 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLDDR: Linear-DPP-Based Dynamic-Resolution Frame Sampling for Video MLLMs
May 12, 2026Video understanding in multimodal large language models requires selecting informative frames from long, redundant videos under limited visual-token budgets. Existing methods often rely on uniform sampling, point-wise relevance scoring, chunk-wise selection, or agentic exploration, which either miss global dependencies or introduce substantial overhead. We propose LDDR (Linear DPP-Based Dynamic Resolution), a training-free, plug-and-play, and budget-aware video frame sampling framework. LDDR performs query-aware Determinantal Point Process (DPP) frame selection in a task-conditioned feature space, achieving a 3x runtime speedup over standard DPP baselines. It further introduces a Group DPP importance metric to guide frame retention and dynamic resolution allocation, assigning more tokens to informative, non-redundant frames while downscaling or pruning less useful ones. Across four video benchmarks spanning short-, medium-, and long-range videos, LDDR consistently outperforms the next-best baselines, achieving gains of 2.5 points under budget-constrained settings and 1.6 points in high-budget scenarios. These improvements are consistently observed across multiple MLLM backbones, including both open- and closed-source models. Qualitative analysis confirms that relevant frames are selected and allocated a higher budget, facilitating improved video understanding.
ArbiViewGen: Controllable Arbitrary Viewpoint Camera Data Generation for Autonomous Driving via Stable Diffusion Models
Aug 07, 2025



Arbitrary viewpoint image generation holds significant potential for autonomous driving, yet remains a challenging task due to the lack of ground-truth data for extrapolated views, which hampers the training of high-fidelity generative models. In this work, we propose Arbiviewgen, a novel diffusion-based framework for the generation of controllable camera images from arbitrary points of view. To address the absence of ground-truth data in unseen views, we introduce two key components: Feature-Aware Adaptive View Stitching (FAVS) and Cross-View Consistency Self-Supervised Learning (CVC-SSL). FAVS employs a hierarchical matching strategy that first establishes coarse geometric correspondences using camera poses, then performs fine-grained alignment through improved feature matching algorithms, and identifies high-confidence matching regions via clustering analysis. Building upon this, CVC-SSL adopts a self-supervised training paradigm where the model reconstructs the original camera views from the synthesized stitched images using a diffusion model, enforcing cross-view consistency without requiring supervision from extrapolated data. Our framework requires only multi-camera images and their associated poses for training, eliminating the need for additional sensors or depth maps. To our knowledge, Arbiviewgen is the first method capable of controllable arbitrary view camera image generation in multiple vehicle configurations.
Atomic Consistency Preference Optimization for Long-Form Question Answering
May 14, 2025Large Language Models (LLMs) frequently produce factoid hallucinations - plausible yet incorrect answers. A common mitigation strategy is model alignment, which improves factual accuracy by training on curated factual and non-factual pairs. However, this approach often relies on a stronger model (e.g., GPT-4) or an external knowledge base to assess factual correctness, which may not always be accessible. To address this, we propose Atomic Consistency Preference Optimization (ACPO), a self-supervised preference-tuning method that enhances factual accuracy without external supervision. ACPO leverages atomic consistency signals, i.e., the agreement of individual facts across multiple stochastic responses, to identify high- and low-quality data pairs for model alignment. By eliminating the need for costly GPT calls, ACPO provides a scalable and efficient approach to improving factoid question-answering. Despite being self-supervised, empirical results demonstrate that ACPO outperforms FactAlign, a strong supervised alignment baseline, by 1.95 points on the LongFact and BioGen datasets, highlighting its effectiveness in enhancing factual reliability without relying on external models or knowledge bases.
Space-Time-Modulated Wideband Radiation-Type Programmable Metasurface for Low Sidelobe Beamforming
Dec 06, 2024



