 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Enhanced Grey Wolf Optimizer with Elite Inheritance and Balance Search Mechanisms
Apr 09, 2024The Grey Wolf Optimizer (GWO) is recognized as a novel meta-heuristic algorithm inspired by the social leadership hierarchy and hunting mechanism of grey wolves. It is well-known for its simple parameter setting, fast convergence speed, and strong optimization capability. In the original GWO, there are two significant design flaws in its fundamental optimization mechanisms. Problem (1): the algorithm fails to inherit from elite positions from the last iteration when generating the next positions of the wolf population, potentially leading to suboptimal solutions. Problem (2): the positions of the population are updated based on the central position of the three leading wolves (alpha, beta, delta), without a balanced mechanism between local and global search. To tackle these problems, an enhanced Grey Wolf Optimizer with Elite Inheritance Mechanism and Balance Search Mechanism, named as EBGWO, is proposed to improve the effectiveness of the position updating and the quality of the convergence solutions. The IEEE CEC 2014 benchmark functions suite and a series of simulation tests are employed to evaluate the performance of the proposed algorithm. The simulation tests involve a comparative study between EBGWO, three GWO variants, GWO and two well-known meta-heuristic algorithms. The experimental results demonstrate that the proposed EBGWO algorithm outperforms other meta-heuristic algorithms in both accuracy and convergence speed. Three engineering optimization problems are adopted to prove its capability in processing real-world problems. The results indicate that the proposed EBGWO outperforms several popular algorithms.
Soft Prompt Guided Joint Learning for Cross-Domain Sentiment Analysis
Mar 01, 2023

Aspect term extraction is a fundamental task in fine-grained sentiment analysis, which aims at detecting customer's opinion targets from reviews on product or service. The traditional supervised models can achieve promising results with annotated datasets, however, the performance dramatically decreases when they are applied to the task of cross-domain aspect term extraction. Existing cross-domain transfer learning methods either directly inject linguistic features into Language models, making it difficult to transfer linguistic knowledge to target domain, or rely on the fixed predefined prompts, which is time-consuming to construct the prompts over all potential aspect term spans. To resolve the limitations, we propose a soft prompt-based joint learning method for cross domain aspect term extraction in this paper. Specifically, by incorporating external linguistic features, the proposed method learn domain-invariant representations between source and target domains via multiple objectives, which bridges the gap between domains with varied distributions of aspect terms. Further, the proposed method interpolates a set of transferable soft prompts consisted of multiple learnable vectors that are beneficial to detect aspect terms in target domain. Extensive experiments are conducted on the benchmark datasets and the experimental results demonstrate the effectiveness of the proposed method for cross-domain aspect terms extraction.
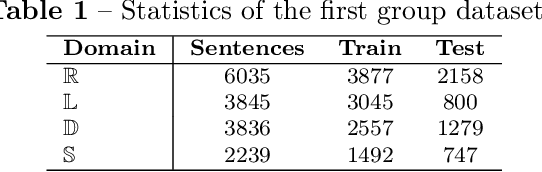
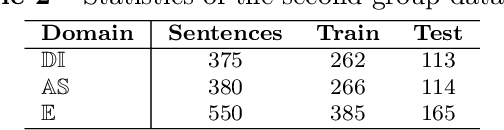
KATSum: Knowledge-aware Abstractive Text Summarization
Dec 06, 2022

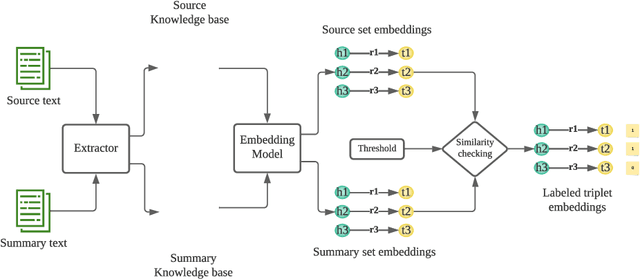

Text Summarization is recognised as one of the NLP downstream tasks and it has been extensively investigated in recent years. It can assist people with perceiving the information rapidly from the Internet, including news articles, social posts, videos, etc. Most existing research works attempt to develop summarization models to produce a better output. However, advent limitations of most existing models emerge, including unfaithfulness and factual errors. In this paper, we propose a novel model, named as Knowledge-aware Abstractive Text Summarization, which leverages the advantages offered by Knowledge Graph to enhance the standard Seq2Seq model. On top of that, the Knowledge Graph triplets are extracted from the source text and utilised to provide keywords with relational information, producing coherent and factually errorless summaries. We conduct extensive experiments by using real-world data sets. The results reveal that the proposed framework can effectively utilise the information from Knowledge Graph and significantly reduce the factual errors in the summary.
