 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Nonlinear Factor Models with Unknown Monotone Links from Incomplete and Noisy Data
May 25, 2026We study a nonlinear factor model in which observed responses depend on low-rank latent factors through an unknown monotone link function. This setting is challenging and largely underexplored due to severe nonconvexity and identifiability issues. The link function is assumed to lie in a reproducing kernel Hilbert space (RKHS), enabling flexible nonparametric modeling while preserving identifiability. We formulate the problem as the joint recovery of the low-rank factors, loadings, and the nonlinear link function from possibly incomplete and noisy observations and propose a projected block coordinate descent (BCD) algorithm with explicit regularization to address scale and rotational ambiguities. Under mild incoherence of factors and standard sampling conditions, we establish convergence guarantees in both noiseless and noisy regimes, along with sublinear regret bounds for the link-function updates. Our results extend classical linear factor models to a broad nonlinear regime and provide a principled framework for learning nonlinear latent structures. We evaluate the proposed approach using controlled synthetic experiments, indicating promising performance.
Active Context Selection Improves Simple Regret in Contextual Bandits
May 19, 2026We study the contextual multi-armed bandit problem with a finite context space (a.k.a. subpopulations), where the learner recommends a best action for each context and is evaluated by context-weighted simple regret. Our guarantees are worst-case over the reward distributions, while remaining instance-dependent with respect to the context distribution vector $p$. Akin to experimental design problems where the population of interest is fixed but the sampled subpopulation can be controlled, we allow the learner to actively choose which context to sample from. For a known $p$, we characterize tight regret rates: passive sampling where contexts are randomly revealed achieves regret of order $\sqrt{n/T \, \lVert p \rVert_{1/2}}$, whereas active sampling with allocation $q_j \propto p_j^{2/3}$ achieves the tight rate $\sqrt{n/T} \, \lVert p \rVert_{2/3}$. The resulting improvement can be as large as $Θ(k^{1/4})$, where $k$ is the number of contexts. We further extend the analysis to budgeted active sampling, characterize the corresponding tight rate, and identify when a limited active budget suffices to recover the fully active rate. When $p$ is unknown, we propose the Explore-Explore-Then-Commit (EETC) algorithm, which optimally balances estimating the context distribution and the time to switch to active allocation, such that for large horizons, it matches the known-$p$ active rate up to constants. Experiments on synthetic and real-world data support our theoretical findings.
Convergence of Consensus-Based Particle Methods for Nonconvex Bi-Level Optimization
May 19, 2026In this paper, we study a consensus-based optimization method for nonconvex bi-level optimization, where the objective is to minimize an upper-level function over the set of global minimizers of a lower-level problem. The proposed approach is derivative-free, and constructs its consensus point via smooth quantile selection combined with a Gibbs-type Laplace approximation. We establish convergence guarantees for both the associated \textit{mean-field} dynamics and its \textit{finite-particle} approximation. In particular, under suitable assumptions on smooth quantile localization, error bounds, and stability, we show that the mean-field law reaches any arbitrary prescribed Wasserstein neighborhood of the target bi-level solution with an explicit exponential rate up to the hitting time. Numerical experiments on a two-dimensional constrained problem and neural network training further support the theoretical results.
Consensus-based optimization (CBO): Towards Global Optimality in Robotics
Feb 06, 2026Zero-order optimization has recently received significant attention for designing optimal trajectories and policies for robotic systems. However, most existing methods (e.g., MPPI, CEM, and CMA-ES) are local in nature, as they rely on gradient estimation. In this paper, we introduce consensus-based optimization (CBO) to robotics, which is guaranteed to converge to a global optimum under mild assumptions. We provide theoretical analysis and illustrative examples that give intuition into the fundamental differences between CBO and existing methods. To demonstrate the scalability of CBO for robotics problems, we consider three challenging trajectory optimization scenarios: (1) a long-horizon problem for a simple system, (2) a dynamic balance problem for a highly underactuated system, and (3) a high-dimensional problem with only a terminal cost. Our results show that CBO is able to achieve lower costs with respect to existing methods on all three challenging settings. This opens a new framework to study global trajectory optimization in robotics.
Recycling History: Efficient Recommendations from Contextual Dueling Bandits
Aug 26, 2025The contextual duelling bandit problem models adaptive recommender systems, where the algorithm presents a set of items to the user, and the user's choice reveals their preference. This setup is well suited for implicit choices users make when navigating a content platform, but does not capture other possible comparison queries. Motivated by the fact that users provide more reliable feedback after consuming items, we propose a new bandit model that can be described as follows. The algorithm recommends one item per time step; after consuming that item, the user is asked to compare it with another item chosen from the user's consumption history. Importantly, in our model, this comparison item can be chosen without incurring any additional regret, potentially leading to better performance. However, the regret analysis is challenging because of the temporal dependency in the user's history. To overcome this challenge, we first show that the algorithm can construct informative queries provided the history is rich, i.e., satisfies a certain diversity condition. We then show that a short initial random exploration phase is sufficient for the algorithm to accumulate a rich history with high probability. This result, proven via matrix concentration bounds, yields $O(\sqrt{T})$ regret guarantees. Additionally, our simulations show that reusing past items for comparisons can lead to significantly lower regret than only comparing between simultaneously recommended items.
Recommendations from Sparse Comparison Data: Provably Fast Convergence for Nonconvex Matrix Factorization
Feb 27, 2025
This paper provides a theoretical analysis of a new learning problem for recommender systems where users provide feedback by comparing pairs of items instead of rating them individually. We assume that comparisons stem from latent user and item features, which reduces the task of predicting preferences to learning these features from comparison data. Similar to the classical matrix factorization problem, the main challenge in this learning task is that the resulting loss function is nonconvex. Our analysis shows that the loss function exhibits (restricted) strong convexity near the true solution, which ensures gradient-based methods converge exponentially, given an appropriate warm start. Importantly, this result holds in a sparse data regime, where each user compares only a few pairs of items. Our main technical contribution is to extend certain concentration inequalities commonly used in matrix completion to our model. Our work demonstrates that learning personalized recommendations from comparison data is computationally and statistically efficient.
Riemannian Manifold Learning for Stackelberg Games with Neural Flow Representations
Feb 08, 2025