Programmable metasurfaces promise a great potential to construct low-cost phased array systems due to the capability of elaborate modulation over electromagnetic (EM) waves. However, they are in either reflective or transmissive mode, and usually possess a relatively high profile as a result of the external feed source. Besides, it is difficult to conduct multibit phase shift in metasurfaces, when comparing with conventional phased arrays. Here, we propose a strategy of space-time modulated wideband radiation-type programmable metasurface for low side-lobe beamforming. The wideband programmable metasurface avoids the space-feed external source required by its traditional counterpart, thus achieving a significant reduction of profile through integration of a highefficiency microwave-fed excitation network and metasurface. Furthermore, through introducing space-time-modulated strategy, the high-accuracy amplitude-phase weight algorithm can also be synchronously carried out on the first harmonic component for low side-lobe beam-scanning. Most importantly, adaptive beamforming and generation of interference null can further be created after analyzing the harmonic component characteristics of received signals.
FinML-Chain: A Blockchain-Integrated Dataset for Enhanced Financial Machine Learning
Nov 25, 2024
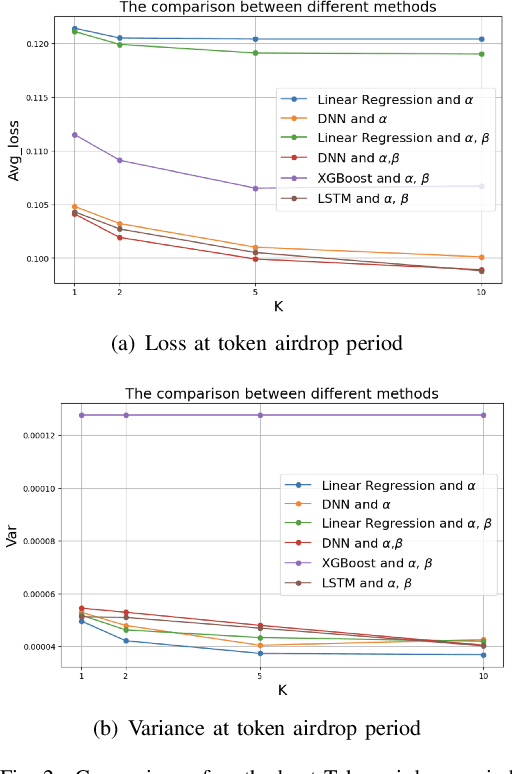
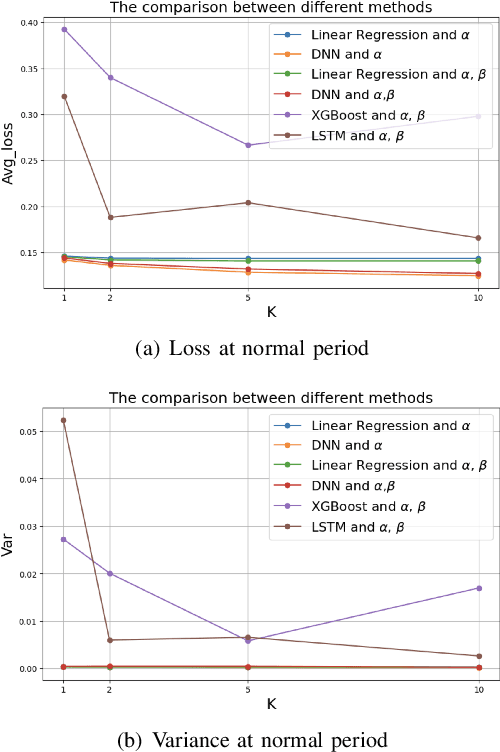

Machine learning is critical for innovation and efficiency in financial markets, offering predictive models and data-driven decision-making. However, challenges such as missing data, lack of transparency, untimely updates, insecurity, and incompatible data sources limit its effectiveness. Blockchain technology, with its transparency, immutability, and real-time updates, addresses these challenges. We present a framework for integrating high-frequency on-chain data with low-frequency off-chain data, providing a benchmark for addressing novel research questions in economic mechanism design. This framework generates modular, extensible datasets for analyzing economic mechanisms such as the Transaction Fee Mechanism, enabling multi-modal insights and fairness-driven evaluations. Using four machine learning techniques, including linear regression, deep neural networks, XGBoost, and LSTM models, we demonstrate the framework's ability to produce datasets that advance financial research and improve understanding of blockchain-driven systems. Our contributions include: (1) proposing a research scenario for the Transaction Fee Mechanism and demonstrating how the framework addresses previously unexplored questions in economic mechanism design; (2) providing a benchmark for financial machine learning by open-sourcing a sample dataset generated by the framework and the code for the pipeline, enabling continuous dataset expansion; and (3) promoting reproducibility, transparency, and collaboration by fully open-sourcing the framework and its outputs. This initiative supports researchers in extending our work and developing innovative financial machine-learning models, fostering advancements at the intersection of machine learning, blockchain, and economics.
Multiple Intelligent Reflecting Surfaces Collaborative Wireless Localization System
Jun 17, 2024This paper studies a multiple intelligent reflecting surfaces (IRSs) collaborative localization system where multiple semi-passive IRSs are deployed in the network to locate one or more targets based on time-of-arrival. It is assumed that each semi-passive IRS is equipped with reflective elements and sensors, which are used to establish the line-of-sight links from the base station (BS) to multiple targets and process echo signals, respectively. Based on the above model, we derive the Fisher information matrix of the echo signal with respect to the time delay. By employing the chain rule and exploiting the geometric relationship between time delay and position, the Cramer-Rao bound (CRB) for estimating the target's Cartesian coordinate position is derived. Then, we propose a two-stage algorithmic framework to minimize CRB in single- and multi-target localization systems by joint optimizing active beamforming at BS, passive beamforming at multiple IRSs and IRS selection. For the single-target case, we derive the optimal closed-form solution for multiple IRSs coefficients design and propose a lowcomplexity algorithm based on alternating direction method of multipliers to obtain the optimal solution for active beaming design. For the multi-target case, alternating optimization is used to transform the original problem into two subproblems where semi-definite relaxation and successive convex approximation are applied to tackle the quadraticity and indefiniteness in the CRB expression, respectively. Finally, numerical simulation results validate the effectiveness of the proposed algorithm for multiple IRSs collaborative localization system compared to other benchmark schemes as well as the significant performance gains.