 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWord Embedding Dimension Reduction via Weakly-Supervised Feature Selection
Jul 17, 2024



As a fundamental task in natural language processing, word embedding converts each word into a representation in a vector space. A challenge with word embedding is that as the vocabulary grows, the vector space's dimension increases and it can lead to a vast model size. Storing and processing word vectors are resource-demanding, especially for mobile edge-devices applications. This paper explores word embedding dimension reduction. To balance computational costs and performance, we propose an efficient and effective weakly-supervised feature selection method, named WordFS. It has two variants, each utilizing novel criteria for feature selection. Experiments conducted on various tasks (e.g., word and sentence similarity and binary and multi-class classification) indicate that the proposed WordFS model outperforms other dimension reduction methods at lower computational costs.
PCa-RadHop: A Transparent and Lightweight Feed-forward Method for Clinically Significant Prostate Cancer Segmentation
Mar 24, 2024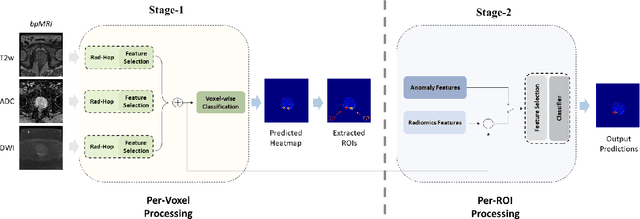
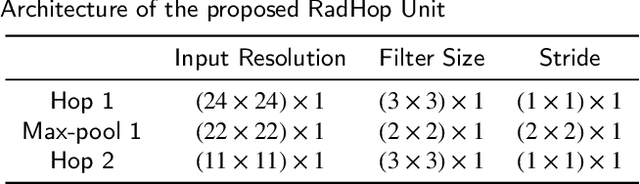

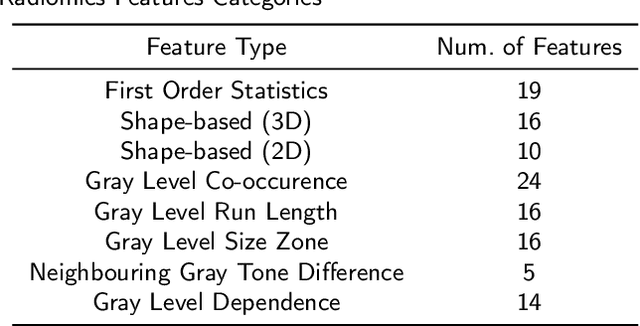
Prostate Cancer is one of the most frequently occurring cancers in men, with a low survival rate if not early diagnosed. PI-RADS reading has a high false positive rate, thus increasing the diagnostic incurred costs and patient discomfort. Deep learning (DL) models achieve a high segmentation performance, although require a large model size and complexity. Also, DL models lack of feature interpretability and are perceived as ``black-boxes" in the medical field. PCa-RadHop pipeline is proposed in this work, aiming to provide a more transparent feature extraction process using a linear model. It adopts the recently introduced Green Learning (GL) paradigm, which offers a small model size and low complexity. PCa-RadHop consists of two stages: Stage-1 extracts data-driven radiomics features from the bi-parametric Magnetic Resonance Imaging (bp-MRI) input and predicts an initial heatmap. To reduce the false positive rate, a subsequent stage-2 is introduced to refine the predictions by including more contextual information and radiomics features from each already detected Region of Interest (ROI). Experiments on the largest publicly available dataset, PI-CAI, show a competitive performance standing of the proposed method among other deep DL models, achieving an area under the curve (AUC) of 0.807 among a cohort of 1,000 patients. Moreover, PCa-RadHop maintains orders of magnitude smaller model size and complexity.
