 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Accurate Loop Closure Detection in Semantic SLAM with 3D Semantic Covisibility Graphs
Nov 21, 2023


Loop closure is necessary for correcting errors accumulated in simultaneous localization and mapping (SLAM) in unknown environments. However, conventional loop closure methods based on low-level geometric or image features may cause high ambiguity by not distinguishing similar scenarios. Thus, incorrect loop closures can occur. Though semantic 2D image information is considered in some literature to detect loop closures, there is little work that compares 3D scenes as an integral part of a semantic SLAM system. This paper introduces an approach, called SmSLAM+LCD, integrated into a semantic SLAM system to combine high-level 3D semantic information and low-level feature information to conduct accurate loop closure detection and effective drift reduction. The effectiveness of our approach is demonstrated in testing results.
One-shot Joint Extraction, Registration and Segmentation of Neuroimaging Data
Jul 27, 2023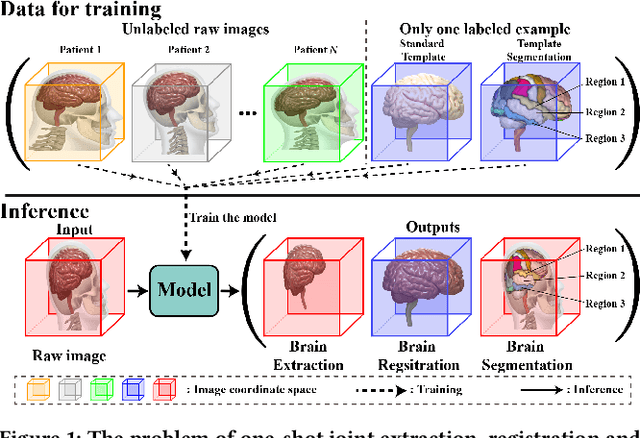
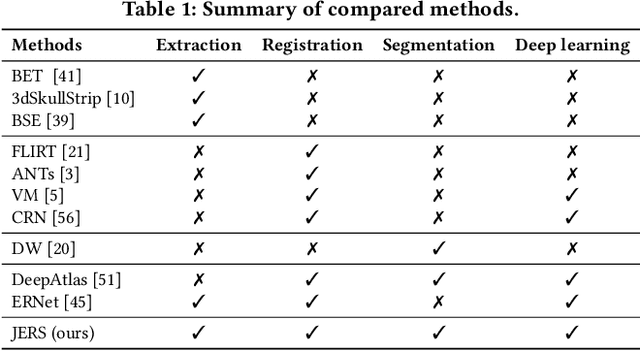
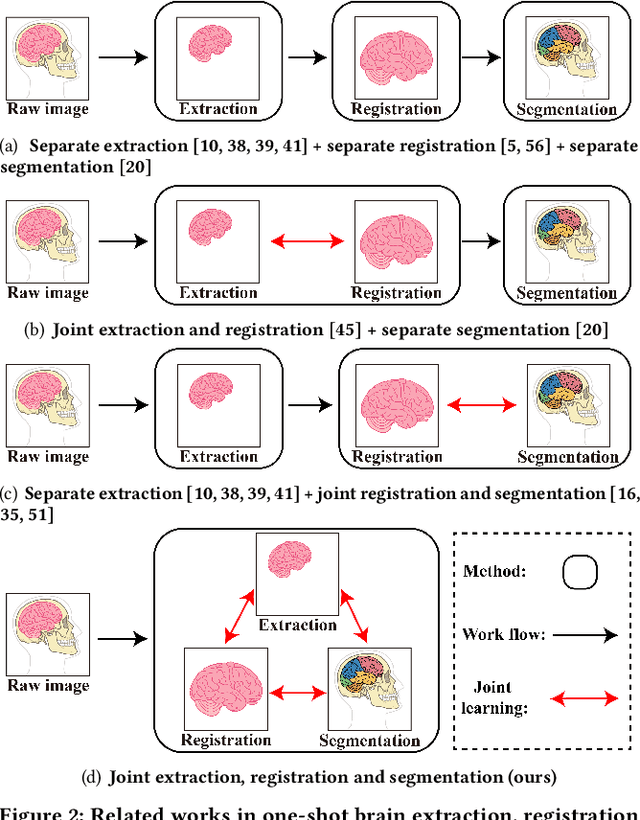
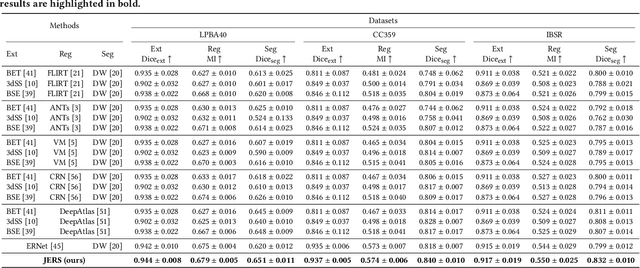
Brain extraction, registration and segmentation are indispensable preprocessing steps in neuroimaging studies. The aim is to extract the brain from raw imaging scans (i.e., extraction step), align it with a target brain image (i.e., registration step) and label the anatomical brain regions (i.e., segmentation step). Conventional studies typically focus on developing separate methods for the extraction, registration and segmentation tasks in a supervised setting. The performance of these methods is largely contingent on the quantity of training samples and the extent of visual inspections carried out by experts for error correction. Nevertheless, collecting voxel-level labels and performing manual quality control on high-dimensional neuroimages (e.g., 3D MRI) are expensive and time-consuming