Swinv2-Imagen: Hierarchical Vision Transformer Diffusion Models for Text-to-Image Generation
Oct 18, 2022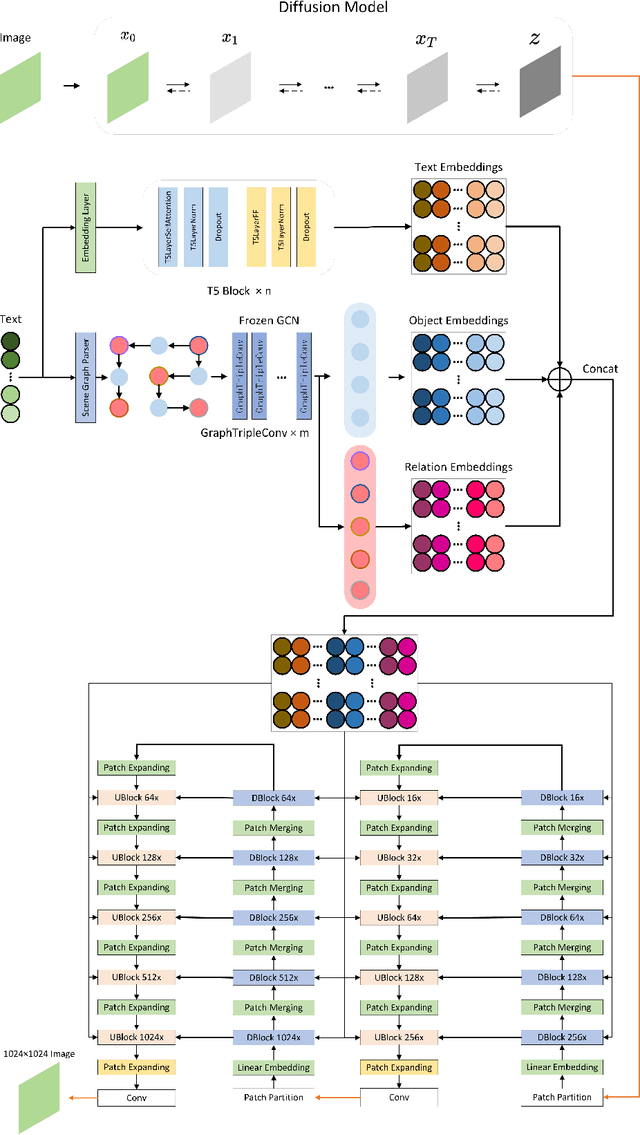
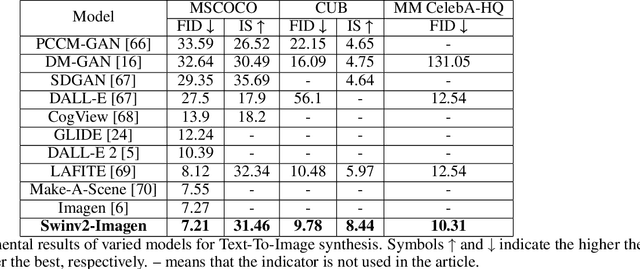
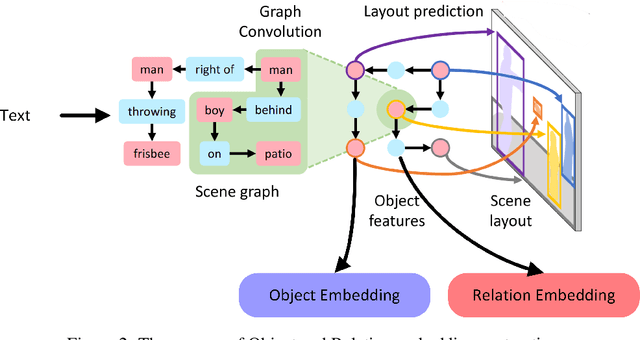
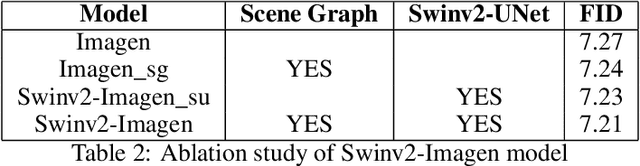
Recently, diffusion models have been proven to perform remarkably well in text-to-image synthesis tasks in a number of studies, immediately presenting new study opportunities for image generation. Google's Imagen follows this research trend and outperforms DALLE2 as the best model for text-to-image generation. However, Imagen merely uses a T5 language model for text processing, which cannot ensure learning the semantic information of the text. Furthermore, the Efficient UNet leveraged by Imagen is not the best choice in image processing. To address these issues, we propose the Swinv2-Imagen, a novel text-to-image diffusion model based on a Hierarchical Visual Transformer and a Scene Graph incorporating a semantic layout. In the proposed model, the feature vectors of entities and relationships are extracted and involved in the diffusion model, effectively improving the quality of generated images. On top of that, we also introduce a Swin-Transformer-based UNet architecture, called Swinv2-Unet, which can address the problems stemming from the CNN convolution operations. Extensive experiments are conducted to evaluate the performance of the proposed model by using three real-world datasets, i.e., MSCOCO, CUB and MM-CelebA-HQ. The experimental results show that the proposed Swinv2-Imagen model outperforms several popular state-of-the-art methods.