PSHop: A Lightweight Feed-Forward Method for 3D Prostate Gland Segmentation
Mar 24, 2024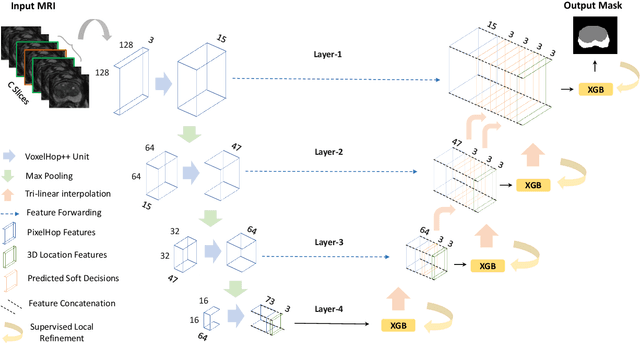
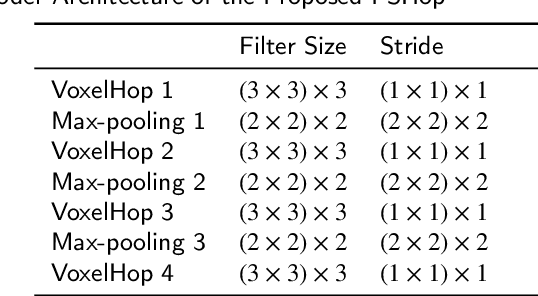
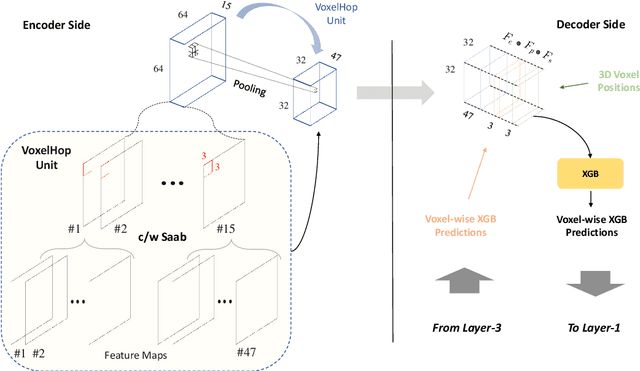
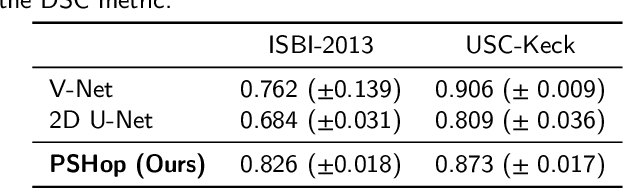
Automatic prostate segmentation is an important step in computer-aided diagnosis of prostate cancer and treatment planning. Existing methods of prostate segmentation are based on deep learning models which have a large size and lack of transparency which is essential for physicians. In this paper, a new data-driven 3D prostate segmentation method on MRI is proposed, named PSHop. Different from deep learning based methods, the core methodology of PSHop is a feed-forward encoder-decoder system based on successive subspace learning (SSL). It consists of two modules: 1) encoder: fine to coarse unsupervised representation learning with cascaded VoxelHop units, 2) decoder: coarse to fine segmentation prediction with voxel-wise classification and local refinement. Experiments are conducted on the publicly available ISBI-2013 dataset, as well as on a larger private one. Experimental analysis shows that our proposed PSHop is effective, robust and lightweight in the tasks of prostate gland and zonal segmentation, achieving a Dice Similarity Coefficient (DSC) of 0.873 for the gland segmentation task. PSHop achieves a competitive performance comparatively to other deep learning methods, while keeping the model size and inference complexity an order of magnitude smaller.
