 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Semantic SLAM with Autonomous Object-Level Data Association
Nov 20, 2020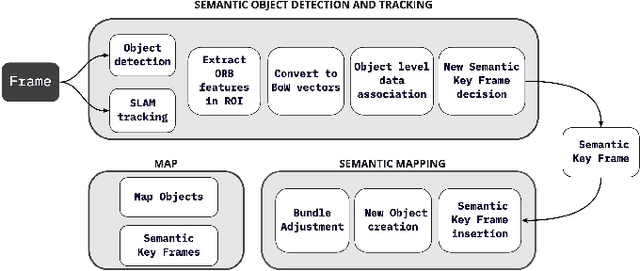
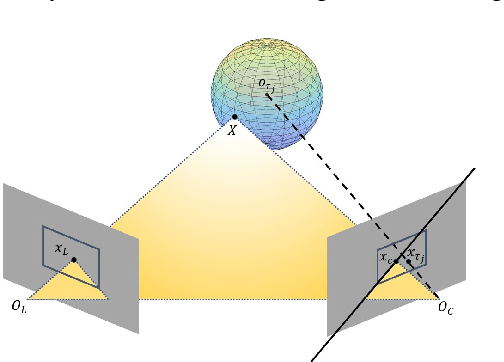
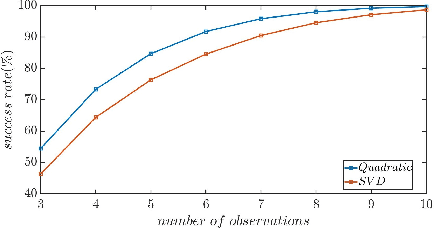
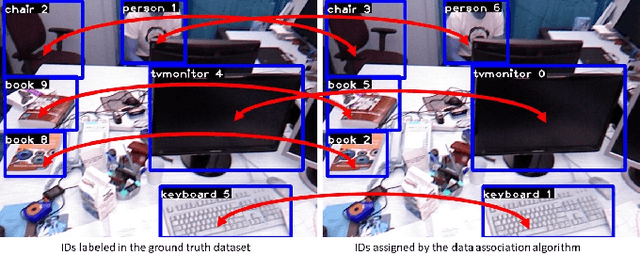
It is often desirable to capture and map semantic information of an environment during simultaneous localization and mapping (SLAM). Such semantic information can enable a robot to better distinguish places with similar low-level geometric and visual features and perform high-level tasks that use semantic information about objects to be manipulated and environments to be navigated. While semantic SLAM has gained increasing attention, there is little research on semanticlevel data association based on semantic objects, i.e., object-level data association. In this paper, we propose a novel object-level data association algorithm based on bag of words algorithm, formulated as a maximum weighted bipartite matching problem. With object-level data association solved, we develop a quadratic-programming-based semantic object initialization scheme using dual quadric and introduce additional constraints to improve the success rate of object initialization. The integrated semantic-level SLAM system can achieve high-accuracy object-level data association and real-time semantic mapping as demonstrated in the experiments. The online semantic map building and semantic-level localization capabilities facilitate semantic-level mapping and task planning in a priori unknown environment.
