 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarially-learned Inference via an Ensemble of Discrete Undirected Graphical Models
Jul 09, 2020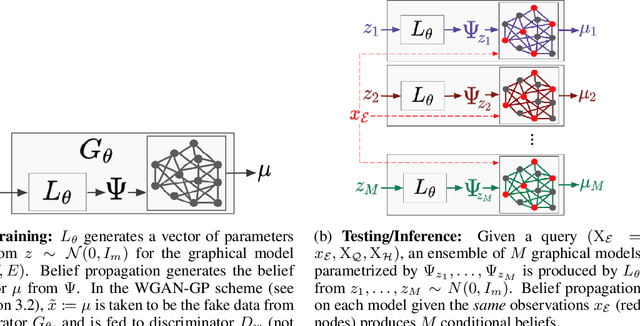
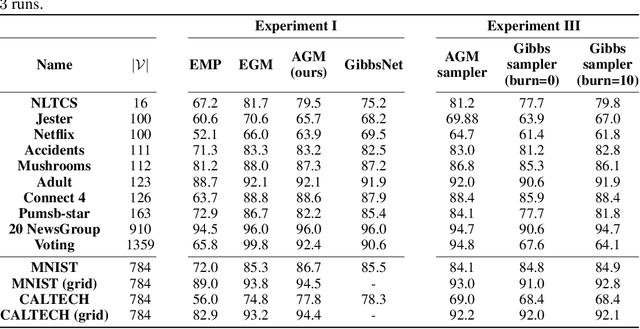
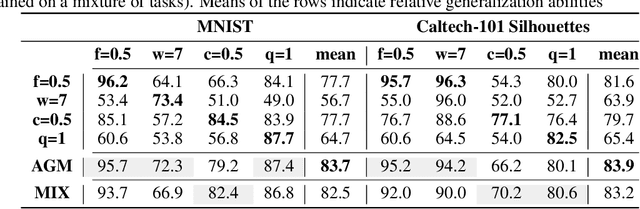
Undirected graphical models are compact representations of joint probability distributions over random variables. Given a distribution over inference tasks, graphical models of arbitrary topology can be trained using empirical risk minimization. However, when faced with new task distributions, these models (EGMs) often need to be re-trained. Instead, we propose an inference-agnostic adversarial training framework for producing an ensemble of graphical models (AGMs). The ensemble is optimized to generate data, and inference is learned as a by-product of this endeavor. AGMs perform comparably with EGMs on inference tasks that the latter were specifically optimized for. Most importantly, AGMs show significantly better generalization capabilities across distributions of inference tasks. AGMs are also on par with GibbsNet, a state-of-the-art deep neural architecture, which like AGMs, allows conditioning on any subset of random variables. Finally, AGMs allow fast data sampling, competitive with Gibbs sampling from EGMs.
Omnipush: accurate, diverse, real-world dataset of pushing dynamics with RGB-D video
Oct 01, 2019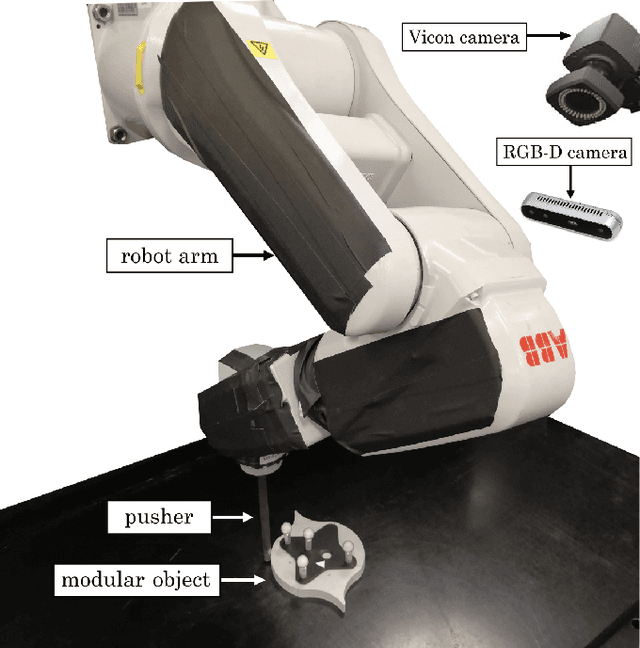
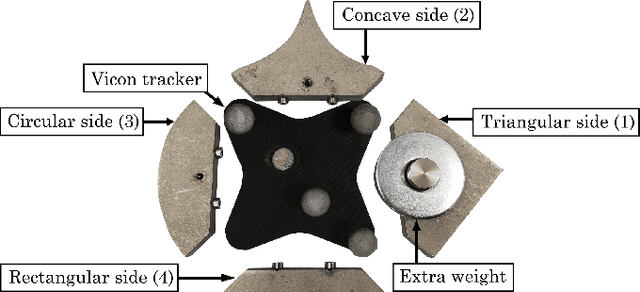
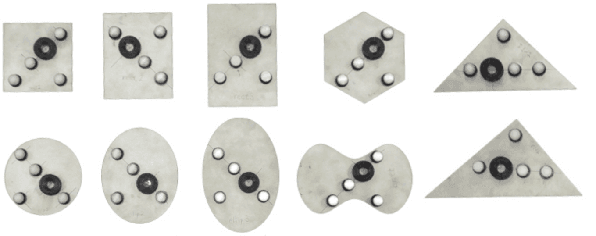
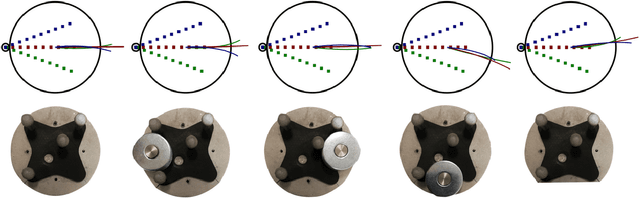
Pushing is a fundamental robotic skill. Existing work has shown how to exploit models of pushing to achieve a variety of tasks, including grasping under uncertainty, in-hand manipulation and clearing clutter. Such models, however, are approximate, which limits their applicability. Learning-based methods can reason directly from raw sensory data with accuracy, and have the potential to generalize to a wider diversity of scenarios. However, developing and testing such methods requires rich-enough datasets. In this paper we introduce Omnipush, a dataset with high variety of planar pushing behavior. In particular, we provide 250 pushes for each of 250 objects, all recorded with RGB-D and a high precision tracking system. The objects are constructed so as to systematically explore key factors that affect pushing --the shape of the object and its mass distribution-- which have not been broadly explored in previous datasets, and allow to study generalization in model learning. Omnipush includes a benchmark for meta-learning dynamic models, which requires algorithms that make good predictions and estimate their own uncertainty. We also provide an RGB video prediction benchmark and propose other relevant tasks that can be suited with this dataset. Data and code are available at \url{https://web.mit.edu/mcube/omnipush-dataset/}.
A Sufficient Statistic for Influence in Structured Multiagent Environments
Jul 22, 2019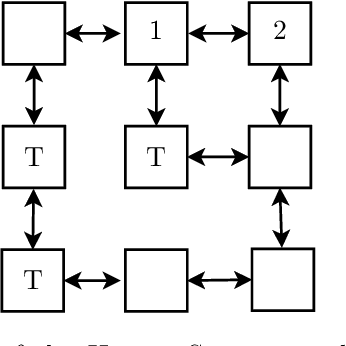
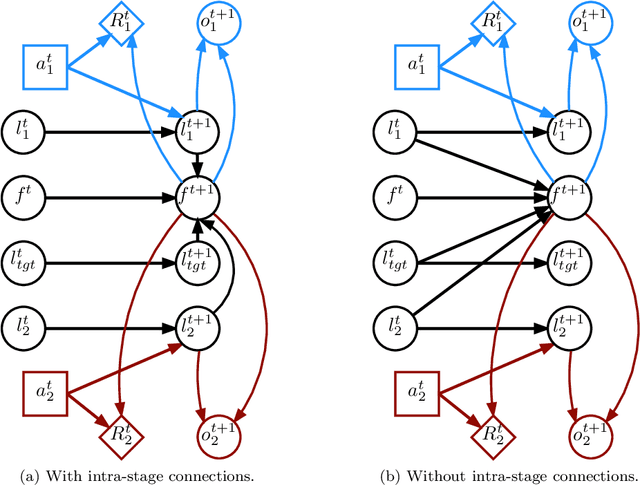

