state-of-the-art generalized inference solvers and specialized posterior estimators, while enabling efficient sampling with few ODE integration steps and remaining robust under noisy and partially observed data.
OpenNovelty: An LLM-powered Agentic System for Verifiable Scholarly Novelty Assessment
Jan 04, 2026Evaluating novelty is critical yet challenging in peer review, as reviewers must assess submissions against a vast, rapidly evolving literature. This report presents OpenNovelty, an LLM-powered agentic system for transparent, evidence-based novelty analysis. The system operates through four phases: (1) extracting the core task and contribution claims to generate retrieval queries; (2) retrieving relevant prior work based on extracted queries via semantic search engine; (3) constructing a hierarchical taxonomy of core-task-related work and performing contribution-level full-text comparisons against each contribution; and (4) synthesizing all analyses into a structured novelty report with explicit citations and evidence snippets. Unlike naive LLM-based approaches, \textsc{OpenNovelty} grounds all assessments in retrieved real papers, ensuring verifiable judgments. We deploy our system on 500+ ICLR 2026 submissions with all reports publicly available on our website, and preliminary analysis suggests it can identify relevant prior work, including closely related papers that authors may overlook. OpenNovelty aims to empower the research community with a scalable tool that promotes fair, consistent, and evidence-backed peer review.
Exploiting the Asymmetric Uncertainty Structure of Pre-trained VLMs on the Unit Hypersphere
May 16, 2025Vision-language models (VLMs) as foundation models have significantly enhanced performance across a wide range of visual and textual tasks, without requiring large-scale training from scratch for downstream tasks. However, these deterministic VLMs fail to capture the inherent ambiguity and uncertainty in natural language and visual data. Recent probabilistic post-hoc adaptation methods address this by mapping deterministic embeddings onto probability distributions; however, existing approaches do not account for the asymmetric uncertainty structure of the modalities, and the constraint that meaningful deterministic embeddings reside on a unit hypersphere, potentially leading to suboptimal performance. In this paper, we address the asymmetric uncertainty structure inherent in textual and visual data, and propose AsymVLM to build probabilistic embeddings from pre-trained VLMs on the unit hypersphere, enabling uncertainty quantification. We validate the effectiveness of the probabilistic embeddings on established benchmarks, and present comprehensive ablation studies demonstrating the inherent nature of asymmetry in the uncertainty structure of textual and visual data.
PARIC: Probabilistic Attention Regularization for Language Guided Image Classification from Pre-trained Vison Language Models
Mar 14, 2025



