 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelaxed Triangle Inequality for Kullback-Leibler Divergence Between Multivariate Gaussian Distributions
Jan 31, 2026The Kullback-Leibler (KL) divergence is not a proper distance metric and does not satisfy the triangle inequality, posing theoretical challenges in certain practical applications. Existing work has demonstrated that KL divergence between multivariate Gaussian distributions follows a relaxed triangle inequality. Given any three multivariate Gaussian distributions $\mathcal{N}_1, \mathcal{N}_2$, and $\mathcal{N}_3$, if $KL(\mathcal{N}_1, \mathcal{N}_2)\leq ε_1$ and $KL(\mathcal{N}_2, \mathcal{N}_3)\leq ε_2$, then $KL(\mathcal{N}_1, \mathcal{N}_3)< 3ε_1+3ε_2+2\sqrt{ε_1ε_2}+o(ε_1)+o(ε_2)$. However, the supremum of $KL(\mathcal{N}_1, \mathcal{N}_3)$ is still unknown. In this paper, we investigate the relaxed triangle inequality for the KL divergence between multivariate Gaussian distributions and give the supremum of $KL(\mathcal{N}_1, \mathcal{N}_3)$ as well as the conditions when the supremum can be attained. When $ε_1$ and $ε_2$ are small, the supremum is $ε_1+ε_2+\sqrt{ε_1ε_2}+o(ε_1)+o(ε_2)$. Finally, we demonstrate several applications of our results in out-of-distribution detection with flow-based generative models and safe reinforcement learning.
LiNeXt: Revisiting LiDAR Completion with Efficient Non-Diffusion Architectures
Nov 13, 20253D LiDAR scene completion from point clouds is a fundamental component of perception systems in autonomous vehicles. Previous methods have predominantly employed diffusion models for high-fidelity reconstruction. However, their multi-step iterative sampling incurs significant computational overhead, limiting its real-time applicability. To address this, we propose LiNeXt-a lightweight, non-diffusion network optimized for rapid and accurate point cloud completion. Specifically, LiNeXt first applies the Noise-to-Coarse (N2C) Module to denoise the input noisy point cloud in a single pass, thereby obviating the multi-step iterative sampling of diffusion-based methods. The Refine Module then takes the coarse point cloud and its intermediate features from the N2C Module to perform more precise refinement, further enhancing structural completeness. Furthermore, we observe that LiDAR point clouds exhibit a distance-dependent spatial distribution, being densely sampled at proximal ranges and sparsely sampled at distal ranges. Accordingly, we propose the Distance-aware Selected Repeat strategy to generate a more uniformly distributed noisy point cloud. On the SemanticKITTI dataset, LiNeXt achieves a 199.8x speedup in inference, reduces Chamfer Distance by 50.7%, and uses only 6.1% of the parameters compared with LiDiff. These results demonstrate the superior efficiency and effectiveness of LiNeXt for real-time scene completion.
Enhancing Small-Scale Dataset Expansion with Triplet-Connection-based Sample Re-Weighting
Aug 11, 2025The performance of computer vision models in certain real-world applications, such as medical diagnosis, is often limited by the scarcity of available images. Expanding datasets using pre-trained generative models is an effective solution. However, due to the uncontrollable generation process and the ambiguity of natural language, noisy images may be generated. Re-weighting is an effective way to address this issue by assigning low weights to such noisy images. We first theoretically analyze three types of supervision for the generated images. Based on the theoretical analysis, we develop TriReWeight, a triplet-connection-based sample re-weighting method to enhance generative data augmentation. Theoretically, TriReWeight can be integrated with any generative data augmentation methods and never downgrade their performance. Moreover, its generalization approaches the optimal in the order $O(\sqrt{d\ln (n)/n})$. Our experiments validate the correctness of the theoretical analysis and demonstrate that our method outperforms the existing SOTA methods by $7.9\%$ on average over six natural image datasets and by $3.4\%$ on average over three medical datasets. We also experimentally validate that our method can enhance the performance of different generative data augmentation methods.
