 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHOT3D: Hand and Object Tracking in 3D from Egocentric Multi-View Videos
Nov 28, 2024We introduce HOT3D, a publicly available dataset for egocentric hand and object tracking in 3D. The dataset offers over 833 minutes (more than 3.7M images) of multi-view RGB/monochrome image streams showing 19 subjects interacting with 33 diverse rigid objects, multi-modal signals such as eye gaze or scene point clouds, as well as comprehensive ground-truth annotations including 3D poses of objects, hands, and cameras, and 3D models of hands and objects. In addition to simple pick-up/observe/put-down actions, HOT3D contains scenarios resembling typical actions in a kitchen, office, and living room environment. The dataset is recorded by two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. Ground-truth poses were obtained by a professional motion-capture system using small optical markers attached to hands and objects. Hand annotations are provided in the UmeTrack and MANO formats and objects are represented by 3D meshes with PBR materials obtained by an in-house scanner. In our experiments, we demonstrate the effectiveness of multi-view egocentric data for three popular tasks: 3D hand tracking, 6DoF object pose estimation, and 3D lifting of unknown in-hand objects. The evaluated multi-view methods, whose benchmarking is uniquely enabled by HOT3D, significantly outperform their single-view counterparts.
Introducing HOT3D: An Egocentric Dataset for 3D Hand and Object Tracking
Jun 13, 2024We introduce HOT3D, a publicly available dataset for egocentric hand and object tracking in 3D. The dataset offers over 833 minutes (more than 3.7M images) of multi-view RGB/monochrome image streams showing 19 subjects interacting with 33 diverse rigid objects, multi-modal signals such as eye gaze or scene point clouds, as well as comprehensive ground truth annotations including 3D poses of objects, hands, and cameras, and 3D models of hands and objects. In addition to simple pick-up/observe/put-down actions, HOT3D contains scenarios resembling typical actions in a kitchen, office, and living room environment. The dataset is recorded by two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. Ground-truth poses were obtained by a professional motion-capture system using small optical markers attached to hands and objects. Hand annotations are provided in the UmeTrack and MANO formats and objects are represented by 3D meshes with PBR materials obtained by an in-house scanner. We aim to accelerate research on egocentric hand-object interaction by making the HOT3D dataset publicly available and by co-organizing public challenges on the dataset at ECCV 2024. The dataset can be downloaded from the project website: https://facebookresearch.github.io/hot3d/.
Aria Everyday Activities Dataset
Feb 22, 2024



We present Aria Everyday Activities (AEA) Dataset, an egocentric multimodal open dataset recorded using Project Aria glasses. AEA contains 143 daily activity sequences recorded by multiple wearers in five geographically diverse indoor locations. Each of the recording contains multimodal sensor data recorded through the Project Aria glasses. In addition, AEA provides machine perception data including high frequency globally aligned 3D trajectories, scene point cloud, per-frame 3D eye gaze vector and time aligned speech transcription. In this paper, we demonstrate a few exemplar research applications enabled by this dataset, including neural scene reconstruction and prompted segmentation. AEA is an open source dataset that can be downloaded from https://www.projectaria.com/datasets/aea/. We are also providing open-source implementations and examples of how to use the dataset in Project Aria Tools https://github.com/facebookresearch/projectaria_tools.
Robust Indoor Localization with Ranging-IMU Fusion
Sep 15, 2023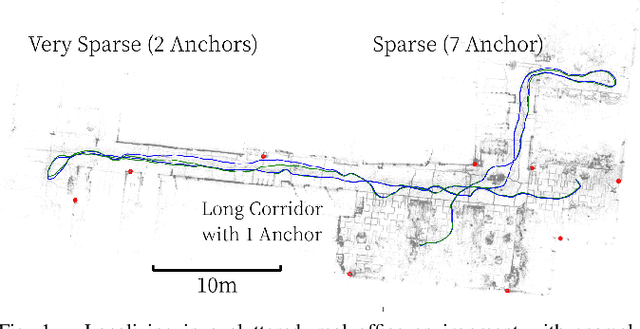
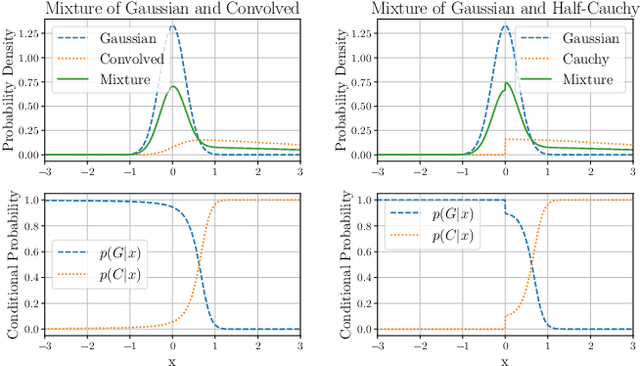
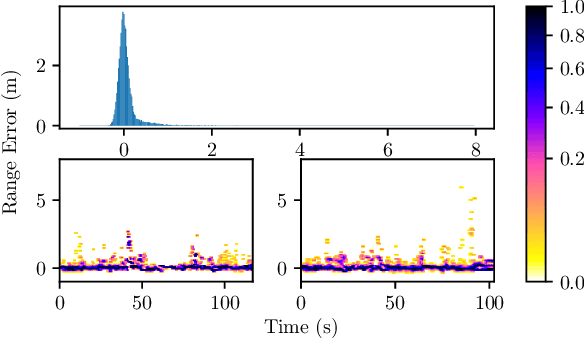
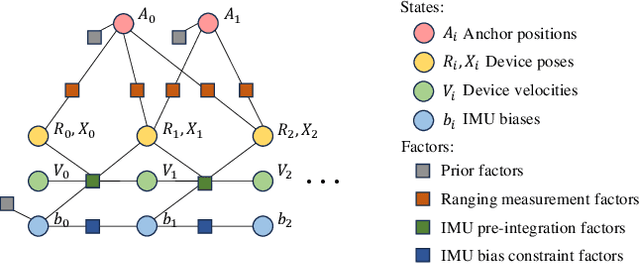
Indoor wireless ranging localization is a promising approach for low-power and high-accuracy localization of wearable devices. A primary challenge in this domain stems from non-line of sight propagation of radio waves. This study tackles a fundamental issue in wireless ranging: the unpredictability of real-time multipath determination, especially in challenging conditions such as when there is no direct line of sight. We achieve this by fusing range measurements with inertial measurements obtained from a low cost Inertial Measurement Unit (IMU). For this purpose, we introduce a novel asymmetric noise model crafted specifically for non-Gaussian multipath disturbances. Additionally, we present a novel Levenberg-Marquardt (LM)-family trust-region adaptation of the iSAM2 fusion algorithm, which is optimized for robust performance for our ranging-IMU fusion problem. We evaluate our solution in a densely occupied real office environment. Our proposed solution can achieve temporally consistent localization with an average absolute accuracy of $\sim$0.3m in real-world settings. Furthermore, our results indicate that we can achieve comparable accuracy even with infrequent (1Hz) range measurements.
Project Aria: A New Tool for Egocentric Multi-Modal AI Research
Sep 12, 2023



Egocentric, multi-modal data as available on future augmented reality (AR) devices provides unique challenges and opportunities for machine perception. These future devices will need to be all-day wearable in a socially acceptable form-factor to support always available, context-aware and personalized AI applications. Our team at Meta Reality Labs Research built the Aria device, an egocentric, multi-modal data recording and streaming device with the goal to foster and accelerate research in this area. In this paper, we describe the Aria device hardware including its sensor configuration and the corresponding software tools that enable recording and processing of such data.