 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOORD: The Oxford Offroad Radar Dataset
Mar 05, 2024There is a growing academic interest as well as commercial exploitation of millimetre-wave scanning radar for autonomous vehicle localisation and scene understanding. Although several datasets to support this research area have been released, they are primarily focused on urban or semi-urban environments. Nevertheless, rugged offroad deployments are important application areas which also present unique challenges and opportunities for this sensor technology. Therefore, the Oxford Offroad Radar Dataset (OORD) presents data collected in the rugged Scottish highlands in extreme weather. The radar data we offer to the community are accompanied by GPS/INS reference - to further stimulate research in radar place recognition. In total we release over 90GiB of radar scans as well as GPS and IMU readings by driving a diverse set of four routes over 11 forays, totalling approximately 154km of rugged driving. This is an area increasingly explored in literature, and we therefore present and release examples of recent open-sourced radar place recognition systems and their performance on our dataset. This includes a learned neural network, the weights of which we also release. The data and tools are made freely available to the community at https://oxford-robotics-institute.github.io/oord-dataset.
Navigation-Oriented Scene Understanding for Robotic Autonomy: Learning to Segment Driveability in Egocentric Images
Sep 15, 2021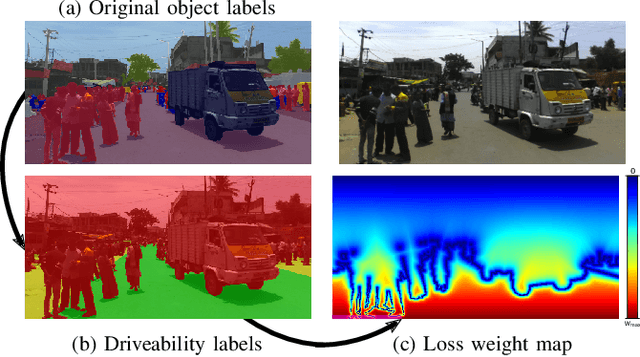
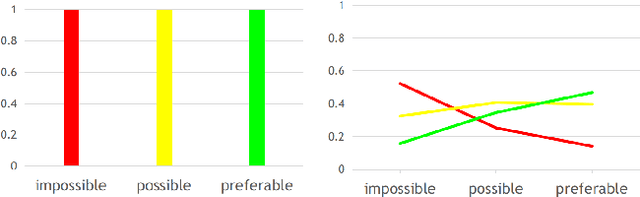

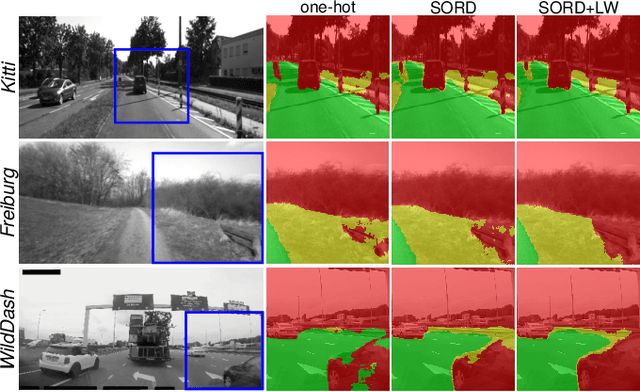
This work tackles scene understanding for outdoor robotic navigation, solely relying on images captured by an on-board camera. Conventional visual scene understanding interprets the environment based on specific descriptive categories. However, such a representation is not directly interpretable for decision-making and constrains robot operation to a specific domain. Thus, we propose to segment egocentric images directly in terms of how a robot can navigate in them, and tailor the learning problem to an autonomous navigation task. Building around an image segmentation network, we present a generic and scalable affordance-based definition consisting of 3 driveability levels which can be applied to arbitrary scenes. By encoding these levels with soft ordinal labels, we incorporate inter-class distances during learning which improves segmentation compared to standard one-hot labelling. In addition, we propose a navigation-oriented pixel-wise loss weighting method which assigns higher importance to safety-critical areas. We evaluate our approach on large-scale public image segmentation datasets spanning off-road and urban scenes. In a zero-shot cross-dataset generalization experiment, we show that our affordance learning scheme can be applied across a diverse mix of datasets and improves driveability estimation in unseen environments compared to general-purpose, single-dataset segmentation.
