 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Data Recording System for Clothing with Motion-Controlled Robotic Sliding
Nov 08, 2025The tactile sensation of clothing is critical to wearer comfort. To reveal physical properties that make clothing comfortable, systematic collection of tactile data during sliding motion is required. We propose a robotic arm-based system for collecting tactile data from intact garments. The system performs stroking measurements with a simulated fingertip while precisely controlling speed and direction, enabling creation of motion-labeled, multimodal tactile databases. Machine learning evaluation showed that including motion-related parameters improved identification accuracy for audio and acceleration data, demonstrating the efficacy of motion-related labels for characterizing clothing tactile sensation. This system provides a scalable, non-destructive method for capturing tactile data of clothing, contributing to future studies on fabric perception and reproduction.
Robot Swarm Control Based on Smoothed Particle Hydrodynamics for Obstacle-Unaware Navigation
Apr 25, 2024Robot swarms hold immense potential for performing complex tasks far beyond the capabilities of individual robots. However, the challenge in unleashing this potential is the robots' limited sensory capabilities, which hinder their ability to detect and adapt to unknown obstacles in real-time. To overcome this limitation, we introduce a novel robot swarm control method with an indirect obstacle detector using a smoothed particle hydrodynamics (SPH) model. The indirect obstacle detector can predict the collision with an obstacle and its collision point solely from the robot's velocity information. This approach enables the swarm to effectively and accurately navigate environments without the need for explicit obstacle detection, significantly enhancing their operational robustness and efficiency. Our method's superiority is quantitatively validated through a comparative analysis, showcasing its significant navigation and pattern formation improvements under obstacle-unaware conditions.
Swarm Body: Embodied Swarm Robots
Mar 01, 2024
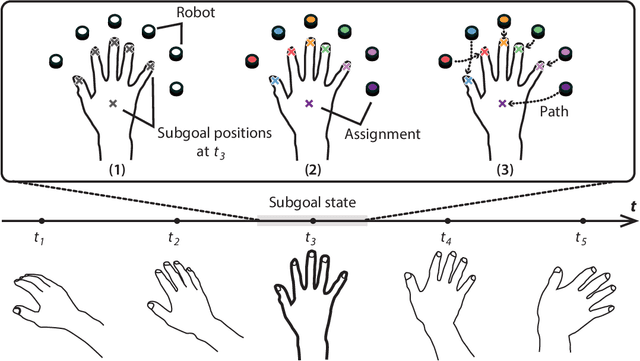

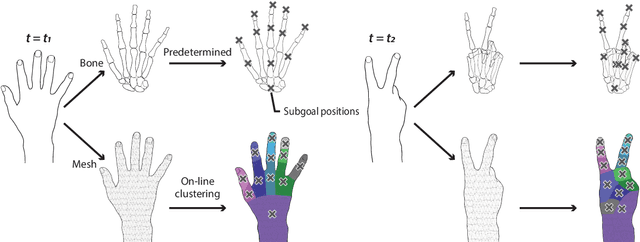
The human brain's plasticity allows for the integration of artificial body parts into the human body. Leveraging this, embodied systems realize intuitive interactions with the environment. We introduce a novel concept: embodied swarm robots. Swarm robots constitute a collective of robots working in harmony to achieve a common objective, in our case, serving as functional body parts. Embodied swarm robots can dynamically alter their shape, density, and the correspondences between body parts and individual robots. We contribute an investigation of the influence on embodiment of swarm robot-specific factors derived from these characteristics, focusing on a hand. Our paper is the first to examine these factors through virtual reality (VR) and real-world robot studies to provide essential design considerations and applications of embodied swarm robots. Through quantitative and qualitative analysis, we identified a system configuration to achieve the embodiment of swarm robots.