 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Only Way is Ethics: A Guide to Ethical Research with Large Language Models
Dec 20, 2024
There is a significant body of work looking at the ethical considerations of large language models (LLMs): critiquing tools to measure performance and harms; proposing toolkits to aid in ideation; discussing the risks to workers; considering legislation around privacy and security etc. As yet there is no work that integrates these resources into a single practical guide that focuses on LLMs; we attempt this ambitious goal. We introduce 'LLM Ethics Whitepaper', which we provide as an open and living resource for NLP practitioners, and those tasked with evaluating the ethical implications of others' work. Our goal is to translate ethics literature into concrete recommendations and provocations for thinking with clear first steps, aimed at computer scientists. 'LLM Ethics Whitepaper' distils a thorough literature review into clear Do's and Don'ts, which we present also in this paper. We likewise identify useful toolkits to support ethical work. We refer the interested reader to the full LLM Ethics Whitepaper, which provides a succinct discussion of ethical considerations at each stage in a project lifecycle, as well as citations for the hundreds of papers from which we drew our recommendations. The present paper can be thought of as a pocket guide to conducting ethical research with LLMs.
Online Deep Reinforcement Learning for Autonomous UAV Navigation and Exploration of Outdoor Environments
Dec 11, 2019



With the rapidly growing expansion in the use of UAVs, the ability to autonomously navigate in varying environments and weather conditions remains a highly desirable but as-of-yet unsolved challenge. In this work, we use Deep Reinforcement Learning to continuously improve the learning and understanding of a UAV agent while exploring a partially observable environment, which simulates the challenges faced in a real-life scenario. Our innovative approach uses a double state-input strategy that combines the acquired knowledge from the raw image and a map containing positional information. This positional data aids the network understanding of where the UAV has been and how far it is from the target position, while the feature map from the current scene highlights cluttered areas that are to be avoided. Our approach is extensively tested using variants of Deep Q-Network adapted to cope with double state input data. Further, we demonstrate that by altering the reward and the Q-value function, the agent is capable of consistently outperforming the adapted Deep Q-Network, Double Deep Q- Network and Deep Recurrent Q-Network. Our results demonstrate that our proposed Extended Double Deep Q-Network (EDDQN) approach is capable of navigating through multiple unseen environments and under severe weather conditions.
Visual Appearance Analysis of Forest Scenes for Monocular SLAM
Jul 05, 2019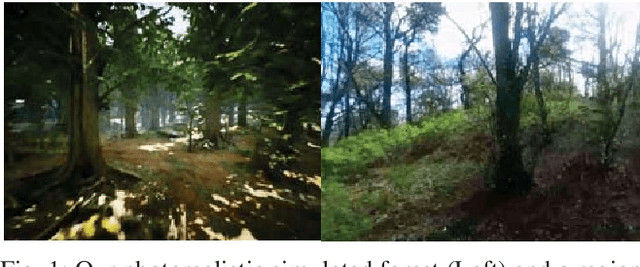
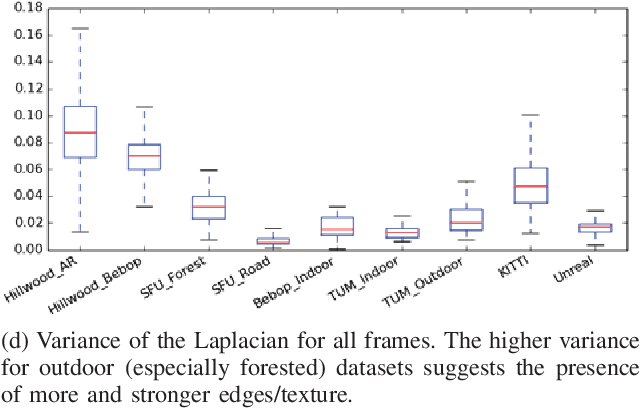
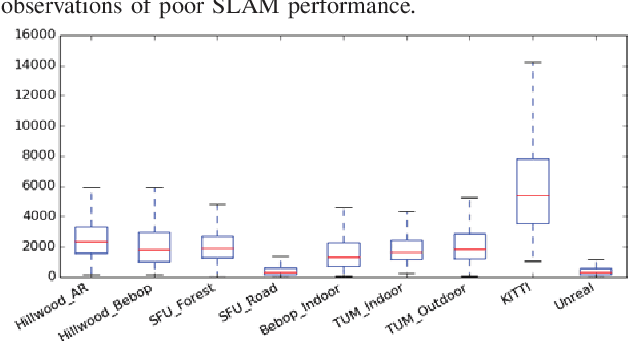
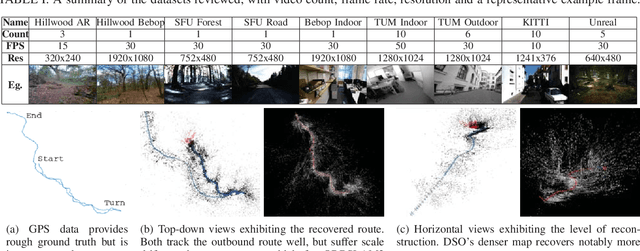
Monocular simultaneous localisation and mapping (SLAM) is a cheap and energy efficient way to enable Unmanned Aerial Vehicles (UAVs) to safely navigate managed forests and gather data crucial for monitoring tree health. SLAM research, however, has mostly been conducted in structured human environments, and as such is poorly adapted to unstructured forests. In this paper, we compare the performance of state of the art monocular SLAM systems on forest data and use visual appearance statistics to characterise the differences between forests and other environments, including a photorealistic simulated forest. We find that SLAM systems struggle with all but the most straightforward forest terrain and identify key attributes (lighting changes and in-scene motion) which distinguish forest scenes from "classic" urban datasets. These differences offer an insight into what makes forests harder to map and open the way for targeted improvements. We also demonstrate that even simulations that look impressive to the human eye can fail to properly reflect the difficult attributes of the environment they simulate, and provide suggestions for more closely mimicking natural scenes.