 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBIGS: Bimanual Category-agnostic Interaction Reconstruction from Monocular Videos via 3D Gaussian Splatting
Apr 12, 2025Reconstructing 3Ds of hand-object interaction (HOI) is a fundamental problem that can find numerous applications. Despite recent advances, there is no comprehensive pipeline yet for bimanual class-agnostic interaction reconstruction from a monocular RGB video, where two hands and an unknown object are interacting with each other. Previous works tackled the limited hand-object interaction case, where object templates are pre-known or only one hand is involved in the interaction. The bimanual interaction reconstruction exhibits severe occlusions introduced by complex interactions between two hands and an object. To solve this, we first introduce BIGS (Bimanual Interaction 3D Gaussian Splatting), a method that reconstructs 3D Gaussians of hands and an unknown object from a monocular video. To robustly obtain object Gaussians avoiding severe occlusions, we leverage prior knowledge of pre-trained diffusion model with score distillation sampling (SDS) loss, to reconstruct unseen object parts. For hand Gaussians, we exploit the 3D priors of hand model (i.e., MANO) and share a single Gaussian for two hands to effectively accumulate hand 3D information, given limited views. To further consider the 3D alignment between hands and objects, we include the interacting-subjects optimization step during Gaussian optimization. Our method achieves the state-of-the-art accuracy on two challenging datasets, in terms of 3D hand pose estimation (MPJPE), 3D object reconstruction (CDh, CDo, F10), and rendering quality (PSNR, SSIM, LPIPS), respectively.
1st Place Solution to the 8th HANDS Workshop Challenge -- ARCTIC Track: 3DGS-based Bimanual Category-agnostic Interaction Reconstruction
Sep 28, 2024



This report describes our 1st place solution to the 8th HANDS workshop challenge (ARCTIC track) in conjunction with ECCV 2024. In this challenge, we address the task of bimanual category-agnostic hand-object interaction reconstruction, which aims to generate 3D reconstructions of both hands and the object from a monocular video, without relying on predefined templates. This task is particularly challenging due to the significant occlusion and dynamic contact between the hands and the object during bimanual manipulation. We worked to resolve these issues by introducing a mask loss and a 3D contact loss, respectively. Moreover, we applied 3D Gaussian Splatting (3DGS) to this task. As a result, our method achieved a value of 38.69 in the main metric, CD$_h$, on the ARCTIC test set.
Benchmarks and Challenges in Pose Estimation for Egocentric Hand Interactions with Objects
Mar 25, 2024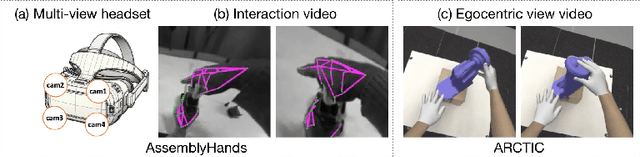
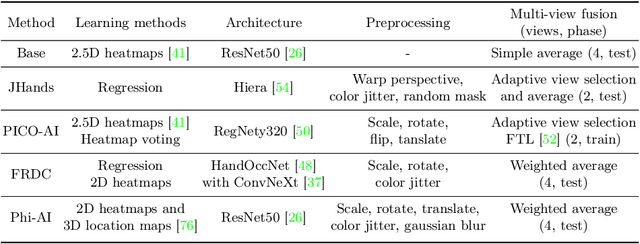
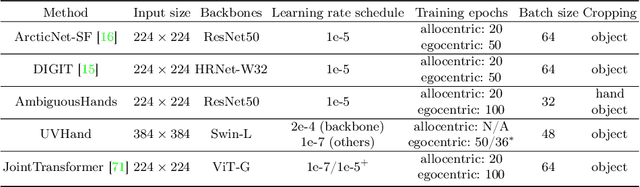
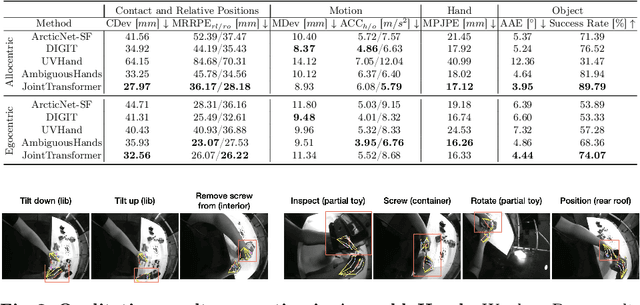
We interact with the world with our hands and see it through our own (egocentric) perspective. A holistic 3D understanding of such interactions from egocentric views is important for tasks in robotics, AR/VR, action recognition and motion generation. Accurately reconstructing such interactions in 3D is challenging due to heavy occlusion, viewpoint bias, camera distortion, and motion blur from the head movement. To this end, we designed the HANDS23 challenge based on the AssemblyHands and ARCTIC datasets with carefully designed training and testing splits. Based on the results of the top submitted methods and more recent baselines on the leaderboards, we perform a thorough analysis on 3D hand(-object) reconstruction tasks. Our analysis demonstrates the effectiveness of addressing distortion specific to egocentric cameras, adopting high-capacity transformers to learn complex hand-object interactions, and fusing predictions from different views. Our study further reveals challenging scenarios intractable with state-of-the-art methods, such as fast hand motion, object reconstruction from narrow egocentric views, and close contact between two hands and objects. Our efforts will enrich the community's knowledge foundation and facilitate future hand studies on egocentric hand-object interactions.
Class-Wise Buffer Management for Incremental Object Detection: An Effective Buffer Training Strategy
Dec 14, 2023



Class incremental learning aims to solve a problem that arises when continuously adding unseen class instances to an existing model This approach has been extensively studied in the context of image classification; however its applicability to object detection is not well established yet. Existing frameworks using replay methods mainly collect replay data without considering the model being trained and tend to rely on randomness or the number of labels of each sample. Also, despite the effectiveness of the replay, it was not yet optimized for the object detection task. In this paper, we introduce an effective buffer training strategy (eBTS) that creates the optimized replay buffer on object detection. Our approach incorporates guarantee minimum and hierarchical sampling to establish the buffer customized to the trained model. %These methods can facilitate effective retrieval of prior knowledge. Furthermore, we use the circular experience replay training to optimally utilize the accumulated buffer data. Experiments on the MS COCO dataset demonstrate that our eBTS achieves state-of-the-art performance compared to the existing replay schemes.