Improve Generalization of Driving Policy at Signalized Intersections with Adversarial Learning
Apr 09, 2022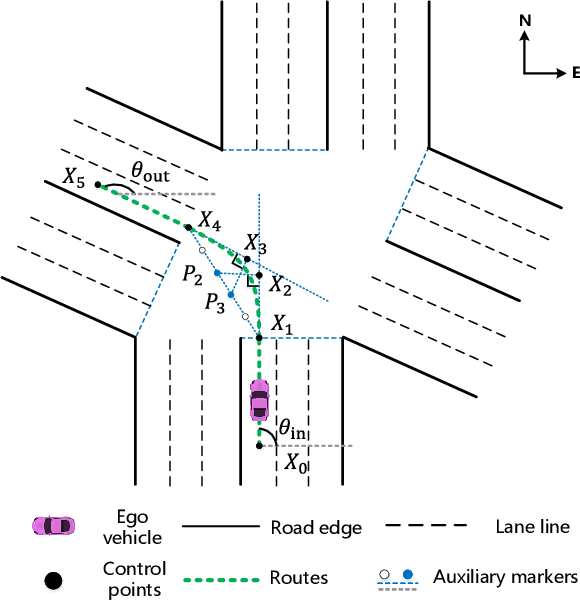
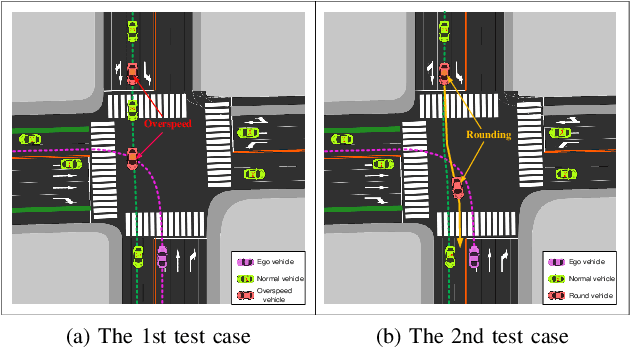
Intersections are quite challenging among various driving scenes wherein the interaction of signal lights and distinct traffic actors poses great difficulty to learn a wise and robust driving policy. Current research rarely considers the diversity of intersections and stochastic behaviors of traffic participants. For practical applications, the randomness usually leads to some devastating events, which should be the focus of autonomous driving. This paper introduces an adversarial learning paradigm to boost the intelligence and robustness of driving policy for signalized intersections with dense traffic flow. Firstly, we design a static path planner which is capable of generating trackable candidate paths for multiple intersections with diversified topology. Next, a constrained optimal control problem (COCP) is built based on these candidate paths wherein the bounded uncertainty of dynamic models is considered to capture the randomness of driving environment. We propose adversarial policy gradient (APG) to solve the COCP wherein