 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Next-Frame Prediction: Autoregressive Video Modeling Encodes Effective Representations
Dec 24, 2025



Recent advances in pretraining general foundation models have significantly improved performance across diverse downstream tasks. While autoregressive (AR) generative models like GPT have revolutionized NLP, most visual generative pretraining methods still rely on BERT-style masked modeling, which often disregards the temporal information essential for video analysis. The few existing autoregressive visual pretraining methods suffer from issues such as inaccurate semantic localization and poor generation quality, leading to poor semantics. In this work, we propose NExT-Vid, a novel autoregressive visual generative pretraining framework that utilizes masked next-frame prediction to jointly model images and videos. NExT-Vid introduces a context-isolated autoregressive predictor to decouple semantic representation from target decoding, and a conditioned flow-matching decoder to enhance generation quality and diversity. Through context-isolated flow-matching pretraining, our approach achieves strong representations. Extensive experiments on large-scale pretrained models demonstrate that our proposed method consistently outperforms previous generative pretraining methods for visual representation learning via attentive probing in downstream classification.
AdaViP: Aligning Multi-modal LLMs via Adaptive Vision-enhanced Preference Optimization
Apr 22, 2025Preference alignment through Direct Preference Optimization (DPO) has demonstrated significant effectiveness in aligning multimodal large language models (MLLMs) with human preferences. However, existing methods focus primarily on language preferences while neglecting the critical visual context. In this paper, we propose an Adaptive Vision-enhanced Preference optimization (AdaViP) that addresses these limitations through two key innovations: (1) vision-based preference pair construction, which integrates multiple visual foundation models to strategically remove key visual elements from the image, enhancing MLLMs' sensitivity to visual details; and (2) adaptive preference optimization that dynamically balances vision- and language-based preferences for more accurate alignment. Extensive evaluations across different benchmarks demonstrate our effectiveness. Notably, our AdaViP-7B achieves 93.7% and 96.4% reductions in response-level and mentioned-level hallucination respectively on the Object HalBench, significantly outperforming current state-of-the-art methods.
DAMO: Data- and Model-aware Alignment of Multi-modal LLMs
Feb 04, 2025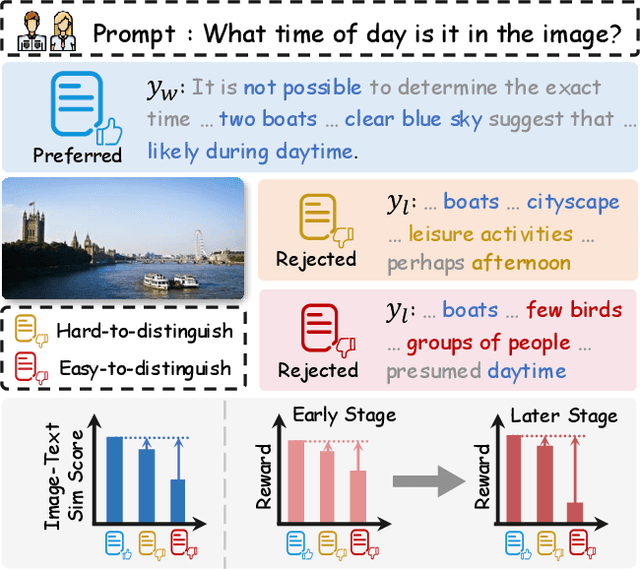
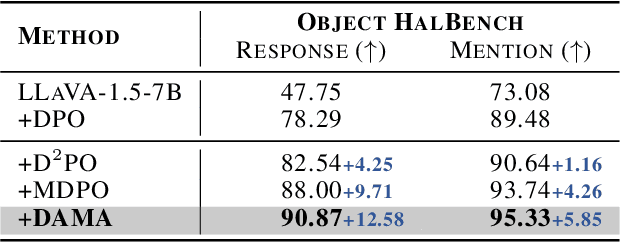

