 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Decision and Control for High-Level Automated Vehicles by Mixed Policy Gradient and Its Experiment Verification
Oct 19, 2022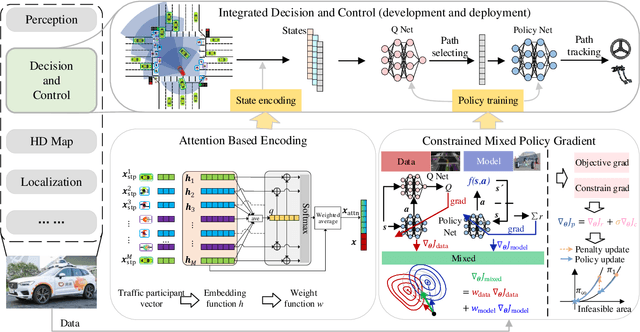
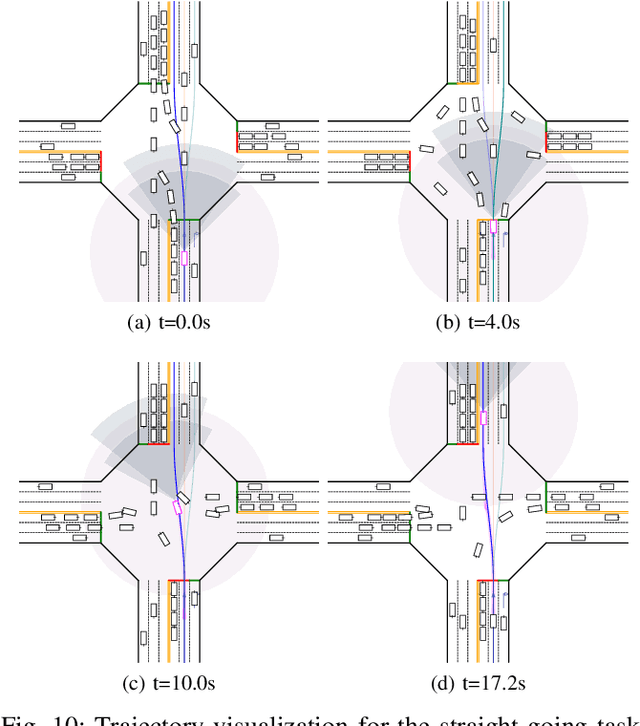
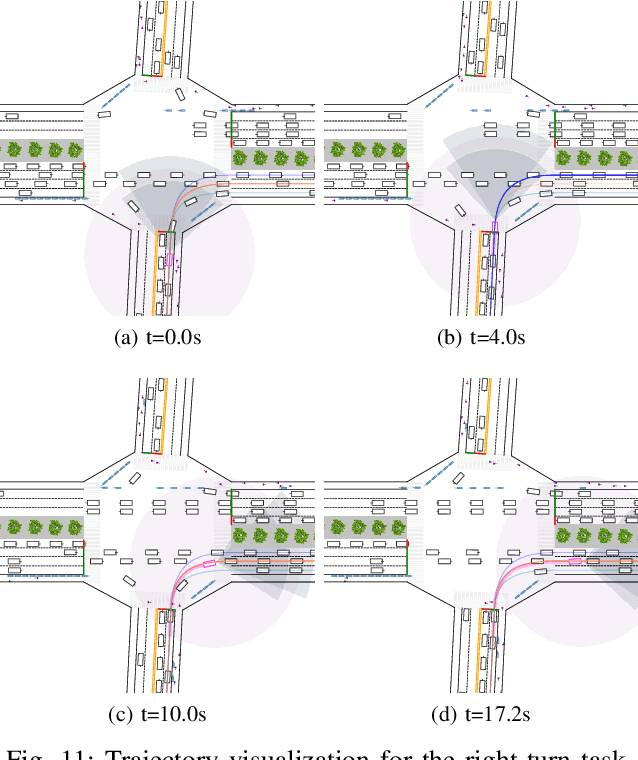
Self-evolution is indispensable to realize full autonomous driving. This paper presents a self-evolving decision-making system based on the Integrated Decision and Control (IDC), an advanced framework built on reinforcement learning (RL). First, an RL algorithm called constrained mixed policy gradient (CMPG) is proposed to consistently upgrade the driving policy of the IDC. It adapts the MPG under the penalty method so that it can solve constrained optimization problems using both the data and model. Second, an attention-based encoding (ABE) method is designed to tackle the state representation issue. It introduces an embedding network for feature extraction and a weighting network for feature fusion, fulfilling order-insensitive encoding and importance distinguishing of road users. Finally, by fusing CMPG and ABE, we develop the first data-driven decision and control system under the IDC architecture, and deploy the system on a fully-functional self-driving vehicle running in daily operation. Experiment results show that boosting by data, the system can achieve better driving ability over model-based methods. It also demonstrates safe, efficient and smart driving behavior in various complex scenes at a signalized intersection with real mixed traffic flow.