Interactive Hybrid Rice Breeding with Parametric Dual Projection
Jul 16, 2025



Hybrid rice breeding crossbreeds different rice lines and cultivates the resulting hybrids in fields to select those with desirable agronomic traits, such as higher yields. Recently, genomic selection has emerged as an efficient way for hybrid rice breeding. It predicts the traits of hybrids based on their genes, which helps exclude many undesired hybrids, largely reducing the workload of field cultivation. However, due to the limited accuracy of genomic prediction models, breeders still need to combine their experience with the models to identify regulatory genes that control traits and select hybrids, which remains a time-consuming process. To ease this process, in this paper, we proposed a visual analysis method to facilitate interactive hybrid rice breeding. Regulatory gene identification and hybrid selection naturally ensemble a dual-analysis task. Therefore, we developed a parametric dual projection method with theoretical guarantees to facilitate interactive dual analysis. Based on this dual projection method, we further developed a gene visualization and a hybrid visualization to verify the identified regulatory genes and hybrids. The effectiveness of our method is demonstrated through the quantitative evaluation of the parametric dual projection method, identified regulatory genes and desired hybrids in the case study, and positive feedback from breeders.
Let Synthetic Data Shine: Domain Reassembly and Soft-Fusion for Single Domain Generalization
Mar 17, 2025Single Domain Generalization (SDG) aims to train models with consistent performance across diverse scenarios using data from a single source. While using latent diffusion models (LDMs) show promise in augmenting limited source data, we demonstrate that directly using synthetic data can be detrimental due to significant feature distribution discrepancies between synthetic and real target domains, leading to performance degradation. To address this issue, we propose Discriminative Domain Reassembly and Soft-Fusion (DRSF), a training framework leveraging synthetic data to improve model generalization. We employ LDMs to produce diverse pseudo-target domain samples and introduce two key modules to handle distribution bias. First, Discriminative Feature Decoupling and Reassembly (DFDR) module uses entropy-guided attention to recalibrate channel-level features, suppressing synthetic noise while preserving semantic consistency. Second, Multi-pseudo-domain Soft Fusion (MDSF) module uses adversarial training with latent-space feature interpolation, creating continuous feature transitions between domains. Extensive SDG experiments on object detection and semantic segmentation tasks demonstrate that DRSF achieves substantial performance gains with only marginal computational overhead. Notably, DRSF's plug-and-play architecture enables seamless integration with unsupervised domain adaptation paradigms, underscoring its broad applicability in addressing diverse and real-world domain challenges.
Vision-based 3D Semantic Scene Completion via Capture Dynamic Representations
Mar 08, 2025The vision-based semantic scene completion task aims to predict dense geometric and semantic 3D scene representations from 2D images. However, the presence of dynamic objects in the scene seriously affects the accuracy of the model inferring 3D structures from 2D images. Existing methods simply stack multiple frames of image input to increase dense scene semantic information, but ignore the fact that dynamic objects and non-texture areas violate multi-view consistency and matching reliability. To address these issues, we propose a novel method, CDScene: Vision-based Robust Semantic Scene Completion via Capturing Dynamic Representations. First, we leverage a multimodal large-scale model to extract 2D explicit semantics and align them into 3D space. Second, we exploit the characteristics of monocular and stereo depth to decouple scene information into dynamic and static features. The dynamic features contain structural relationships around dynamic objects, and the static features contain dense contextual spatial information. Finally, we design a dynamic-static adaptive fusion module to effectively extract and aggregate complementary features, achieving robust and accurate semantic scene completion in autonomous driving scenarios. Extensive experimental results on the SemanticKITTI, SSCBench-KITTI360, and SemanticKITTI-C datasets demonstrate the superiority and robustness of CDScene over existing state-of-the-art methods.
VLScene: Vision-Language Guidance Distillation for Camera-Based 3D Semantic Scene Completion
Mar 08, 2025Camera-based 3D semantic scene completion (SSC) provides dense geometric and semantic perception for autonomous driving. However, images provide limited information making the model susceptible to geometric ambiguity caused by occlusion and perspective distortion. Existing methods often lack explicit semantic modeling between objects, limiting their perception of 3D semantic context. To address these challenges, we propose a novel method VLScene: Vision-Language Guidance Distillation for Camera-based 3D Semantic Scene Completion. The key insight is to use the vision-language model to introduce high-level semantic priors to provide the object spatial context required for 3D scene understanding. Specifically, we design a vision-language guidance distillation process to enhance image features, which can effectively capture semantic knowledge from the surrounding environment and improve spatial context reasoning. In addition, we introduce a geometric-semantic sparse awareness mechanism to propagate geometric structures in the neighborhood and enhance semantic information through contextual sparse interactions. Experimental results demonstrate that VLScene achieves rank-1st performance on challenging benchmarks--SemanticKITTI and SSCBench-KITTI-360, yielding remarkably mIoU scores of 17.52 and 19.10, respectively.
