 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiteVLM: A Low-Latency Vision-Language Model Inference Pipeline for Resource-Constrained Environments
Jun 09, 2025This paper introduces an efficient Vision-Language Model (VLM) pipeline specifically optimized for deployment on embedded devices, such as those used in robotics and autonomous driving. The pipeline significantly reduces the computational overhead by jointly leveraging patch selection to filter irrelevant camera views, a token selection module to reduce input sequence length for the LLM, and speculative decoding to accelerate token generation. Evaluation on the NVIDIA DRIVE Thor platform for automonous driving application, our pipeline achieves $2.5\times$ end-to-end latency reduction without compromising task accuracy. The speed-up further increases to $3.2\times$ when applying FP8 post-training quantization. These results demonstrate our pipeline as a viable solution for enabling real-time VLM deployment in resource-constrained environments.
ReduceFormer: Attention with Tensor Reduction by Summation
Jun 11, 2024Transformers have excelled in many tasks including vision. However, efficient deployment of transformer models in low-latency or high-throughput applications is hindered by the computation in the attention mechanism which involves expensive operations such as matrix multiplication and Softmax. To address this, we introduce ReduceFormer, a family of models optimized for efficiency with the spirit of attention. ReduceFormer leverages only simple operations such as reduction and element-wise multiplication, leading to greatly simplified architecture and improved inference performance, with up to 37% reduction in latency and 44% improvement in throughput, while maintaining competitive accuracy comparable to other recent methods. The proposed model family is suitable for edge devices where compute resource and memory bandwidth are limited, as well as for cloud computing where high throughput is sought after.
Swin-Free: Achieving Better Cross-Window Attention and Efficiency with Size-varying Window
Jun 23, 2023Transformer models have shown great potential in computer vision, following their success in language tasks. Swin Transformer is one of them that outperforms convolution-based architectures in terms of accuracy, while improving efficiency when compared to Vision Transformer (ViT) and its variants, which have quadratic complexity with respect to the input size. Swin Transformer features shifting windows that allows cross-window connection while limiting self-attention computation to non-overlapping local windows. However, shifting windows introduces memory copy operations, which account for a significant portion of its runtime. To mitigate this issue, we propose Swin-Free in which we apply size-varying windows across stages, instead of shifting windows, to achieve cross-connection among local windows. With this simple design change, Swin-Free runs faster than the Swin Transformer at inference with better accuracy. Furthermore, we also propose a few of Swin-Free variants that are faster than their Swin Transformer counterparts.
Depth Estimation with Simplified Transformer
Apr 28, 2022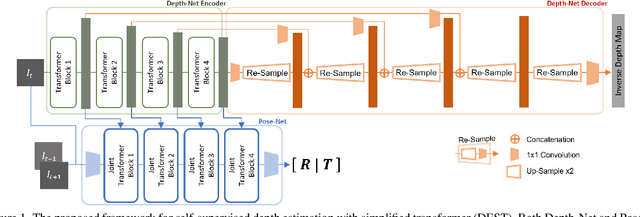
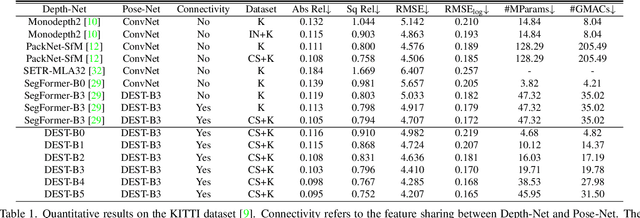
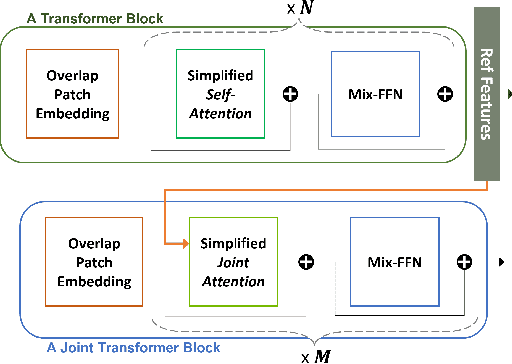
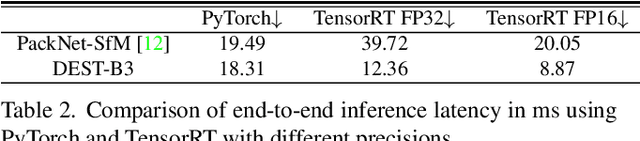
Transformer and its variants have shown state-of-the-art results in many vision tasks recently, ranging from image classification to dense prediction. Despite of their success, limited work has been reported on improving the model efficiency for deployment in latency-critical applications, such as autonomous driving and robotic navigation. In this paper, we aim at improving upon the existing transformers in vision, and propose a method for self-supervised monocular Depth Estimation with Simplified Transformer (DEST), which is efficient and particularly suitable for deployment on GPU-based platforms. Through strategic design choices, our model leads to significant reduction in model size, complexity, as well as inference latency, while achieving superior accuracy as compared to state-of-the-art. We also show that our design generalize well to other dense prediction task without bells and whistles.