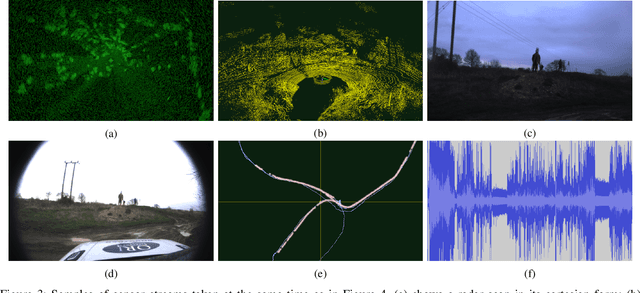
Keep off the Grass: Permissible Driving Routes from Radar with Weak Audio Supervision
May 11, 2020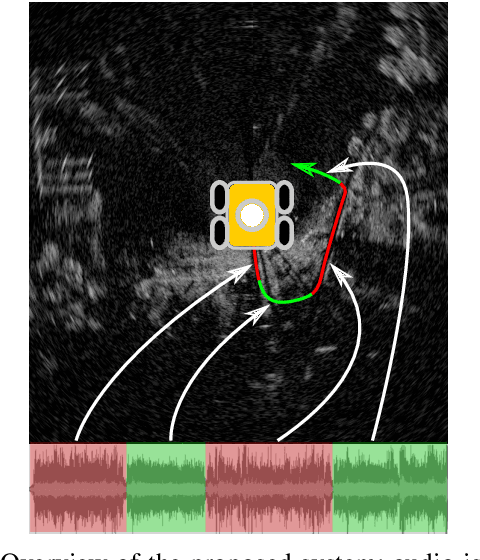
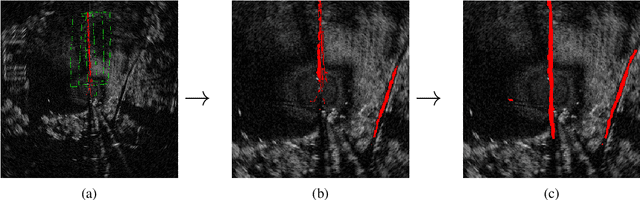
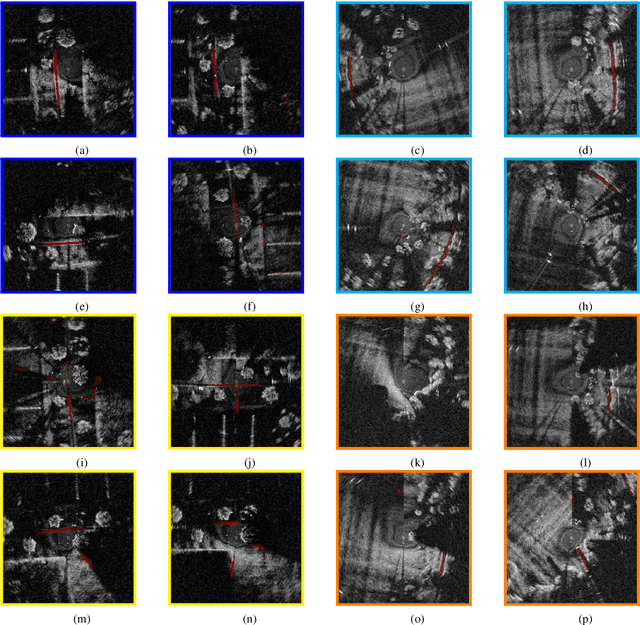
Reliable outdoor deployment of mobile robots requires the robust identification of permissible driving routes in a given environment. The performance of LiDAR and vision-based perception systems deteriorates significantly if certain environmental factors are present e.g. rain, fog, darkness. Perception systems based on FMCW scanning radar maintain full performance regardless of environmental conditions and with a longer range than alternative sensors. Learning to segment a radar scan based on driveability in a fully supervised manner is not feasible as labelling each radar scan on a bin-by-bin basis is both difficult and time-consuming to do by hand. We therefore weakly supervise the training of the radar-based classifier through an audio-based classifier that is able to predict the terrain type underneath the robot. By combining odometry, GPS and the terrain labels from the audio classifier, we are able to construct a terrain labelled trajectory of the robot in the environment which is then used to label the radar scans. Using a curriculum learning procedure, we then train a radar segmentation network to generalise beyond the initial labelling and to detect all permissible driving routes in the environment.