CSubBT: A Self-Adjusting Execution Framework for Mobile Manipulation System
Feb 28, 2025



With the advancements in modern intelligent technologies, mobile robots equipped with manipulators are increasingly operating in unstructured environments. These robots can plan sequences of actions for long-horizon tasks based on perceived information. However, in practice, the planned actions often fail due to discrepancies between the perceptual information used for planning and the actual conditions. In this paper, we introduce the {\itshape Conditional Subtree} (CSubBT), a general self-adjusting execution framework for mobile manipulation tasks based on Behavior Trees (BTs). CSubBT decomposes symbolic action into sub-actions and uses BTs to control their execution, addressing any potential anomalies during the process. CSubBT treats common anomalies as constraint non-satisfaction problems and continuously guides the robot in performing tasks by sampling new action parameters in the constraint space when anomalies are detected. We demonstrate the robustness of our framework through extensive manipulation experiments on different platforms, both in simulation and real-world settings.
Learning Temporal 3D Semantic Scene Completion via Optical Flow Guidance
Feb 20, 2025


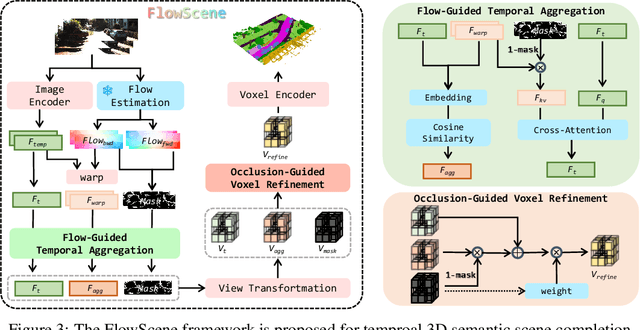
3D Semantic Scene Completion (SSC) provides comprehensive scene geometry and semantics for autonomous driving perception, which is crucial for enabling accurate and reliable decision-making. However, existing SSC methods are limited to capturing sparse information from the current frame or naively stacking multi-frame temporal features, thereby failing to acquire effective scene context. These approaches ignore critical motion dynamics and struggle to achieve temporal consistency. To address the above challenges, we propose a novel temporal SSC method FlowScene: Learning Temporal 3D Semantic Scene Completion via Optical Flow Guidance. By leveraging optical flow, FlowScene can integrate motion, different viewpoints, occlusions, and other contextual cues, thereby significantly improving the accuracy of 3D scene completion. Specifically, our framework introduces two key components: (1) a Flow-Guided Temporal Aggregation module that aligns and aggregates temporal features using optical flow, capturing motion-aware context and deformable structures; and (2) an Occlusion-Guided Voxel Refinement module that injects occlusion masks and temporally aggregated features into 3D voxel space, adaptively refining voxel representations for explicit geometric modeling. Experimental results demonstrate that FlowScene achieves state-of-the-art performance on the SemanticKITTI and SSCBench-KITTI-360 benchmarks.
Object Style Diffusion for Generalized Object Detection in Urban Scene
Dec 18, 2024



Object detection is a critical task in computer vision, with applications in various domains such as autonomous driving and urban scene monitoring. However, deep learning-based approaches often demand large volumes of annotated data, which are costly and difficult to acquire, particularly in complex and unpredictable real-world environments. This dependency significantly hampers the generalization capability of existing object detection techniques. To address this issue, we introduce a novel single-domain object detection generalization method, named GoDiff, which leverages a pre-trained model to enhance generalization in unseen domains. Central to our approach is the Pseudo Target Data Generation (PTDG) module, which employs a latent diffusion model to generate pseudo-target domain data that preserves source domain characteristics while introducing stylistic variations. By integrating this pseudo data with source domain data, we diversify the training dataset. Furthermore, we introduce a cross-style instance normalization technique to blend style features from different domains generated by the PTDG module, thereby increasing the detector's robustness. Experimental results demonstrate that our method not only enhances the generalization ability of existing detectors but also functions as a plug-and-play enhancement for other single-domain generalization methods, achieving state-of-the-art performance in autonomous driving scenarios.