Silent Bugs in Deep Learning Frameworks: An Empirical Study of Keras and TensorFlow
Dec 26, 2021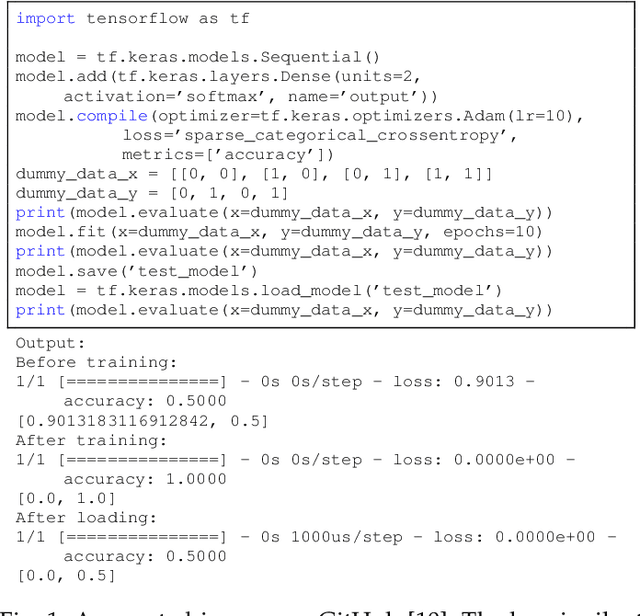
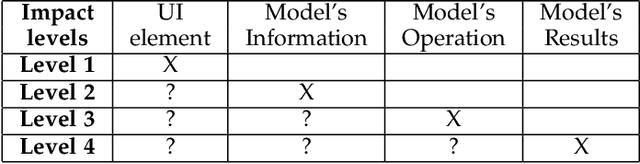
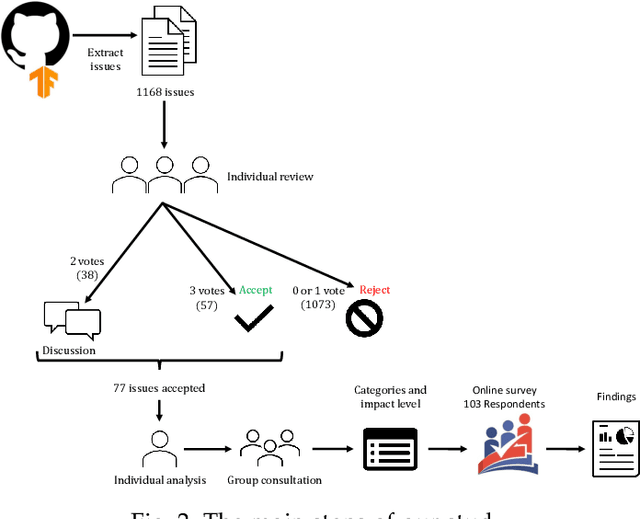

Deep Learning (DL) frameworks are now widely used, simplifying the creation of complex models as well as their integration to various applications even to non DL experts. However, like any other programs, they are prone to bugs. This paper deals with the subcategory of bugs named silent bugs: they lead to wrong behavior but they do not cause system crashes or hangs, nor show an error message to the user. Such bugs are even more dangerous in DL applications and frameworks due to the "black-box" and stochastic nature of the systems (the end user can not understand how the model makes decisions). This paper presents the first empirical study of Keras and TensorFlow silent bugs, and their impact on users' programs. We extracted closed issues related to Keras from the TensorFlow GitHub repository. Out of the 1,168 issues that we gathered, 77 were reproducible silent bugs affecting users' programs. We categorized the bugs based on the effects on the users' programs and the components where the issues occurred, using information from the issue reports. We then derived a threat level for each of the issues, based on the impact they had on the users' programs. To assess the relevance of identified categories and the impact scale, we conducted an online survey with 103 DL developers. The participants generally agreed with the significant impact of silent bugs in DL libraries and acknowledged our findings (i.e., categories of silent bugs and the proposed impact scale). Finally, leveraging our analysis, we provide a set of guidelines to facilitate safeguarding against such bugs in DL frameworks.