Sense-Assess-eXplain (SAX): Building Trust in Autonomous Vehicles in Challenging Real-World Driving Scenarios
May 05, 2020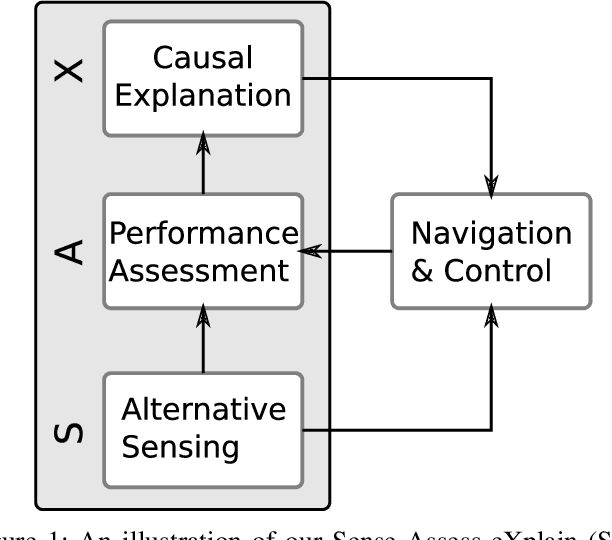


This paper discusses ongoing work in demonstrating research in mobile autonomy in challenging driving scenarios. In our approach, we address fundamental technical issues to overcome critical barriers to assurance and regulation for large-scale deployments of autonomous systems. To this end, we present how we build robots that (1) can robustly sense and interpret their environment using traditional as well as unconventional sensors; (2) can assess their own capabilities; and (3), vitally in the purpose of assurance and trust, can provide causal explanations of their interpretations and assessments. As it is essential that robots are safe and trusted, we design, develop, and demonstrate fundamental technologies in real-world applications to overcome critical barriers which impede the current deployment of robots in economically and socially important areas. Finally, we describe ongoing work in the collection of an unusual, rare, and highly valuable dataset.
Online Deep Reinforcement Learning for Autonomous UAV Navigation and Exploration of Outdoor Environments
Dec 11, 2019



With the rapidly growing expansion in the use of UAVs, the ability to autonomously navigate in varying environments and weather conditions remains a highly desirable but as-of-yet unsolved challenge. In this work, we use Deep Reinforcement Learning to continuously improve the learning and understanding of a UAV agent while exploring a partially observable environment, which simulates the challenges faced in a real-life scenario. Our innovative approach uses a double state-input strategy that combines the acquired knowledge from the raw image and a map containing positional information. This positional data aids the network understanding of where the UAV has been and how far it is from the target position, while the feature map from the current scene highlights cluttered areas that are to be avoided. Our approach is extensively tested using variants of Deep Q-Network adapted to cope with double state input data. Further, we demonstrate that by altering the reward and the Q-value function, the agent is capable of consistently outperforming the adapted Deep Q-Network, Double Deep Q- Network and Deep Recurrent Q-Network. Our results demonstrate that our proposed Extended Double Deep Q-Network (EDDQN) approach is capable of navigating through multiple unseen environments and under severe weather conditions.
Proactive Intention Recognition for Joint Human-Robot Search and Rescue Missions through Monte-Carlo Planning in POMDP Environments
Aug 27, 2019

Proactively perceiving others' intentions is a crucial skill to effectively interact in unstructured, dynamic and novel environments. This work proposes a first step towards embedding this skill in support robots for search and rescue missions. Predicting the responders' intentions, indeed, will enable exploration approaches which will identify and prioritise areas that are more relevant for the responder and, thus, for the task, leading to the development of safer, more robust and efficient joint exploration strategies. More specifically, this paper presents an active intention recognition paradigm to perceive, even under sensory constraints, not only the target's position but also the first responder's movements, which can provide information on his/her intentions (e.g. reaching the position where he/she expects the target to be). This mechanism is implemented by employing an extension of Monte-Carlo-based planning techniques for partially observable environments, where the reward function is augmented with an entropy reduction bonus. We test in simulation several configurations of reward augmentation, both information theoretic and not, as well as belief state approximations and obtain substantial improvements over the basic approach.