in many medical studies. In this paper, we study the problem of one-shot joint extraction, registration and segmentation in neuroimaging data, which exploits only one labeled template image (a.k.a. atlas) and a few unlabeled raw images for training. We propose a unified end-to-end framework, called JERS, to jointly optimize the extraction, registration and segmentation tasks, allowing feedback among them. Specifically, we use a group of extraction, registration and segmentation modules to learn the extraction mask, transformation and segmentation mask, where modules are interconnected and mutually reinforced by self-supervision. Empirical results on real-world datasets demonstrate that our proposed method performs exceptionally in the extraction, registration and segmentation tasks. Our code and data can be found at https://github.com/Anonymous4545/JERS
Topological Guided Actor-Critic Modular Learning of Continuous Systems with Temporal Objectives
Apr 20, 2023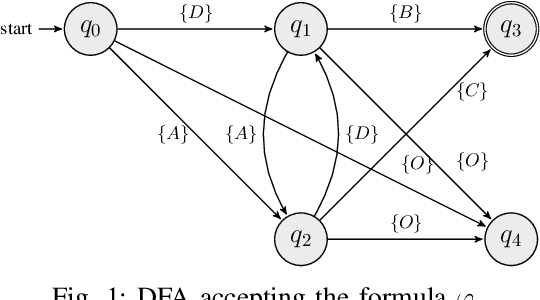
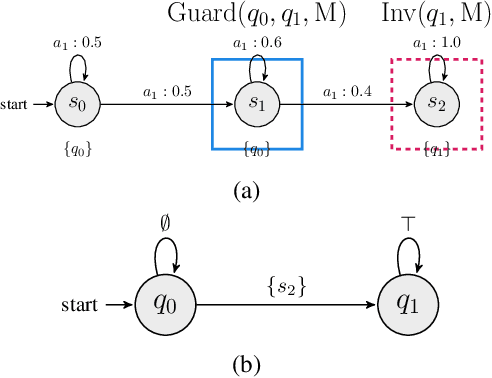
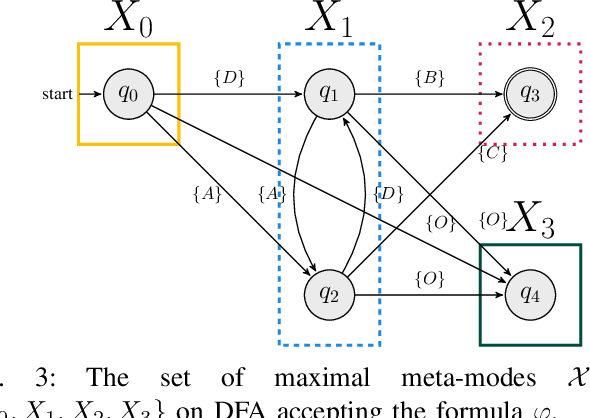
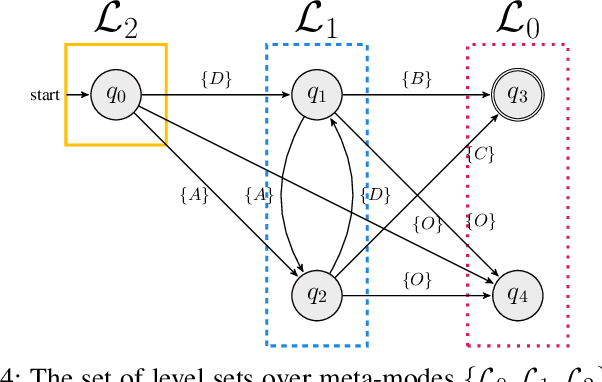
This work investigates the formal policy synthesis of continuous-state stochastic dynamic systems given high-level specifications in linear temporal logic. To learn an optimal policy that maximizes the satisfaction probability, we take a product between a dynamic system and the translated automaton to construct a product system on which we solve an optimal planning problem. Since this product system has a hybrid product state space that results in reward sparsity, we introduce a generalized optimal backup order, in reverse to the topological order, to guide the value backups and accelerate the learning process. We provide the optimality proof for using the generalized optimal backup order in this optimal planning problem. Further, this paper presents an actor-critic reinforcement learning algorithm when topological order applies. This algorithm leverages advanced mathematical techniques