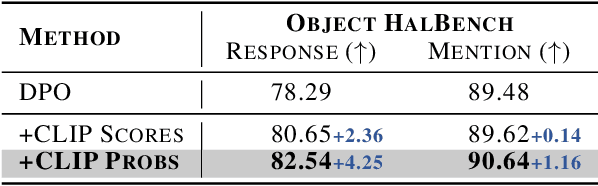
Direct Preference Optimization (DPO) has shown effectiveness in aligning multi-modal large language models (MLLM) with human preferences. However, existing methods exhibit an imbalanced responsiveness to the data of varying hardness, tending to overfit on the easy-to-distinguish data while underfitting on the hard-to-distinguish data. In this paper, we propose Data- and Model-aware DPO (DAMO) to dynamically adjust the optimization process from two key aspects: (1) a data-aware strategy that incorporates data hardness, and (2) a model-aware strategy that integrates real-time model responses. By combining the two strategies, DAMO enables the model to effectively adapt to data with varying levels of hardness. Extensive experiments on five benchmarks demonstrate that DAMO not only significantly enhances the trustworthiness, but also improves the effectiveness over general tasks. For instance, on the Object HalBench, our DAMO-7B reduces response-level and mentioned-level hallucination by 90.0% and 95.3%, respectively, surpassing the performance of GPT-4V.
DiffGAD: A Diffusion-based Unsupervised Graph Anomaly Detector
Oct 09, 2024



Graph Anomaly Detection (GAD) is crucial for identifying abnormal entities within networks, garnering significant attention across various fields. Traditional unsupervised methods, which decode encoded latent representations of unlabeled data with a reconstruction focus, often fail to capture critical discriminative content, leading to suboptimal anomaly detection. To address these challenges, we present a Diffusion-based Graph Anomaly Detector (DiffGAD). At the heart of DiffGAD is a novel latent space learning paradigm, meticulously designed to enhance its proficiency by guiding it with discriminative content. This innovative approach leverages diffusion sampling to infuse the latent space with discriminative content and introduces a content-preservation mechanism that retains valuable information across different scales, significantly improving its adeptness at identifying anomalies with limited time and space complexity. Our comprehensive evaluation of DiffGAD, conducted on six real-world and large-scale datasets with various metrics, demonstrated its exceptional performance.
Closed-loop Long-horizon Robotic Planning via Equilibrium Sequence Modeling
Oct 02, 2024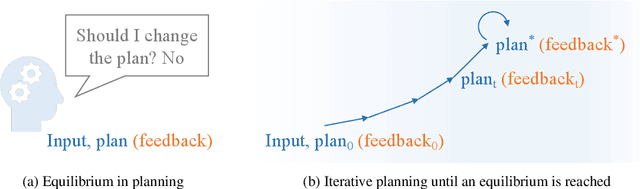

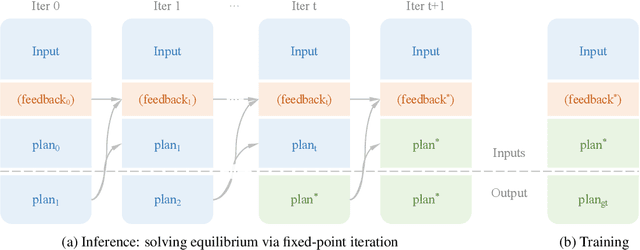
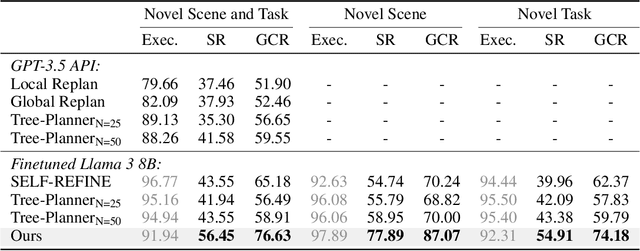
In the endeavor to make autonomous robots take actions, task planning is a major challenge that requires translating high-level task descriptions into long-horizon action sequences. Despite recent advances in language model agents, they remain prone to planning errors and limited in their ability to plan ahead. To address these limitations in robotic planning, we advocate a self-refining scheme that iteratively refines a draft plan until an equilibrium is reached. Remarkably, this process can be optimized end-to-end from an analytical perspective without the need to curate additional verifiers or reward models, allowing us to train self-refining planners in a simple supervised learning fashion. Meanwhile, a nested equilibrium sequence modeling procedure is devised for efficient closed-loop planning that incorporates useful feedback from the environment (or an internal world model). Our method is evaluated on the VirtualHome-Env benchmark, showing advanced performance with better scaling for inference computation. Code is available at https://github.com/Singularity0104/equilibrium-planner.