 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned IMU Bias Prediction for Invariant Visual Inertial Odometry
May 10, 2025Autonomous mobile robots operating in novel environments depend critically on accurate state estimation, often utilizing visual and inertial measurements. Recent work has shown that an invariant formulation of the extended Kalman filter improves the convergence and robustness of visual-inertial odometry by utilizing the Lie group structure of a robot's position, velocity, and orientation states. However, inertial sensors also require measurement bias estimation, yet introducing the bias in the filter state breaks the Lie group symmetry. In this paper, we design a neural network to predict the bias of an inertial measurement unit (IMU) from a sequence of previous IMU measurements. This allows us to use an invariant filter for visual inertial odometry, relying on the learned bias prediction rather than introducing the bias in the filter state. We demonstrate that an invariant multi-state constraint Kalman filter (MSCKF) with learned bias predictions achieves robust visual-inertial odometry in real experiments, even when visual information is unavailable for extended periods and the system needs to rely solely on IMU measurements.
LLMs for Literature Review: Are we there yet?
Dec 15, 2024



Literature reviews are an essential component of scientific research, but they remain time-intensive and challenging to write, especially due to the recent influx of research papers. This paper explores the zero-shot abilities of recent Large Language Models (LLMs) in assisting with the writing of literature reviews based on an abstract. We decompose the task into two components: 1. Retrieving related works given a query abstract, and 2. Writing a literature review based on the retrieved results. We analyze how effective LLMs are for both components. For retrieval, we introduce a novel two-step search strategy that first uses an LLM to extract meaningful keywords from the abstract of a paper and then retrieves potentially relevant papers by querying an external knowledge base. Additionally, we study a prompting-based re-ranking mechanism with attribution and show that re-ranking doubles the normalized recall compared to naive search methods, while providing insights into the LLM's decision-making process. In the generation phase, we propose a two-step approach that first outlines a plan for the review and then executes steps in the plan to generate the actual review. To evaluate different LLM-based literature review methods, we create test sets from arXiv papers using a protocol designed for rolling use with newly released LLMs to avoid test set contamination in zero-shot evaluations. We release this evaluation protocol to promote additional research and development in this regard. Our empirical results suggest that LLMs show promising potential for writing literature reviews when the task is decomposed into smaller components of retrieval and planning. Further, we demonstrate that our planning-based approach achieves higher-quality reviews by minimizing hallucinated references in the generated review by 18-26% compared to existing simpler LLM-based generation methods.