and enjoys the property of hyperparameter self-tuning. We provide proof of the optimality and convergence of our proposed reinforcement learning algorithm. We use neural networks to approximate the value function and policy function for hybrid product state space. Furthermore, we observe that assigning integer numbers to automaton states can rank the value or policy function approximated by neural networks. To break the ordinal relationship, we use an individual neural network for each automaton state's value (policy) function, termed modular learning. We conduct two experiments. First, to show the efficacy of our reinforcement learning algorithm, we compare it with baselines on a classic control task, CartPole. Second, we demonstrate the empirical performance of our formal policy synthesis framework on motion planning of a Dubins car with a temporal specification.
Autonomous Search of Semantic Objects in Unknown Environments
Feb 26, 2023



This paper addresses the problem of enabling a robot to search for a semantic object in an unknown and GPS-denied environment. For the robot in the unknown environment to detect and find the target object, it must perform simultaneous localization and mapping (SLAM) at both geometric and semantic levels using its onboard sensors while planning and executing its motion based on the ever-updated SLAM results. In other words, the robot must be able to conduct simultaneous localization, semantic mapping, motion planning, and execution in real-time in the presence of sensing and motion uncertainty. This is an open problem as it combines semantic SLAM based on perception and real-time motion planning and execution under uncertainty. Moreover, the goals of robot motion change on the fly depending on whether and how the robot can detect the target object. We propose a novel approach to tackle the problem, leveraging semantic SLAM, Bayesian Networks, Markov Decision Process, and real-time dynamic planning. The results demonstrate the effectiveness and efficiency of our approach.