Improve Generalization of Driving Policy at Signalized Intersections with Adversarial Learning
Apr 09, 2022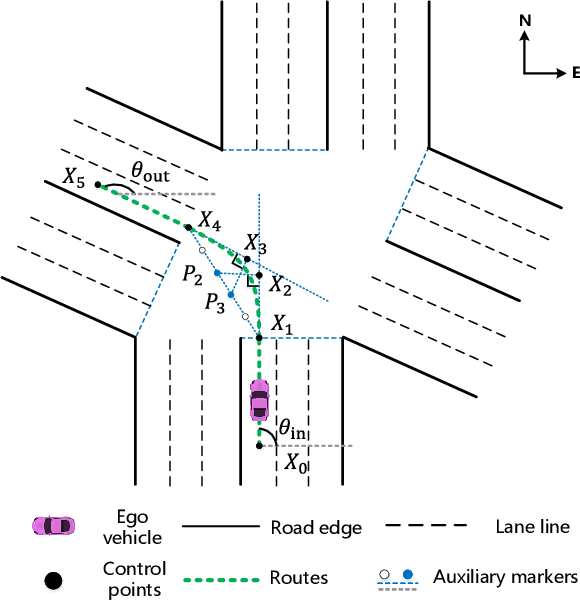
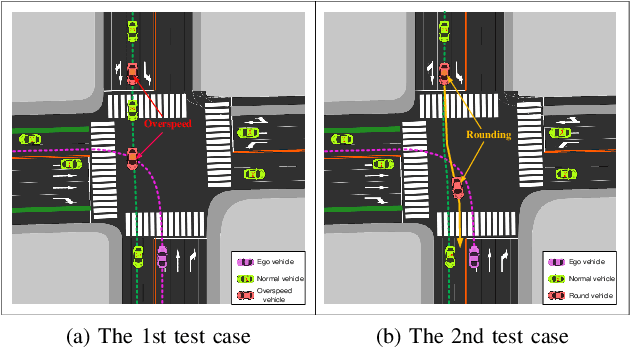
Intersections are quite challenging among various driving scenes wherein the interaction of signal lights and distinct traffic actors poses great difficulty to learn a wise and robust driving policy. Current research rarely considers the diversity of intersections and stochastic behaviors of traffic participants. For practical applications, the randomness usually leads to some devastating events, which should be the focus of autonomous driving. This paper introduces an adversarial learning paradigm to boost the intelligence and robustness of driving policy for signalized intersections with dense traffic flow. Firstly, we design a static path planner which is capable of generating trackable candidate paths for multiple intersections with diversified topology. Next, a constrained optimal control problem (COCP) is built based on these candidate paths wherein the bounded uncertainty of dynamic models is considered to capture the randomness of driving environment. We propose adversarial policy gradient (APG) to solve the COCP wherein the adversarial policy is introduced to provide disturbances by seeking the most severe uncertainty while the driving policy learns to handle this situation by competition. Finally, a comprehensive system is established to conduct training and testing wherein the perception module is introduced and the human experience is incorporated to solve the yellow light dilemma. Experiments indicate that the trained policy can handle the signal lights flexibly meanwhile realizing the smooth and efficient passing with a humanoid paradigm. Besides, APG enables a large-margin improvement of the resistance to the abnormal behaviors and thus ensures a high safety level for the autonomous vehicle.