Port-Hamiltonian Neural ODE Networks on Lie Groups For Robot Dynamics Learning and Control
Jan 17, 2024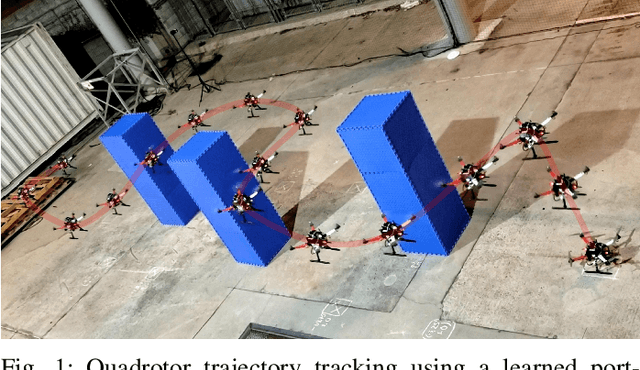
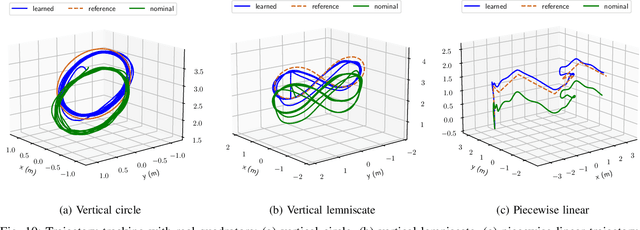
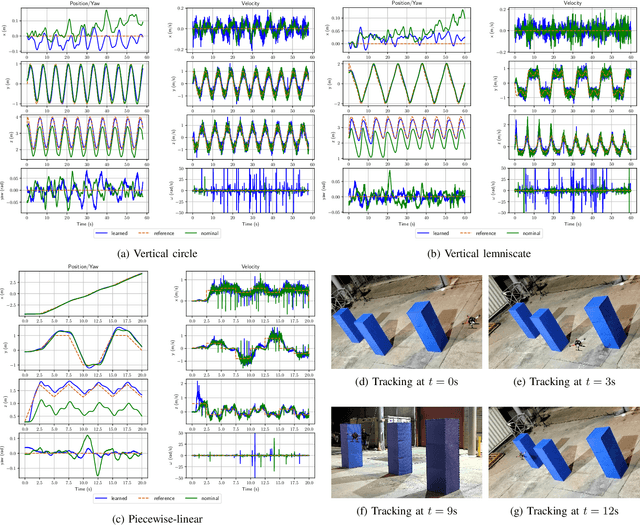
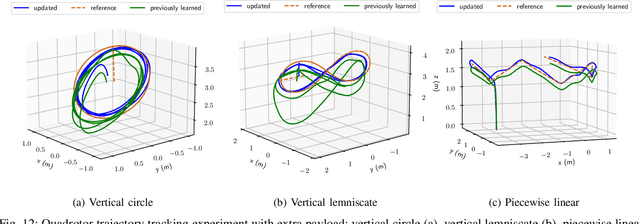
Accurate models of robot dynamics are critical for safe and stable control and generalization to novel operational conditions. Hand-designed models, however, may be insufficiently accurate, even after careful parameter tuning. This motivates the use of machine learning techniques to approximate the robot dynamics over a training set of state-control trajectories. The dynamics of many robots are described in terms of their generalized coordinates on a matrix Lie group, e.g. on SE(3) for ground, aerial, and underwater vehicles, and generalized velocity, and satisfy conservation of energy principles. This paper proposes a (port-)Hamiltonian formulation over a Lie group of the structure of a neural ordinary differential equation (ODE) network to approximate the robot dynamics. In contrast to a black-box ODE network, our formulation guarantees energy conservation principle and Lie group's constraints by construction and explicitly accounts for energy-dissipation effect such as friction and drag forces in the dynamics model. We develop energy shaping and damping injection control for the learned, potentially under-actuated Hamiltonian dynamics to enable a unified approach for stabilization and trajectory tracking with various robot platforms.
Hamiltonian Dynamics Learning from Point Cloud Observations for Nonholonomic Mobile Robot Control
Sep 17, 2023Reliable autonomous navigation requires adapting the control policy of a mobile robot in response to dynamics changes in different operational conditions. Hand-designed dynamics models may struggle to capture model variations due to a limited set of parameters. Data-driven dynamics learning approaches offer higher model capacity and better generalization but require large amounts of state-labeled data. This paper develops an approach for learning robot dynamics directly from point-cloud observations, removing the need and associated errors of state estimation, while embedding Hamiltonian structure in the dynamics model to improve data efficiency. We design an observation-space loss that relates motion prediction from the dynamics model with motion prediction from point-cloud registration to train a Hamiltonian neural ordinary differential equation. The learned Hamiltonian model enables the design of an energy-shaping model-based tracking controller for rigid-body robots. We demonstrate dynamics learning and tracking control on a real nonholonomic wheeled robot.
