 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDOA Estimation for Low-Altitude Networks: HAD Architectures, Methods, and Challenges
Apr 01, 2026With the rapid expansion of low-altitude economy (LAE) services and the growing demand for integrated sensing and communication (ISAC) in air-ground networks, reliable direction-of-arrival (DOA) estimation has become essential for both directional communication and sensing functions. DOA underpins beam alignment, spatial-reuse scheduling, and ISAC-critical tasks such as airspace situational awareness and multi-target monitoring. Hybrid analog-digital (HAD) architectures have emerged as a practical solution for large-aperture directional operation under stringent radio frequency (RF), analog-to-digital converter (ADC), and size, weight, and power (SWaP) constraints. However, HAD compresses antenna-domain observations through analog combining, fundamentally reshaping the measurement model and introducing new algorithmic and system-level challenges for DOA estimation. This article first reviews the principles and representative architectures of HAD, highlighting their advantages for scalable beam-centric and ISAC-oriented operation in LAE scenarios. We then provide a structured overview of HAD-enabled DOA estimation methodologies, including spatial covariance matrix (SCM) reconstruction, multi-combiner scan-based acquisition, and pilot-aided estimation, along with key design tradeoffs. Finally, we discuss open challenges and outline reliability-driven research directions toward robust, deployable HAD-enabled DOA solutions for practical ISAC-enabled low-altitude environments.
From Partial Calibration to Full Potential: A Two-Stage Sparse DOA Estimation for Incoherently-Distributed Sources with Gain-Phase Uncertainty
Jan 28, 2025

Direction-of-arrival (DOA) estimation for incoherently distributed (ID) sources is essential in multipath wireless communication scenarios, yet it remains challenging due to the combined effects of angular spread and gain-phase uncertainties in antenna arrays. This paper presents a two-stage sparse DOA estimation framework, transitioning from partial calibration to full potential, under the generalized array manifold (GAM) framework. In the first stage, coarse DOA estimates are obtained by exploiting the output from a subset of partly-calibrated arrays (PCAs). In the second stage, these estimates are utilized to determine and compensate for gain-phase uncertainties across all array elements. Then a sparse total least-squares optimization problem is formulated and solved via alternating descent to refine the DOA estimates. Simulation results demonstrate that the proposed method attained improved estimation accuracy compared to existing approaches, while maintaining robustness against both noise and angular spread effects in practical multipath environments.