A surgical system for automatic registration, stiffness mapping and dynamic image overlay
Nov 23, 2017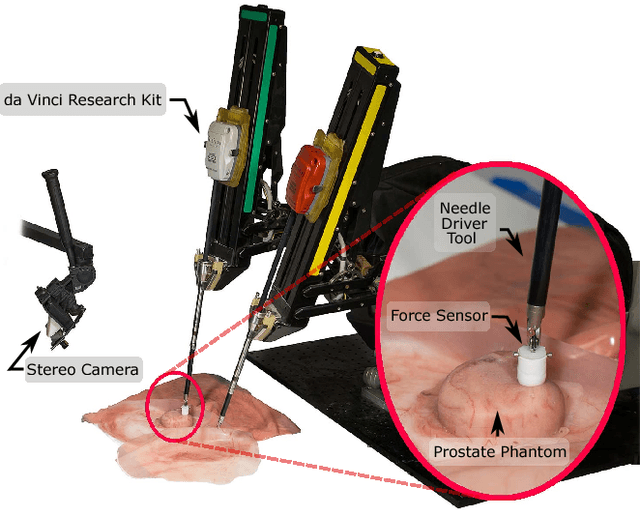
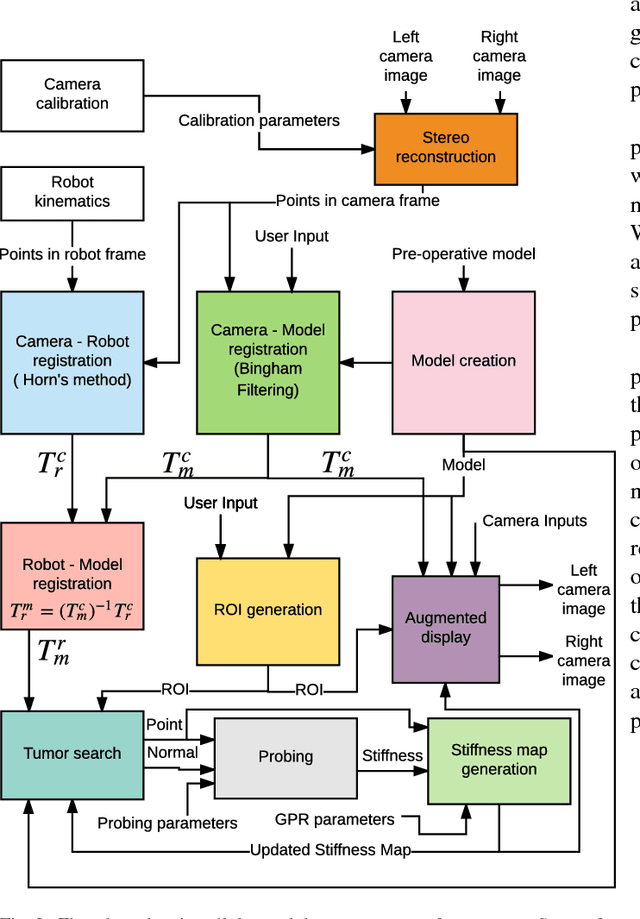
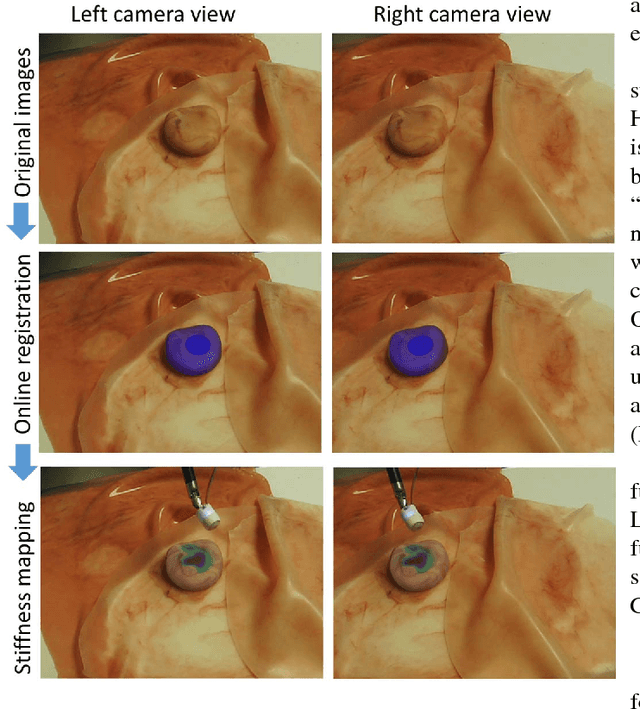
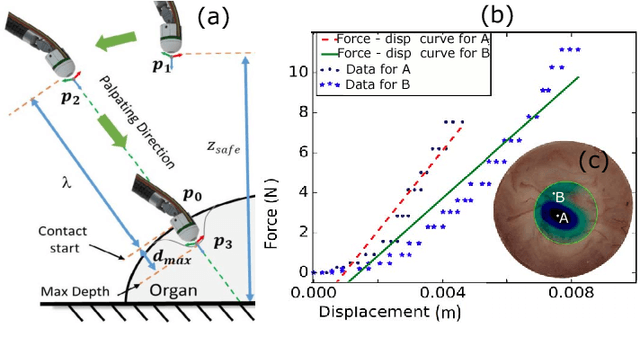
In this paper we develop a surgical system using the da Vinci research kit (dVRK) that is capable of autonomously searching for tumors and dynamically displaying the tumor location using augmented reality. Such a system has the potential to quickly reveal the location and shape of tumors and visually overlay that information to reduce the cognitive overload of the surgeon. We believe that our approach is one of the first to incorporate state-of-the-art methods in registration, force sensing and tumor localization into a unified surgical system. First, the preoperative model is registered to the intra-operative scene using a Bingham distribution-based filtering approach. An active level set estimation is then used to find the location and the shape of the tumors. We use a recently developed miniature force sensor to perform the palpation. The estimated stiffness map is then dynamically overlaid onto the registered preoperative model of the organ. We demonstrate the efficacy of our system by performing experiments on phantom prostate models with embedded stiff inclusions.