the adversarial policy is introduced to provide disturbances by seeking the most severe uncertainty while the driving policy learns to handle this situation by competition. Finally, a comprehensive system is established to conduct training and testing wherein the perception module is introduced and the human experience is incorporated to solve the yellow light dilemma. Experiments indicate that the trained policy can handle the signal lights flexibly meanwhile realizing the smooth and efficient passing with a humanoid paradigm. Besides, APG enables a large-margin improvement of the resistance to the abnormal behaviors and thus ensures a high safety level for the autonomous vehicle.
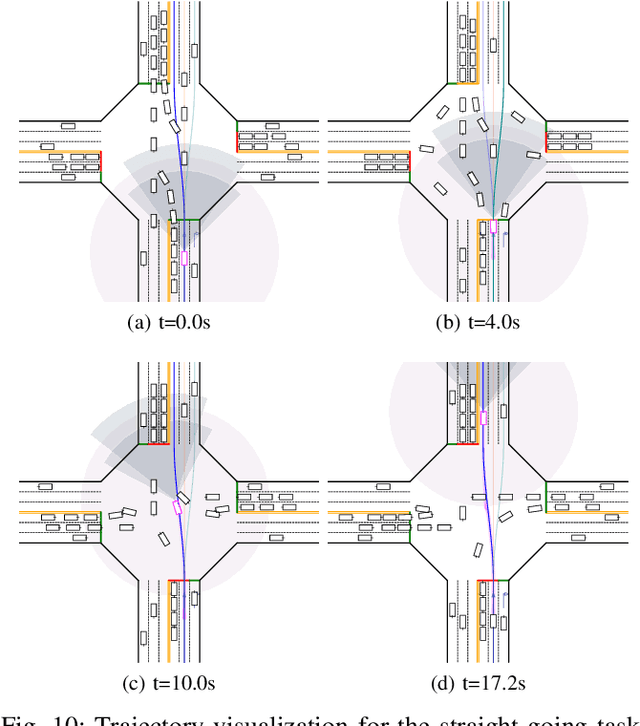
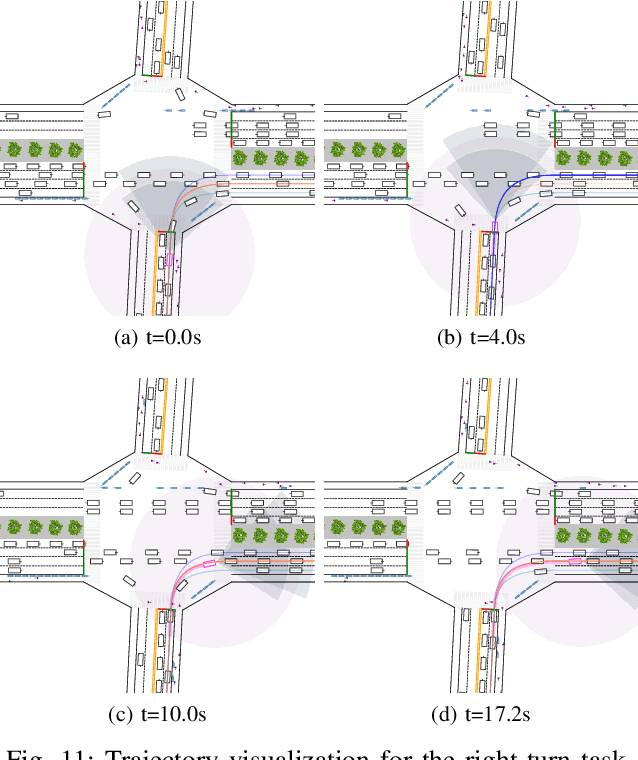
Self-learned Intelligence for Integrated Decision and Control of Automated Vehicles at Signalized Intersections
Nov 10, 2021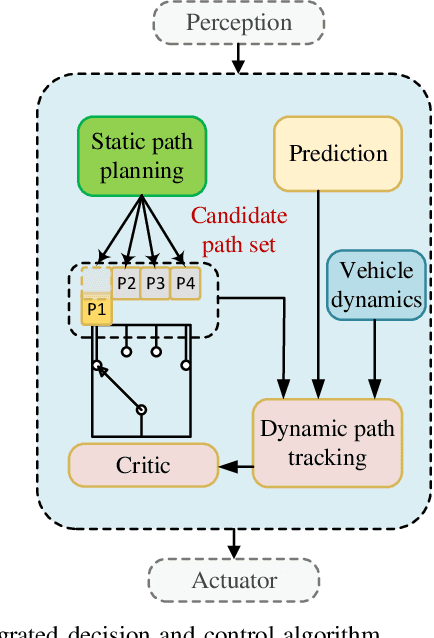
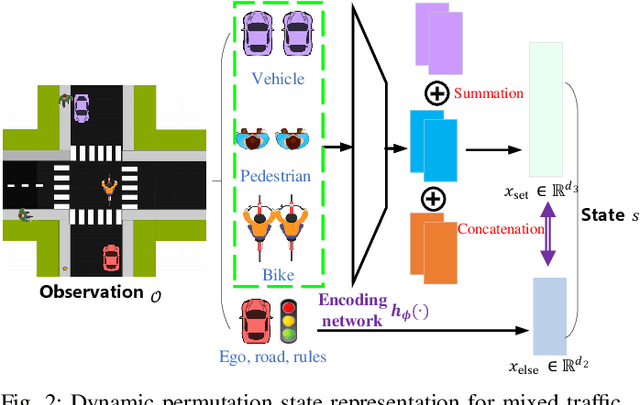
Intersection is one of the most complex and accident-prone urban scenarios for autonomous driving wherein making safe and computationally efficient decisions is non-trivial. Current research mainly focuses on the simplified traffic conditions while ignoring the existence of mixed traffic flows, i.e., vehicles, cyclists and pedestrians. For urban roads, different participants leads to a quite dynamic and complex interaction, posing great difficulty to learn an intelligent policy. This paper develops the dynamic permutation state representation in the framework of integrated decision and control (IDC) to handle signalized intersections with mixed traffic flows. Specially, this representation introduces an encoding function and summation operator to construct driving states from environmental observation, capable of dealing with different types and variant number of traffic participants. A constrained optimal control problem is built wherein the objective involves tracking performance and the constraints for different participants and signal lights are designed respectively to assure safety. We solve this problem by offline optimizing encoding function, value function and policy function, wherein the reasonable state representation will be given by the encoding function and then served as the input of policy and value function. An off-policy training is designed to reuse observations from driving environment and backpropagation through time is utilized to update the policy function and encoding function jointly. Verification result shows that the dynamic permutation state representation can enhance the driving performance of IDC, including comfort, decision compliance and safety with a large margin. The trained driving policy can realize efficient and smooth passing in the complex intersection, guaranteeing driving intelligence and safety simultaneously.