How to Certify Machine Learning Based Safety-critical Systems? A Systematic Literature Review
Aug 03, 2021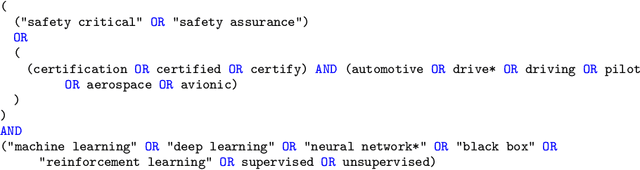
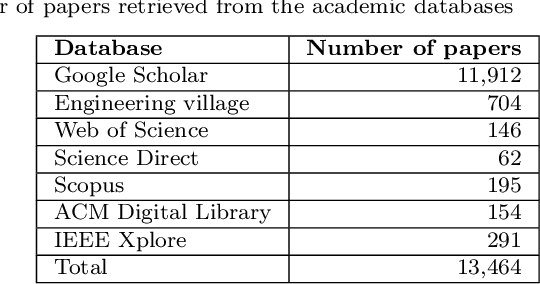
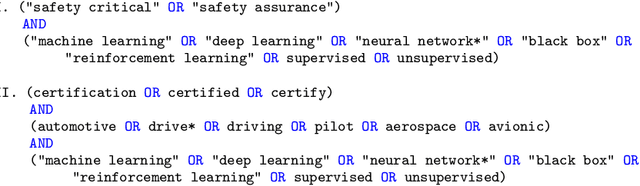
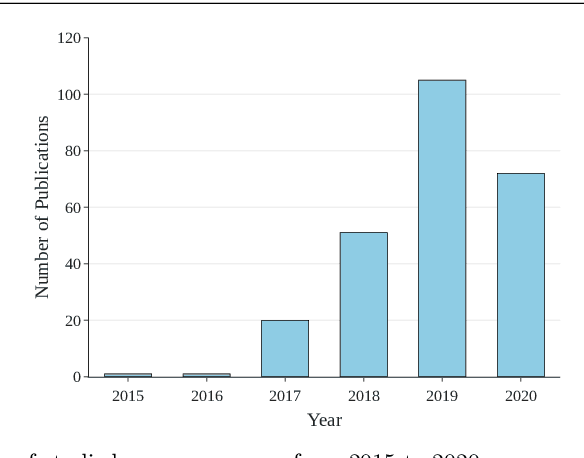
Context: Machine Learning (ML) has been at the heart of many innovations over the past years. However, including it in so-called 'safety-critical' systems such as automotive or aeronautic has proven to be very challenging, since the shift in paradigm that ML brings completely changes traditional certification approaches. Objective: This paper aims to elucidate challenges related to the certification of ML-based safety-critical systems, as well as the solutions that are proposed in the literature to tackle them, answering the question 'How to Certify Machine Learning Based Safety-critical Systems?'. Method: We conduct a Systematic Literature Review (SLR) of research papers published between 2015 to 2020, covering topics related to the certification of ML systems. In total, we identified 217 papers covering topics considered to be the main pillars of ML certification: Robustness, Uncertainty, Explainability, Verification, Safe Reinforcement Learning, and Direct Certification. We analyzed the main trends and problems of each sub-field and provided summaries of the papers extracted. Results: The SLR results highlighted the enthusiasm of the community for this subject, as well as the lack of diversity in terms of datasets and type of models. It also emphasized the need to further develop connections between academia and industries to deepen the domain study. Finally, it also illustrated the necessity to build connections between the above mention main pillars that are for now mainly studied separately. Conclusion: We highlighted current efforts deployed to enable the certification of ML based software systems, and discuss some future research directions.