Bias and Fairness in Chatbots: An Overview
Sep 16, 2023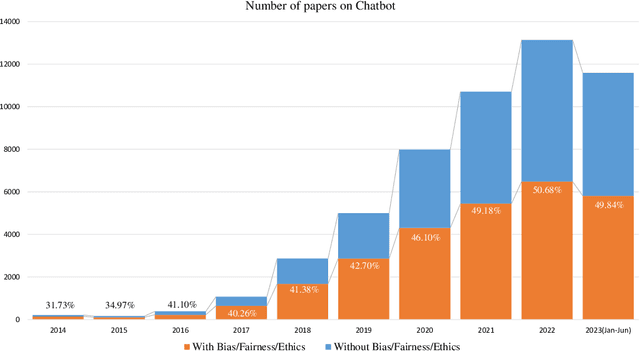
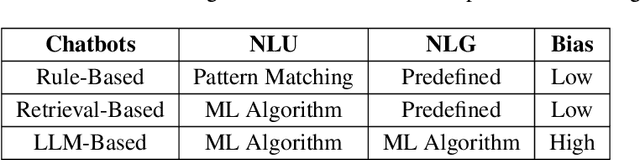
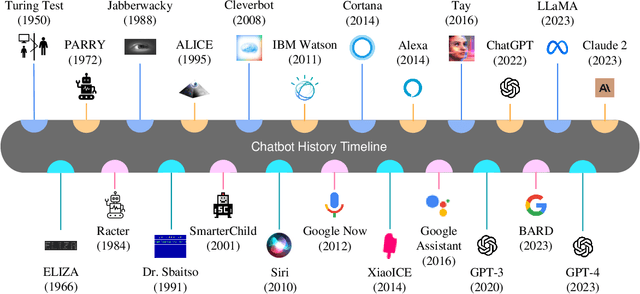
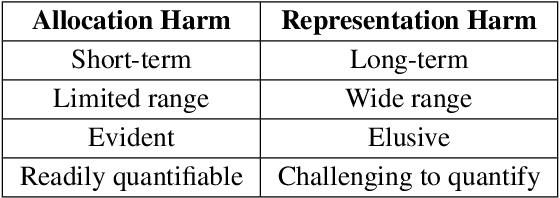
Chatbots have been studied for more than half a century. With the rapid development of natural language processing (NLP) technologies in recent years, chatbots using large language models (LLMs) have received much attention nowadays. Compared with traditional ones, modern chatbots are more powerful and have been used in real-world applications. There are however, bias and fairness concerns in modern chatbot design. Due to the huge amounts of training data, extremely large model sizes, and lack of interpretability, bias mitigation and fairness preservation of modern chatbots are challenging. Thus, a comprehensive overview on bias and fairness in chatbot systems is given in this paper. The history of chatbots and their categories are first reviewed. Then, bias sources and potential harms in applications are analyzed. Considerations in designing fair and unbiased chatbot systems are examined. Finally, future research directions are discussed.
A Tiny Machine Learning Model for Point Cloud Object Classification
Mar 20, 2023


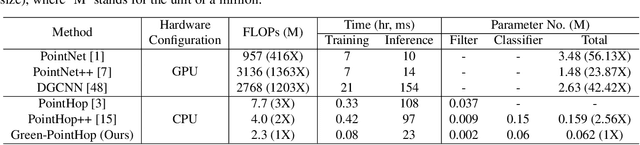
The design of a tiny machine learning model, which can be deployed in mobile and edge devices, for point cloud object classification is investigated in this work. To achieve this objective, we replace the multi-scale representation of a point cloud object with a single-scale representation for complexity reduction, and exploit rich 3D geometric information of a point cloud object for performance improvement. The proposed solution is named Green-PointHop due to its low computational complexity. We evaluate the performance of Green-PointHop on ModelNet40 and ScanObjectNN two datasets. Green-PointHop has a model size of 64K parameters. It demands 2.3M floating-point operations (FLOPs) to classify a ModelNet40 object of 1024 down-sampled points. Its classification performance gaps against the state-of-the-art DGCNN method are 3% and 7% for ModelNet40 and ScanObjectNN, respectively. On the other hand, the model size and inference complexity of DGCNN are 42X and 1203X of those of Green-PointHop, respectively.
S3I-PointHop: SO-Invariant PointHop for 3D Point Cloud Classification
Feb 22, 2023Many point cloud classification methods are developed under the assumption that all point clouds in the dataset are well aligned with the canonical axes so that the 3D Cartesian point coordinates can be employed to learn features. When input point clouds are not aligned, the classification performance drops significantly. In this work, we focus on a mathematically transparent point cloud classification method called PointHop, analyze its reason for failure due to pose variations, and solve the problem by replacing its pose dependent modules with rotation invariant counterparts. The proposed method is named SO(3)-Invariant PointHop (or S3I-PointHop in short). We also significantly simplify the PointHop pipeline using only one single hop along with multiple spatial aggregation techniques. The idea of exploiting more spatial information is novel. Experiments on the ModelNet40 dataset demonstrate the superiority of S3I-PointHop over traditional PointHop-like methods.