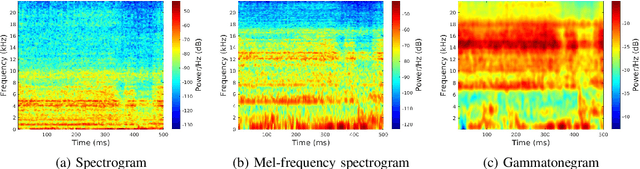
Listening for Sirens: Locating and Classifying Acoustic Alarms in City Scenes
Oct 11, 2018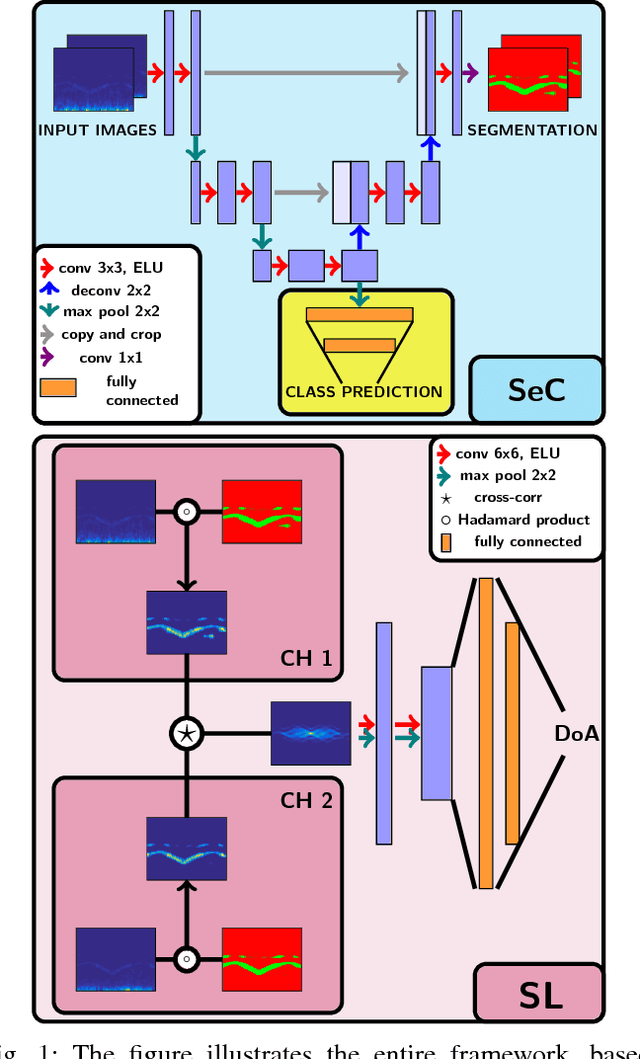


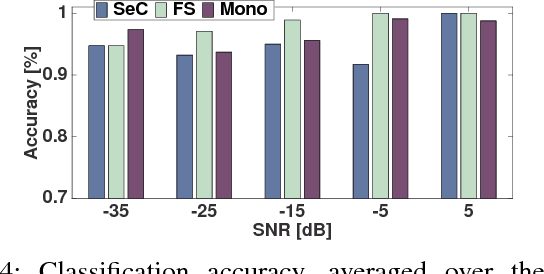
This paper is about alerting acoustic event detection and sound source localisation in an urban scenario. Specifically, we are interested in spotting the presence of horns, and sirens of emergency vehicles. In order to obtain a reliable system able to operate robustly despite the presence of traffic noise, which can be copious, unstructured and unpredictable, we propose to treat the spectrograms of incoming stereo signals as images, and apply semantic segmentation, based on a Unet architecture, to extract the target sound from the background noise. In a multi-task learning scheme, together with signal denoising, we perform acoustic event classification to identify the nature of the alerting sound. Lastly, we use the denoised signals to localise the acoustic source on the horizon plane, by regressing the direction of arrival of the sound through a CNN architecture. Our experimental evaluation shows an average classification rate of 94%, and a median absolute error on the localisation of 7.5{\deg} when operating on audio frames of 0.5s, and of 2.5{\deg} when operating on frames of 2.5s. The system offers excellent performance in particularly challenging scenarios, where the noise level is remarkably high.