Uncertainty as a Form of Transparency: Measuring, Communicating, and Using Uncertainty
Nov 15, 2020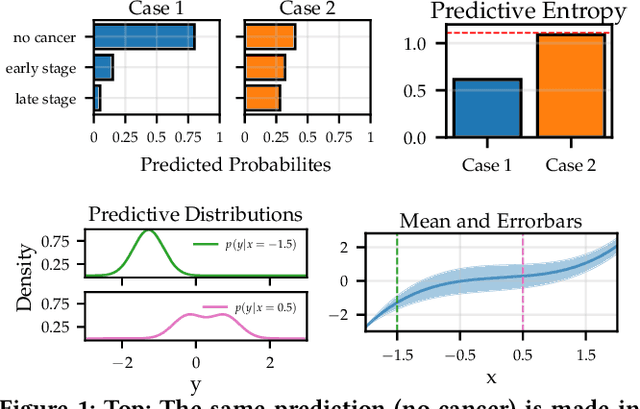
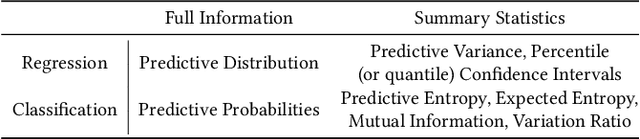
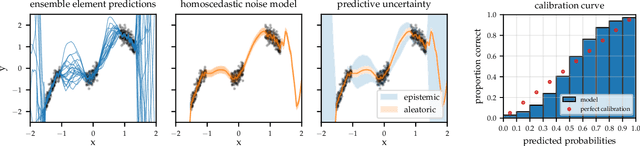
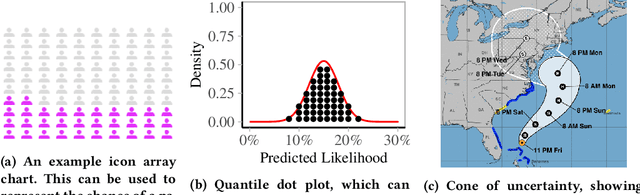
Transparency of algorithmic systems entails exposing system properties to various stakeholders for purposes that include understanding, improving, and/or contesting predictions. The machine learning (ML) community has mostly considered explainability as a proxy for transparency. With this work, we seek to encourage researchers to study uncertainty as a form of transparency and practitioners to communicate uncertainty estimates to stakeholders. First, we discuss methods for assessing uncertainty. Then, we describe the utility of uncertainty for mitigating model unfairness, augmenting decision-making, and building trustworthy systems. We also review methods for displaying uncertainty to stakeholders and discuss how to collect information required for incorporating uncertainty into existing ML pipelines. Our contribution is an interdisciplinary review to inform how to measure, communicate, and use uncertainty as a form of transparency.
Active Diagnosis via AUC Maximization: An Efficient Approach for Multiple Fault Identification in Large Scale, Noisy Networks
Feb 14, 2012

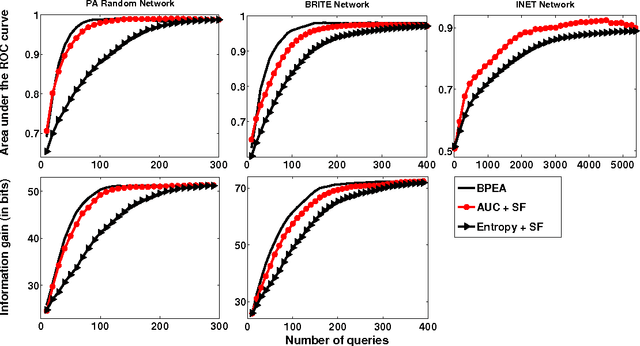
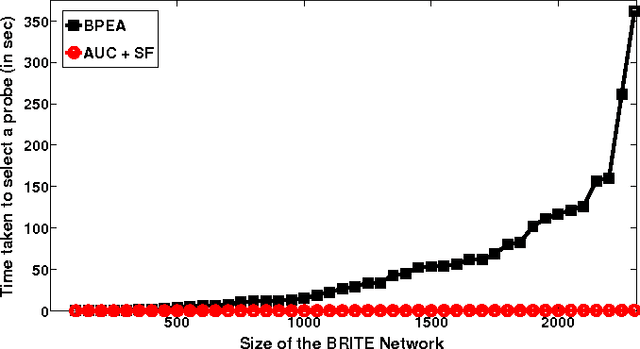
The problem of active diagnosis arises in several applications such as disease diagnosis, and fault diagnosis in computer networks, where the goal is to rapidly identify the binary states of a set of objects (e.g., faulty or working) by sequentially selecting, and observing, (noisy) responses to binary valued queries. Current algorithms in this area rely on loopy belief propagation for active query selection. These algorithms have an exponential time complexity, making them slow and even intractable in large networks. We propose a rank-based greedy algorithm that sequentially chooses queries such that the area under the ROC curve of the rank-based output is maximized. The AUC criterion allows us to make a simplifying assumption that significantly reduces the complexity of active query selection (from exponential to near quadratic), with little or no compromise on the performance quality.