Language-guided attention frameworks have significantly enhanced both interpretability and performance in image classification; however, the reliance on deterministic embeddings from pre-trained vision-language foundation models to generate reference attention maps frequently overlooks the intrinsic multivaluedness and ill-posed characteristics of cross-modal mappings. To address these limitations, we introduce PARIC, a probabilistic framework for guiding visual attention via language specifications. Our approach enables pre-trained vision-language models to generate probabilistic reference attention maps, which align textual and visual modalities more effectively while incorporating uncertainty estimates, as compared to their deterministic counterparts. Experiments on benchmark test problems demonstrate that PARIC enhances prediction accuracy, mitigates bias, ensures consistent predictions, and improves robustness across various datasets.
GraphBridge: Towards Arbitrary Transfer Learning in GNNs
Feb 26, 2025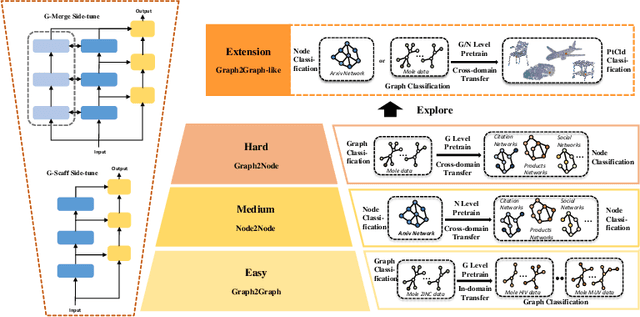
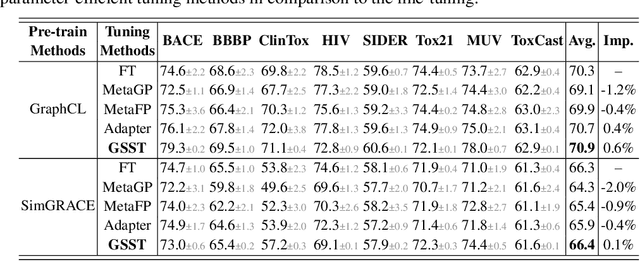
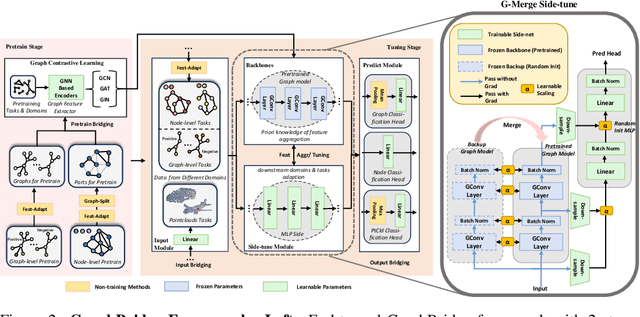
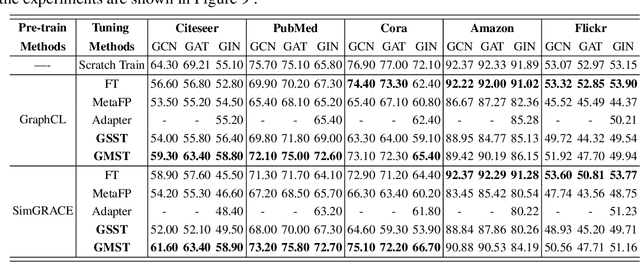
Graph neural networks (GNNs) are conventionally trained on a per-domain, per-task basis. It creates a significant barrier in transferring the acquired knowledge to different, heterogeneous data setups. This paper introduces GraphBridge, a novel framework to enable knowledge transfer across disparate tasks and domains in GNNs, circumventing the need for modifications to task configurations or graph structures. Specifically, GraphBridge allows for the augmentation of any pre-trained GNN with prediction heads and a bridging network that connects the input to the output layer. This architecture not only preserves the intrinsic knowledge of the original model but also supports outputs of arbitrary dimensions. To mitigate the negative transfer problem, GraphBridg merges the source model with a concurrently trained model, thereby reducing the source bias when applied to the target domain. Our method is thoroughly evaluated across diverse transfer learning scenarios, including Graph2Graph, Node2Node, Graph2Node, and graph2point-cloud. Empirical validation, conducted over 16 datasets representative of these scenarios, confirms the framework's capacity for task- and domain-agnostic transfer learning within graph-like data, marking a significant advancement in the field of GNNs.
$\texttt{InfoHier}$: Hierarchical Information Extraction via Encoding and Embedding
Jan 15, 2025



Analyzing large-scale datasets, especially involving complex and high-dimensional data like images, is particularly challenging. While self-supervised learning (SSL) has proven effective for learning representations from unlabelled data, it typically focuses on flat, non-hierarchical structures, missing the multi-level relationships present in many real-world datasets. Hierarchical clustering (HC) can uncover these relationships by organizing data into a tree-like structure, but it often relies on rigid similarity metrics that struggle to capture the complexity of diverse data types. To address these we envision $\texttt{InfoHier}$, a framework that combines SSL with HC to jointly learn robust latent representations and hierarchical structures. This approach leverages SSL to provide adaptive representations, enhancing HC's ability to capture complex patterns. Simultaneously, it integrates HC loss to refine SSL training, resulting in representations that are more attuned to the underlying information hierarchy. $\texttt{InfoHier}$ has the potential to improve the expressiveness and performance of both clustering and representation learning, offering significant benefits for data analysis, management, and information retrieval.
Towards Scenario Generalization for Vision-based Roadside 3D Object Detection
Jan 29, 2024



