Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration of Geodesics with Actor-Critic Reinforcement Learning to Predict Midpoints
Paper and Code
Jul 02, 2024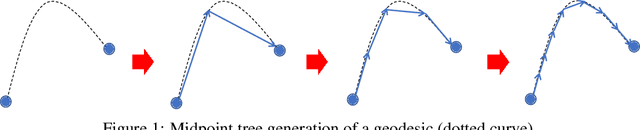
To find the shortest paths for all pairs on continuous manifolds with infinitesimally defined metrics, we propose to generate them by predicting midpoints recursively and an actor-critic method to learn midpoint prediction. We prove the soundness of our approach and show experimentally that the proposed method outperforms existing methods on both local and global path planning tasks.
* 15 pages with 6 pages of appendices and references, 8 figures
View paper on