 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAPPI: Interactive Optimization with LLM-Assisted Preference-Based Problem Instantiation
Dec 16, 2025Many real-world tasks, such as trip planning or meal planning, can be formulated as combinatorial optimization problems. However, using optimization solvers is difficult for end users because it requires problem instantiation: defining candidate items, assigning preference scores, and specifying constraints. We introduce LAPPI (LLM-Assisted Preference-based Problem Instantiation), an interactive approach that uses large language models (LLMs) to support users in this instantiation process. Through natural language conversations, the system helps users transform vague preferences into well-defined optimization problems. These instantiated problems are then passed to existing optimization solvers to generate solutions. In a user study on trip planning, our method successfully captured user preferences and generated feasible plans that outperformed both conventional and prompt-engineering approaches. We further demonstrate LAPPI's versatility by adapting it to an additional use case.
Robot Swarm Control Based on Smoothed Particle Hydrodynamics for Obstacle-Unaware Navigation
Apr 25, 2024Robot swarms hold immense potential for performing complex tasks far beyond the capabilities of individual robots. However, the challenge in unleashing this potential is the robots' limited sensory capabilities, which hinder their ability to detect and adapt to unknown obstacles in real-time. To overcome this limitation, we introduce a novel robot swarm control method with an indirect obstacle detector using a smoothed particle hydrodynamics (SPH) model. The indirect obstacle detector can predict the collision with an obstacle and its collision point solely from the robot's velocity information. This approach enables the swarm to effectively and accurately navigate environments without the need for explicit obstacle detection, significantly enhancing their operational robustness and efficiency. Our method's superiority is quantitatively validated through a comparative analysis, showcasing its significant navigation and pattern formation improvements under obstacle-unaware conditions.
Swarm Body: Embodied Swarm Robots
Mar 01, 2024
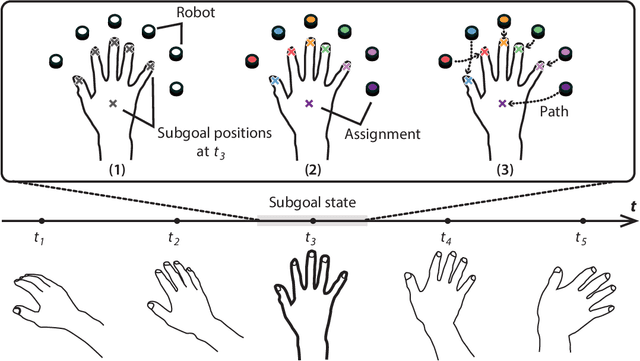

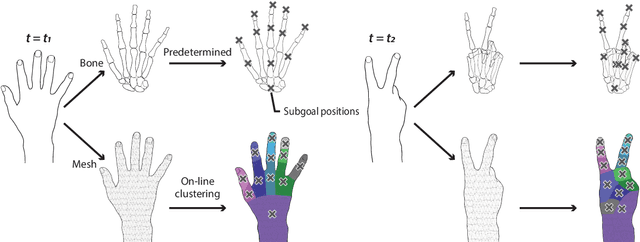
The human brain's plasticity allows for the integration of artificial body parts into the human body. Leveraging this, embodied systems realize intuitive interactions with the environment. We introduce a novel concept: embodied swarm robots. Swarm robots constitute a collective of robots working in harmony to achieve a common objective, in our case, serving as functional body parts. Embodied swarm robots can dynamically alter their shape, density, and the correspondences between body parts and individual robots. We contribute an investigation of the influence on embodiment of swarm robot-specific factors derived from these characteristics, focusing on a hand. Our paper is the first to examine these factors through virtual reality (VR) and real-world robot studies to provide essential design considerations and applications of embodied swarm robots. Through quantitative and qualitative analysis, we identified a system configuration to achieve the embodiment of swarm robots.
Review: Modeling and Classical Controller Of Quad-rotor
Jul 16, 2017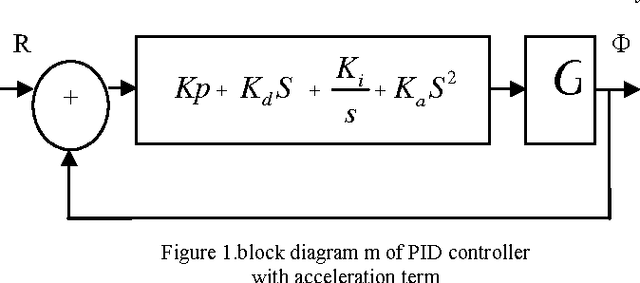
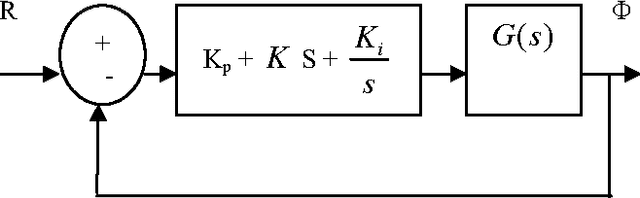
This paper presents an overview of the most effective ideas for the Quad-rotor project. The concept of modeling using different methods is presented. The modeling part presented the nonlinear model, and the concept of linearization using small disturbance theory. Parameter identifications part explained the most important parameters that affect the system stability and tried to get suitable solutions for these problems and identify some parameters experimentally. Data filtration, Kalman filter, Structure design, motor distribution, aerodynamic effect, analysis of shroud and its effect on the resultant thrust were explained. The control part incorporates different classical schemes such as PD and PID controllers to stabilize the Quad-rotor. Also, different ideas are presented to stabilize the quad rotor using PID controllers with some modification to get high maneuverability and better performance.