 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Appearance Analysis of Forest Scenes for Monocular SLAM
Paper and Code
Jul 05, 2019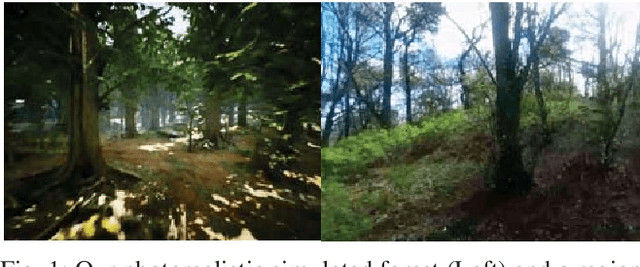
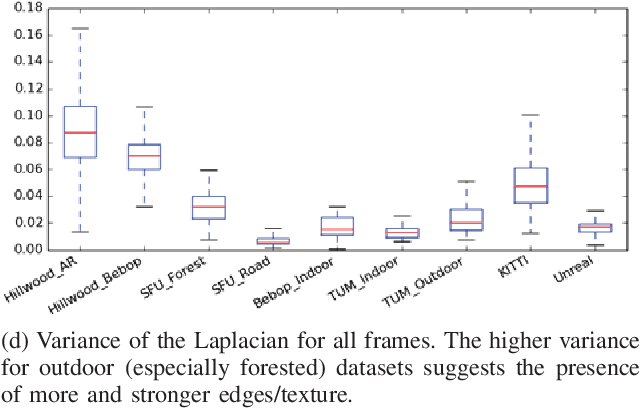
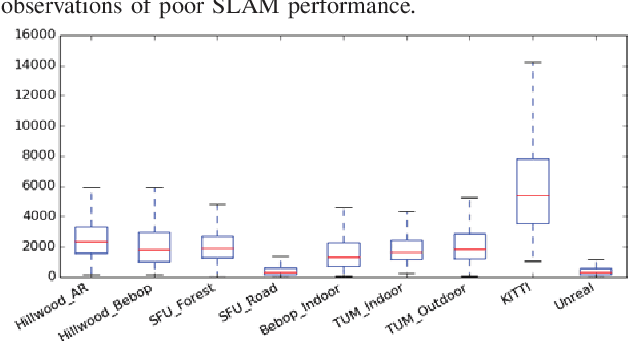
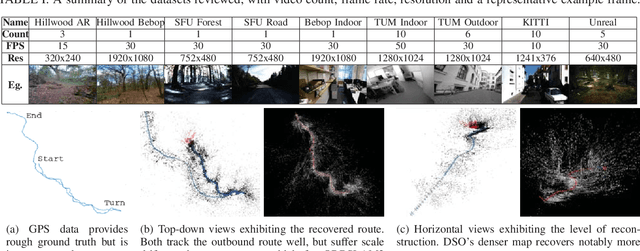
Monocular simultaneous localisation and mapping (SLAM) is a cheap and energy efficient way to enable Unmanned Aerial Vehicles (UAVs) to safely navigate managed forests and gather data crucial for monitoring tree health. SLAM research, however, has mostly been conducted in structured human environments, and as such is poorly adapted to unstructured forests. In this paper, we compare the performance of state of the art monocular SLAM systems on forest data and use visual appearance statistics to characterise the differences between forests and other environments, including a photorealistic simulated forest. We find that SLAM systems struggle with all but the most straightforward forest terrain and identify key attributes (lighting changes and in-scene motion) which distinguish forest scenes from "classic" urban datasets. These differences offer an insight into what makes forests harder to map and open the way for targeted improvements. We also demonstrate that even simulations that look impressive to the human eye can fail to properly reflect the difficult attributes of the environment they simulate, and provide suggestions for more closely mimicking natural scenes.