Integrated Decision and Control at Multi-Lane Intersections with Mixed Traffic Flow
Aug 30, 2021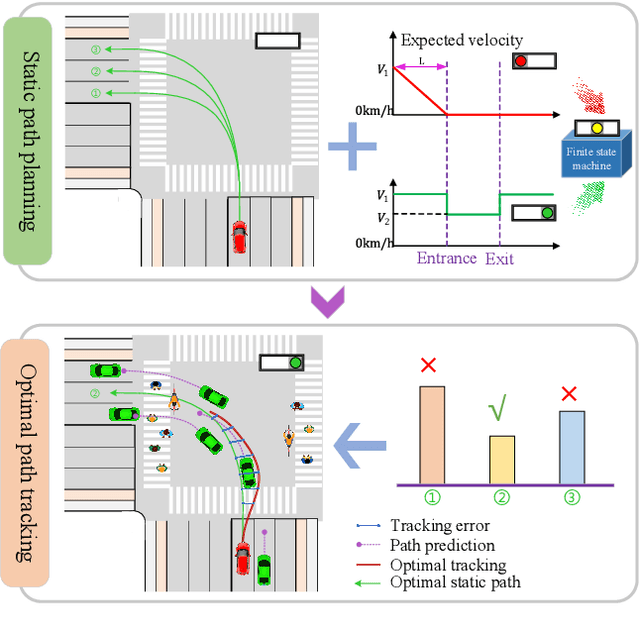
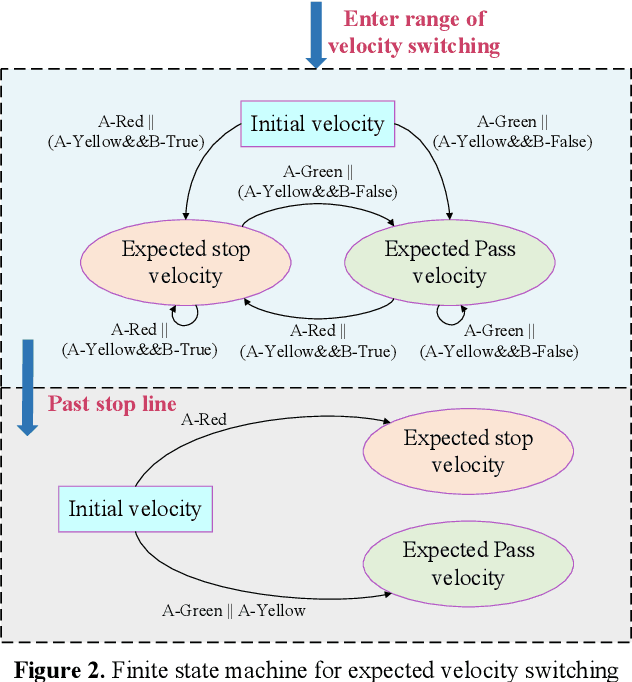
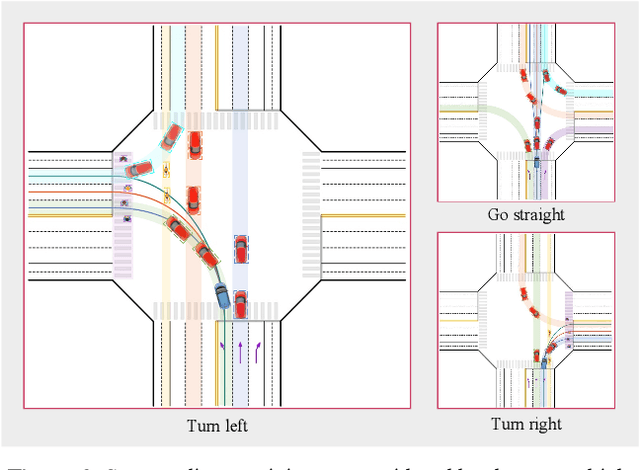
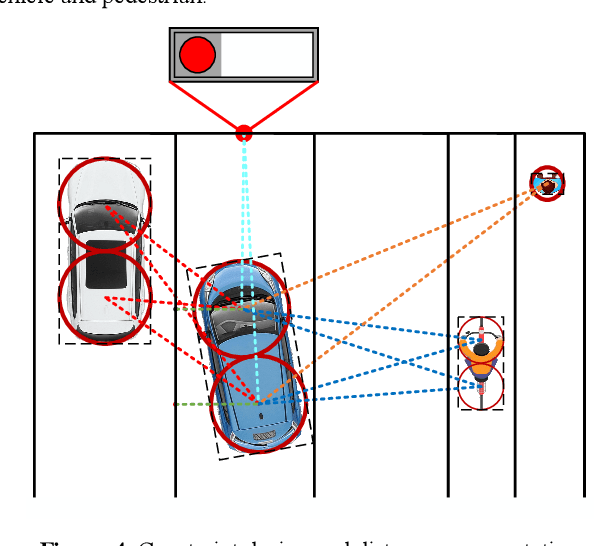
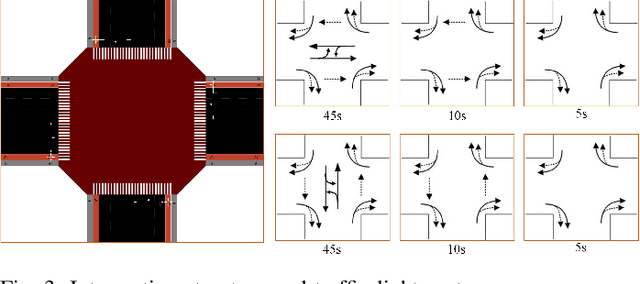
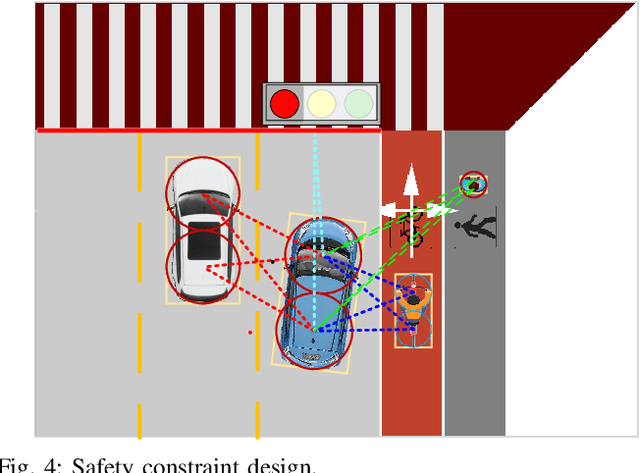
Autonomous driving at intersections is one of the most complicated and accident-prone traffic scenarios, especially with mixed traffic participants such as vehicles, bicycles and pedestrians. The driving policy should make safe decisions to handle the dynamic traffic conditions and meet the requirements of on-board computation. However, most of the current researches focuses on simplified intersections considering only the surrounding vehicles and idealized traffic lights. This paper improves the integrated decision and control framework and develops a learning-based algorithm to deal with complex intersections with mixed traffic flows, which can not only take account of realistic characteristics of traffic lights, but also learn a safe policy under different safety constraints. We first consider different velocity models for green and red lights in the training process and use a finite state machine to handle different modes of light transformation. Then we design different types of distance constraints for vehicles, traffic lights, pedestrians, bicycles respectively and formulize the constrained optimal control problems (OCPs) to be optimized. Finally, reinforcement learning (RL) with value and policy networks is adopted to solve the series of OCPs. In order to verify the safety and efficiency of the proposed method, we design a multi-lane intersection with the existence of large-scale mixed traffic participants and set practical traffic light phases. The simulation results indicate that the trained decision and control policy can well balance safety and tracking performance. Compared with model predictive control (MPC), the computational time is three orders of magnitude lower.