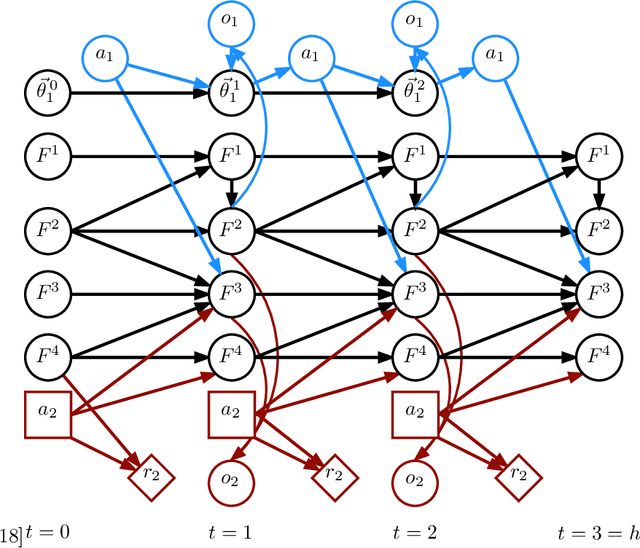
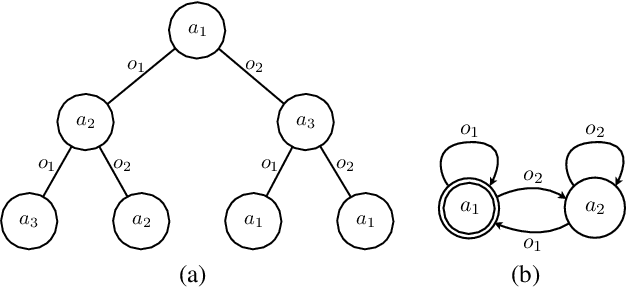
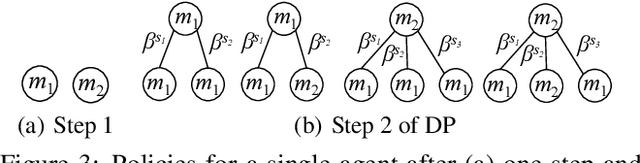
Making decisions in complex environments is a key challenge in artificial intelligence (AI). Situations involving multiple decision makers are particularly complex, leading to computation intractability of principled solution methods. A body of work in AI [4, 3, 41, 45, 47, 2] has tried to mitigate this problem by trying to bring down interaction to its core: how does the policy of one agent influence another agent? If we can find more compact representations of such influence, this can help us deal with the complexity, for instance by searching the space of influences rather than that of policies [45]. However, so far these notions of influence have been restricted in their applicability to special cases of interaction. In this paper we formalize influence-based abstraction (IBA), which facilitates the elimination of latent state factors without any loss in value, for a very general class of problems described as factored partially observable stochastic games (fPOSGs) [33]. This generalizes existing descriptions of influence, and thus can serve as the foundation for improvements in scalability and other insights in decision making in complex settings.
Combining Physical Simulators and Object-Based Networks for Control
Apr 13, 2019