ERNet: Unsupervised Collective Extraction and Registration in Neuroimaging Data
Dec 06, 2022



Brain extraction and registration are important preprocessing steps in neuroimaging data analysis, where the goal is to extract the brain regions from MRI scans (i.e., extraction step) and align them with a target brain image (i.e., registration step). Conventional research mainly focuses on developing methods for the extraction and registration tasks separately under supervised settings. The performance of these methods highly depends on the amount of training samples and visual inspections performed by experts for error correction. However, in many medical studies, collecting voxel-level labels and conducting manual quality control in high-dimensional neuroimages (e.g., 3D MRI) are very expensive and time-consuming. Moreover, brain extraction and registration are highly related tasks in neuroimaging data and should be solved collectively. In this paper, we study the problem of unsupervised collective extraction and registration in neuroimaging data. We propose a unified end-to-end framework, called ERNet (Extraction-Registration Network), to jointly optimize the extraction and registration tasks, allowing feedback between them. Specifically, we use a pair of multi-stage extraction and registration modules to learn the extraction mask and transformation, where the extraction network improves the extraction accuracy incrementally and the registration network successively warps the extracted image until it is well-aligned with the target image. Experiment results on real-world datasets show that our proposed method can effectively improve the performance on extraction and registration tasks in neuroimaging data. Our code and data can be found at https://github.com/ERNetERNet/ERNet
Semantic SLAM with Autonomous Object-Level Data Association
Nov 20, 2020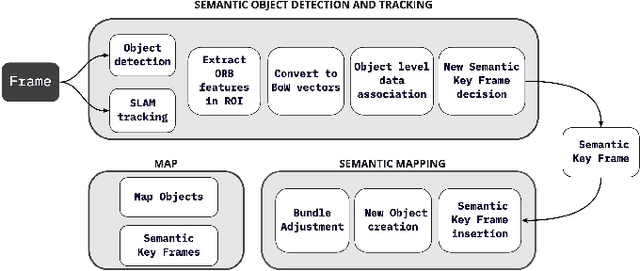
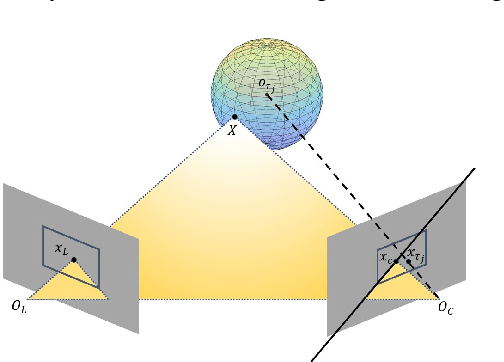
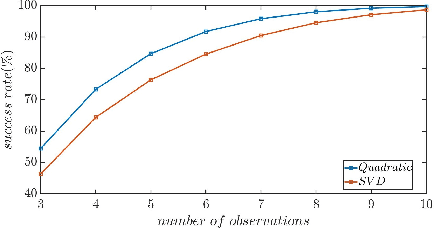
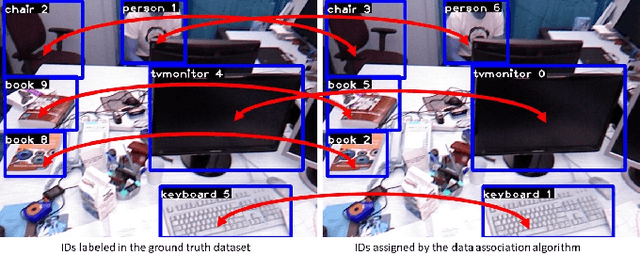
It is often desirable to capture and map semantic information of an environment during simultaneous localization and mapping (SLAM). Such semantic information can enable a robot to better distinguish places with similar low-level geometric and visual features and perform high-level tasks that use semantic information about objects to be manipulated and environments to be navigated. While semantic SLAM has gained increasing attention, there is little research on semanticlevel data association based on semantic objects, i.e., object-level data association. In this paper, we propose a novel object-level data association algorithm based on bag of words algorithm, formulated as a maximum weighted bipartite matching problem. With object-level data association solved, we develop a quadratic-programming-based semantic object initialization scheme using dual quadric and introduce additional constraints to improve the success rate of object initialization. The integrated semantic-level SLAM system can achieve high-accuracy object-level data association and real-time semantic mapping as demonstrated in the experiments. The online semantic map building and semantic-level localization capabilities facilitate semantic-level mapping and task planning in a priori unknown environment.