Roadside perception can greatly increase the safety of autonomous vehicles by extending their perception ability beyond the visual range and addressing blind spots. However, current state-of-the-art vision-based roadside detection methods possess high accuracy on labeled scenes but have inferior performance on new scenes. This is because roadside cameras remain stationary after installation and can only collect data from a single scene, resulting in the algorithm overfitting these roadside backgrounds and camera poses. To address this issue, in this paper, we propose an innovative Scenario Generalization Framework for Vision-based Roadside 3D Object Detection, dubbed SGV3D. Specifically, we employ a Background-suppressed Module (BSM) to mitigate background overfitting in vision-centric pipelines by attenuating background features during the 2D to bird's-eye-view projection. Furthermore, by introducing the Semi-supervised Data Generation Pipeline (SSDG) using unlabeled images from new scenes, diverse instance foregrounds with varying camera poses are generated, addressing the risk of overfitting specific camera poses. We evaluate our method on two large-scale roadside benchmarks. Our method surpasses all previous methods by a significant margin in new scenes, including +42.57% for vehicle, +5.87% for pedestrian, and +14.89% for cyclist compared to BEVHeight on the DAIR-V2X-I heterologous benchmark. On the larger-scale Rope3D heterologous benchmark, we achieve notable gains of 14.48% for car and 12.41% for large vehicle. We aspire to contribute insights on the exploration of roadside perception techniques, emphasizing their capability for scenario generalization. The code will be available at {\url{ https://github.com/yanglei18/SGV3D}}
Deep Graph Reprogramming
Apr 28, 2023



In this paper, we explore a novel model reusing task tailored for graph neural networks (GNNs), termed as "deep graph reprogramming". We strive to reprogram a pre-trained GNN, without amending raw node features nor model parameters, to handle a bunch of cross-level downstream tasks in various domains. To this end, we propose an innovative Data Reprogramming paradigm alongside a Model Reprogramming paradigm. The former one aims to address the challenge of diversified graph feature dimensions for various tasks on the input side, while the latter alleviates the dilemma of fixed per-task-per-model behavior on the model side. For data reprogramming, we specifically devise an elaborated Meta-FeatPadding method to deal with heterogeneous input dimensions, and also develop a transductive Edge-Slimming as well as an inductive Meta-GraPadding approach for diverse homogenous samples. Meanwhile, for model reprogramming, we propose a novel task-adaptive Reprogrammable-Aggregator, to endow the frozen model with larger expressive capacities in handling cross-domain tasks. Experiments on fourteen datasets across node/graph classification/regression, 3D object recognition, and distributed action recognition, demonstrate that the proposed methods yield gratifying results, on par with those by re-training from scratch.
Accelerating Fair Federated Learning: Adaptive Federated Adam
Jan 23, 2023



Federated learning is a distributed and privacy-preserving approach to train a statistical model collaboratively from decentralized data of different parties. However, when datasets of participants are not independent and identically distributed (non-IID), models trained by naive federated algorithms may be biased towards certain participants, and model performance across participants is non-uniform. This is known as the fairness problem in federated learning. In this paper, we formulate fairness-controlled federated learning as a dynamical multi-objective optimization problem to ensure fair performance across all participants. To solve the problem efficiently, we study the convergence and bias of Adam as the server optimizer in federated learning, and propose Adaptive Federated Adam (AdaFedAdam) to accelerate fair federated learning with alleviated bias. We validated the effectiveness, Pareto optimality and robustness of AdaFedAdam in numerical experiments and show that AdaFedAdam outperforms existing algorithms, providing better convergence and fairness properties of the federated scheme.