 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry-Breaking in Multi-Agent Navigation: Winding Number-Aware MPC with a Learned Topological Strategy
Nov 19, 2025We address the fundamental challenge of resolving symmetry-induced deadlocks in distributed multi-agent navigation by proposing a new hierarchical navigation method. When multiple agents interact, it is inherently difficult for them to autonomously break the symmetry of deciding how to pass each other. To tackle this problem, we introduce an approach that quantifies cooperative symmetry-breaking strategies using a topological invariant called the winding number, and learns the strategies themselves through reinforcement learning. Our method features a hierarchical policy consisting of a learning-based Planner, which plans topological cooperative strategies, and a model-based Controller, which executes them. Through reinforcement learning, the Planner learns to produce two types of parameters for the Controller: one is the topological cooperative strategy represented by winding numbers, and the other is a set of dynamic weights that determine which agent interaction to prioritize in dense scenarios where multiple agents cross simultaneously. The Controller then generates collision-free and efficient motions based on the strategy and weights provided by the Planner. This hierarchical structure combines the flexible decision-making ability of learning-based methods with the reliability of model-based approaches. Simulation and real-world robot experiments demonstrate that our method outperforms existing baselines, particularly in dense environments, by efficiently avoiding collisions and deadlocks while achieving superior navigation performance. The code for the experiments is available at https://github.com/omron-sinicx/WNumMPC.
Lean Formalization of Generalization Error Bound by Rademacher Complexity
Mar 25, 2025We formalize the generalization error bound using Rademacher complexity in the Lean 4 theorem prover. Generalization error quantifies the gap between a learning machine's performance on given training data versus unseen test data, and Rademacher complexity serves as an estimate of this error based on the complexity of learning machines, or hypothesis class. Unlike traditional methods such as PAC learning and VC dimension, Rademacher complexity is applicable across diverse machine learning scenarios including deep learning and kernel methods. We formalize key concepts and theorems, including the empirical and population Rademacher complexities, and establish generalization error bounds through formal proofs of McDiarmid's inequality, Hoeffding's lemma, and symmetrization arguments.
Near-Optimal Policy Identification in Robust Constrained Markov Decision Processes via Epigraph Form
Sep 02, 2024Designing a safe policy for uncertain environments is crucial in real-world control applications. However, this challenge remains inadequately addressed within the Markov decision process (MDP) framework. This paper presents the first algorithm capable of identifying a near-optimal policy in a robust constrained MDP (RCMDP), where an optimal policy minimizes cumulative cost while satisfying constraints in the worst-case scenario across a set of environments. We first prove that the conventional Lagrangian max-min formulation with policy gradient methods can become trapped in suboptimal solutions by encountering a sum of conflicting gradients from the objective and constraint functions during its inner minimization problem. To address this, we leverage the epigraph form of the RCMDP problem, which resolves the conflict by selecting a single gradient from either the objective or the constraints. Building on the epigraph form, we propose a binary search algorithm with a policy gradient subroutine and prove that it identifies an $\varepsilon$-optimal policy in an RCMDP with $\tilde{\mathcal{O}}(\varepsilon^{-4})$ policy evaluations.
Generation of Geodesics with Actor-Critic Reinforcement Learning to Predict Midpoints
Jul 02, 2024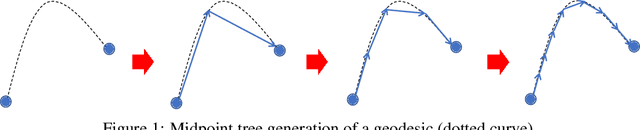
To find the shortest paths for all pairs on continuous manifolds with infinitesimally defined metrics, we propose to generate them by predicting midpoints recursively and an actor-critic method to learn midpoint prediction. We prove the soundness of our approach and show experimentally that the proposed method outperforms existing methods on both local and global path planning tasks.
Swarm Body: Embodied Swarm Robots
Mar 01, 2024
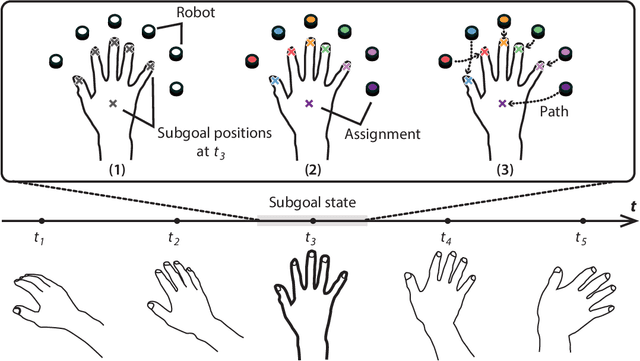

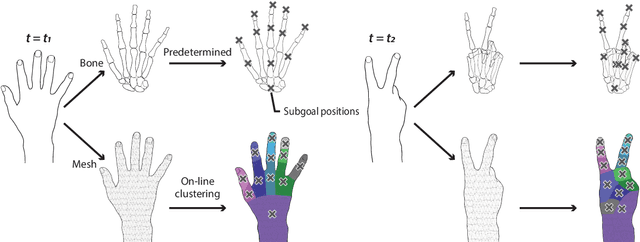
The human brain's plasticity allows for the integration of artificial body parts into the human body. Leveraging this, embodied systems realize intuitive interactions with the environment. We introduce a novel concept: embodied swarm robots. Swarm robots constitute a collective of robots working in harmony to achieve a common objective, in our case, serving as functional body parts. Embodied swarm robots can dynamically alter their shape, density, and the correspondences between body parts and individual robots. We contribute an investigation of the influence on embodiment of swarm robot-specific factors derived from these characteristics, focusing on a hand. Our paper is the first to examine these factors through virtual reality (VR) and real-world robot studies to provide essential design considerations and applications of embodied swarm robots. Through quantitative and qualitative analysis, we identified a system configuration to achieve the embodiment of swarm robots.
Benchmarking Actor-Critic Deep Reinforcement Learning Algorithms for Robotics Control with Action Constraints
Apr 18, 2023



This study presents a benchmark for evaluating action-constrained reinforcement learning (RL) algorithms. In action-constrained RL, each action taken by the learning system must comply with certain constraints. These constraints are crucial for ensuring the feasibility and safety of actions in real-world systems. We evaluate existing algorithms and their novel variants across multiple robotics control environments, encompassing multiple action constraint types. Our evaluation provides the first in-depth perspective of the field, revealing surprising insights, including the effectiveness of a straightforward baseline approach. The benchmark problems and associated code utilized in our experiments are made available online at github.com/omron-sinicx/action-constrained-RL-benchmark for further research and development.