Physics engines play an important role in robot planning and control; however, many real-world control problems involve complex contact dynamics that cannot be characterized analytically. Most physics engines therefore employ . approximations that lead to a loss in precision. In this paper, we propose a hybrid dynamics model, simulator-augmented interaction networks (SAIN), combining a physics engine with an object-based neural network for dynamics modeling. Compared with existing models that are purely analytical or purely data-driven, our hybrid model captures the dynamics of interacting objects in a more accurate and data-efficient manner.Experiments both in simulation and on a real robot suggest that it also leads to better performance when used in complex control tasks. Finally, we show that our model generalizes to novel environments with varying object shapes and materials.
Modular meta-learning in abstract graph networks for combinatorial generalization
Dec 19, 2018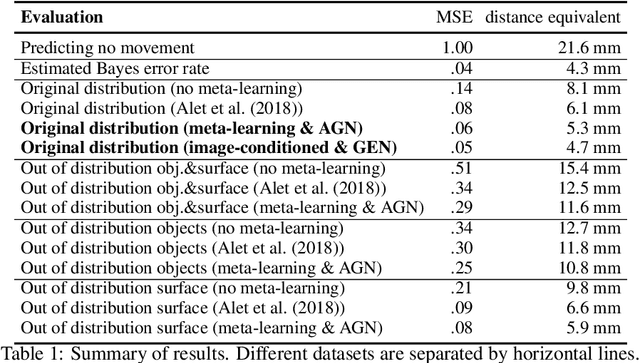