Improved ICNN-LSTM Model Classification Based on Attitude Sensor Data for Hazardous State Assessment of Magnetic Adhesion Climbing Wall Robots
Dec 30, 2024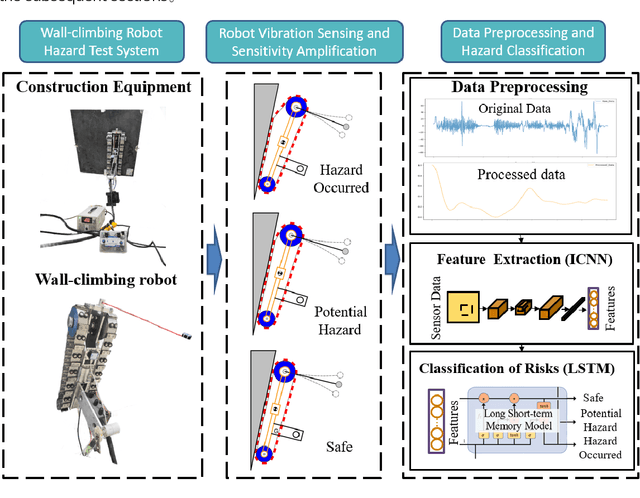
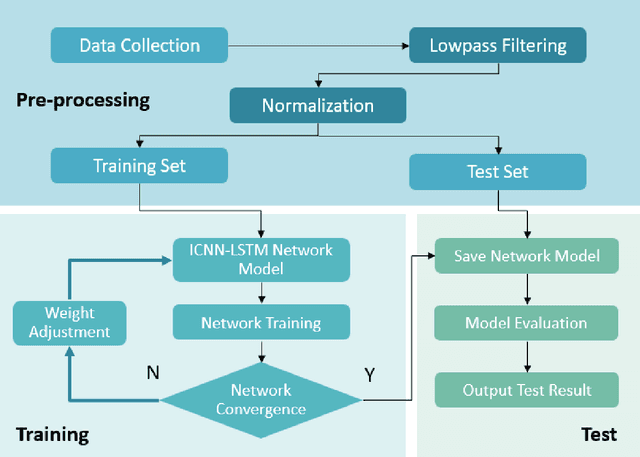
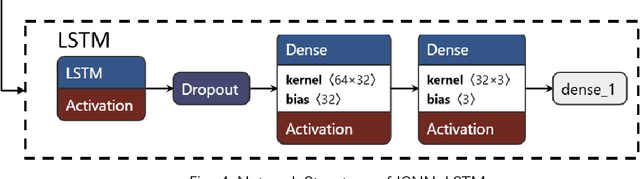
Magnetic adhesion tracked climbing robots are widely utilized in high-altitude inspection, welding, and cleaning tasks due to their ability to perform various operations against gravity on vertical or inclined walls. However, during operation, the robot may experience overturning torque caused by its own weight and load, which can lead to the detachment of magnetic plates and subsequently pose safety risks. This paper proposes an improved ICNN-LSTM network classification method based on Micro-Electro-Mechanical Systems (MEMS) attitude sensor data for real-time monitoring and assessment of hazardous states in magnetic adhesion tracked climbing robots. Firstly, a data acquisition strategy for attitude sensors capable of capturing minute vibrations is designed. Secondly, a feature extraction and classification model combining an Improved Convolutional Neural Network (ICNN) with a Long Short-Term Memory (LSTM) network is proposed. Experimental validation demonstrates that the proposed minute vibration sensing method achieves significant results, and the proposed classification model consistently exhibits high accuracy compared to other models. The research findings provide effective technical support for the safe operation of climbing robots
Biomimetic Evaluation of an Underwater Soft Hand Through Deep Learning-based 3D Pose Reconstruction
Mar 16, 2022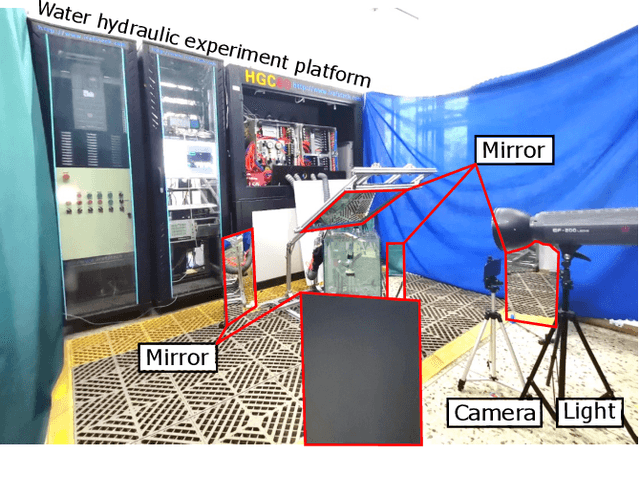
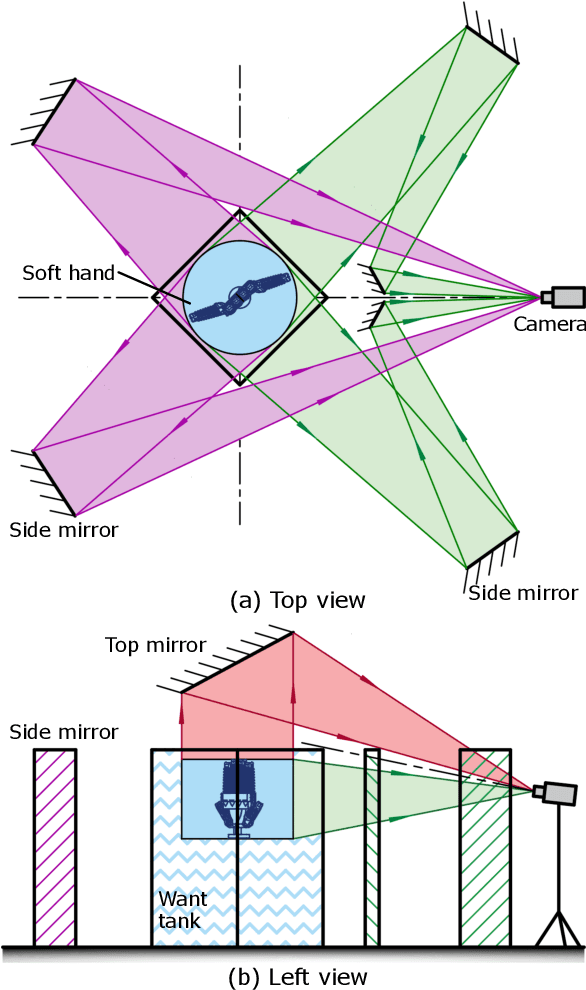
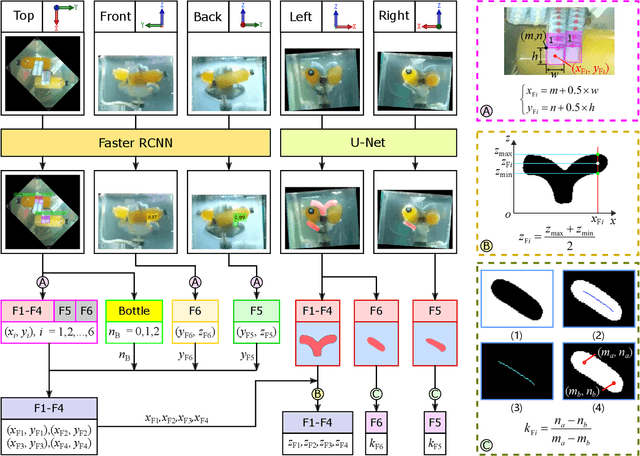

Soft robotic hand shows considerable promise for various grasping applications. However, the sensing and reconstruction of the robot pose will cause limitation during the design and fabrication. In this work, we present a novel 3D pose reconstruction approach to analyze the grasping motion of a bidirectional soft robotic hand using experiment videos. The images from top, front, back, left, right view were collected using an one-camera-multiple-mirror imaging device. The coordinate and orientation information of soft fingers are detected based on deep learning methods. Faster RCNN model is used to detect the position of fingertips, while U-Net model is applied to calculate the side boundary of the fingers. Based on the kinematics, the corresponding coordinate and orientation databases are established. The 3D pose reconstructed result presents a satisfactory performance and good accuracy. Using efficacy coefficient method, the finger contribution of the bending angle and distance between fingers of soft robot hand is analyzed by compared with that of human hand. The results show that the soft robot hand perform a human-like motion in both single-direction and bidirectional grasping.