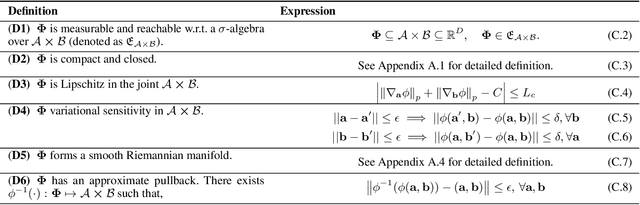
We present a novel framework for online learning in Stackelberg general-sum games, where two agents, the leader and follower, engage in sequential turn-based interactions. At the core of this approach is a learned diffeomorphism that maps the joint action space to a smooth Riemannian manifold, referred to as the Stackelberg manifold. This mapping, facilitated by neural normalizing flows, ensures the formation of tractable isoplanar subspaces, enabling efficient techniques for online learning. By assuming linearity between the agents' reward functions on the Stackelberg manifold, our construct allows the application of standard bandit algorithms. We then provide a rigorous theoretical basis for regret minimization on convex manifolds and establish finite-time bounds on simple regret for learning Stackelberg equilibria. This integration of manifold learning into game theory uncovers a previously unrecognized potential for neural normalizing flows as an effective tool for multi-agent learning. We present empirical results demonstrating the effectiveness of our approach compared to standard baselines, with applications spanning domains such as cybersecurity and economic supply chain optimization.
Fast Proxy Experiment Design for Causal Effect Identification
Jul 07, 2024Identifying causal effects is a key problem of interest across many disciplines. The two long-standing approaches to estimate causal effects are observational and experimental (randomized) studies. Observational studies can suffer from unmeasured confounding, which may render the causal effects unidentifiable. On the other hand, direct experiments on the target variable may be too costly or even infeasible to conduct. A middle ground between these two approaches is to estimate the causal effect of interest through proxy experiments, which are conducted on variables with a lower cost to intervene on compared to the main target. Akbari et al. [2022] studied this setting and demonstrated that the problem of designing the optimal (minimum-cost) experiment for causal effect identification is NP-complete and provided a naive algorithm that may require solving exponentially many NP-hard problems as a sub-routine in the worst case. In this work, we provide a few reformulations of the problem that allow for designing significantly more efficient algorithms to solve it as witnessed by our extensive simulations. Additionally, we study the closely-related problem of designing experiments that enable us to identify a given effect through valid adjustments sets.
Parameter identification in linear non-Gaussian causal models under general confounding
May 31, 2024



Linear non-Gaussian causal models postulate that each random variable is a linear function of parent variables and non-Gaussian exogenous error terms. We study identification of the linear coefficients when such models contain latent variables. Our focus is on the commonly studied acyclic setting, where each model corresponds to a directed acyclic graph (DAG). For this case, prior literature has demonstrated that connections to overcomplete independent component analysis yield effective criteria to decide parameter identifiability in latent variable models. However, this connection is based on the assumption that the observed variables linearly depend on the latent variables. Departing from this assumption, we treat models that allow for arbitrary non-linear latent confounding. Our main result is a graphical criterion that is necessary and sufficient for deciding the generic identifiability of direct causal effects. Moreover, we provide an algorithmic implementation of the criterion with a run time that is polynomial in the number of observed variables. Finally, we report on estimation heuristics based on the identification result, explore a generalization to models with feedback loops, and provide new results on the identifiability of the causal graph.
Confounded Budgeted Causal Bandits
Jan 15, 2024



We study the problem of learning 'good' interventions in a stochastic environment modeled by its underlying causal graph. Good interventions refer to interventions that maximize rewards. Specifically, we consider the setting of a pre-specified budget constraint, where interventions can have non-uniform costs. We show that this problem can be formulated as maximizing the expected reward for a stochastic multi-armed bandit with side information. We propose an algorithm to minimize the cumulative regret in general causal graphs. This algorithm trades off observations and interventions based on their costs to achieve the optimal reward. This algorithm generalizes the state-of-the-art methods by allowing non-uniform costs and hidden confounders in the causal graph. Furthermore, we develop an algorithm to minimize the simple regret in the budgeted setting with non-uniform costs and also general causal graphs. We provide theoretical guarantees, including both upper and lower bounds, as well as empirical evaluations of our algorithms. Our empirical results showcase that our algorithms outperform the state of the art.