Modular meta-learning is a new framework that generalizes to unseen datasets by combining a small set of neural modules in different ways. In this work we propose abstract graph networks: using graphs as abstractions of a system's subparts without a fixed assignment of nodes to system subparts, for which we would need supervision. We combine this idea with modular meta-learning to get a flexible framework with combinatorial generalization to new tasks built in. We then use it to model the pushing of arbitrarily shaped objects from little or no training data.
Augmenting Physical Simulators with Stochastic Neural Networks: Case Study of Planar Pushing and Bouncing
Aug 09, 2018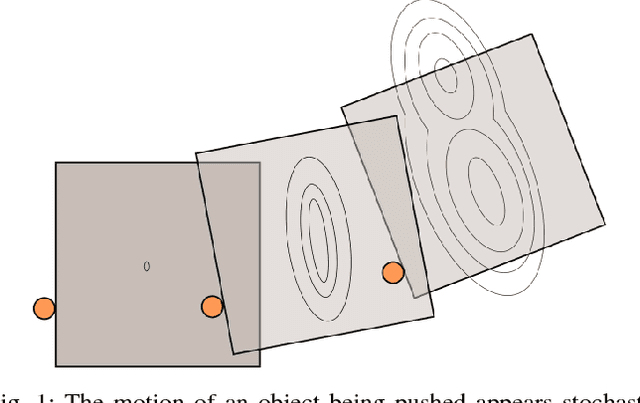

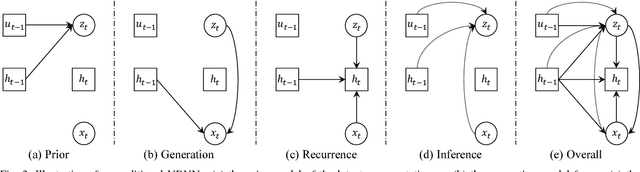

An efficient, generalizable physical simulator with universal uncertainty estimates has wide applications in robot state estimation, planning, and control. In this paper, we build such a simulator for two scenarios, planar pushing and ball bouncing, by augmenting an analytical rigid-body simulator with a neural network that learns to model uncertainty as residuals. Combining symbolic, deterministic simulators with learnable, stochastic neural nets provides us with expressiveness, efficiency, and generalizability simultaneously. Our model outperforms both purely analytical and purely learned simulators consistently on real, standard benchmarks. Compared with methods that model uncertainty using Gaussian processes, our model runs much faster, generalizes better to new object shapes, and is able to characterize the complex distribution of object trajectories.
Modular meta-learning
Jun 26, 2018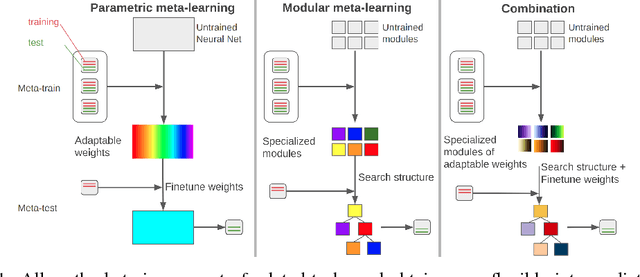



Many prediction problems, such as those that arise in the context of robotics, have a simplifying underlying structure that could accelerate learning. In this paper, we present a strategy for learning a set of neural network modules that can be combined in different ways. We train different modular structures on a set of related tasks and generalize to new tasks by composing the learned modules in new ways. We show this improves performance in two robotics-related problems.
Finding Frequent Entities in Continuous Data
May 08, 2018



In many applications that involve processing high-dimensional data, it is important to identify a small set of entities that account for a significant fraction of detections. Rather than formalize this as a clustering problem, in which all detections must be grouped into hard or soft categories, we formalize it as an instance of the frequent items or heavy hitters problem, which finds groups of tightly clustered objects that have a high density in the feature space. We show that the heavy hitters formulation generates solutions that are more accurate and effective than the clustering formulation. In addition, we present a novel online algorithm for heavy hitters, called HAC, which addresses problems in continuous space, and demonstrate its effectiveness on real video and household domains.
Planning for Decentralized Control of Multiple Robots Under Uncertainty
Feb 12, 2014

We describe a probabilistic framework for synthesizing control policies for general multi-robot systems, given environment and sensor models and a cost function. Decentralized, partially observable Markov decision processes (Dec-POMDPs) are a general model of decision processes where a team of agents must cooperate to optimize some objective (specified by a shared reward or cost function) in the presence of uncertainty, but where communication limitations mean that the agents cannot share their state, so execution must proceed in a decentralized fashion. While Dec-POMDPs are typically intractable to solve for real-world problems, recent research on the use of macro-actions in Dec-POMDPs has significantly increased the size of problem that can be practically solved as a Dec-POMDP. We describe this general model, and show how, in contrast to most existing methods that are specialized to a particular problem class, it can synthesize control policies that use whatever opportunities for coordination are present in the problem, while balancing off uncertainty in outcomes, sensor information, and information about other agents. We use three variations on a warehouse task to show that a single planner of this type can generate cooperative behavior using task allocation, direct communication, and signaling, as appropriate.