Underwater Soft Robotic Hand with Multi-Source Coupling Bio-Inspired Soft Palm and Six Fingers Driven by Water Hydraulic
Jun 13, 2021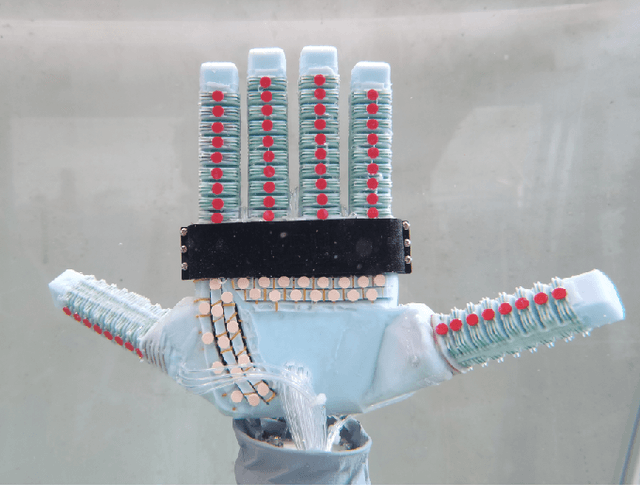
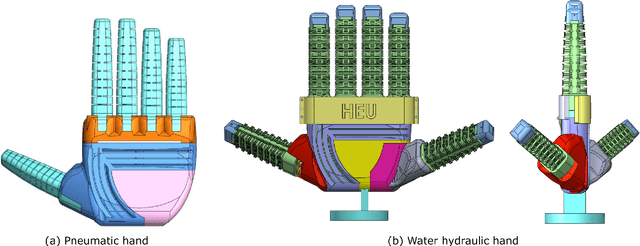
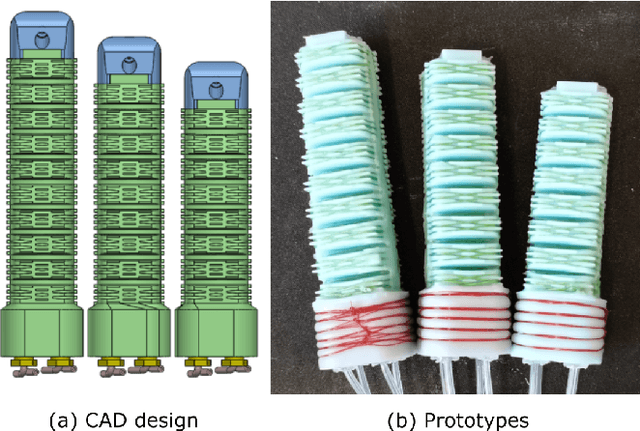
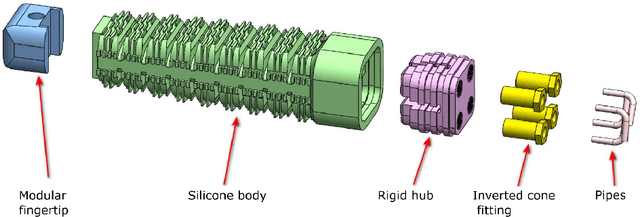
A new fluid-driven soft robot hand in this study uses the idea of the bionics and has the anthropomorphic form, which is oriented to the flexible grasp function. The soft robot hand is composed of a new kind of multi-freedom soft finger and soft palm, which realizes the characteristic grasping function of forehand and backhand. Combined with the fine fluid control system, the soft hand can realize flexible grasping under high pressure, so as to realize flexible grasping operation for different types of target objects in the underwater environment. The soft robot hand was controlled based on water hydraulic platform, Finally, the soft robot hand and the fine fluid control system were connected to form the underwater soft robot hand experiment platform.
A Novel Design of Soft Robotic Hand with a Human-inspired Soft Palm for Dexterous Grasping
Sep 02, 2020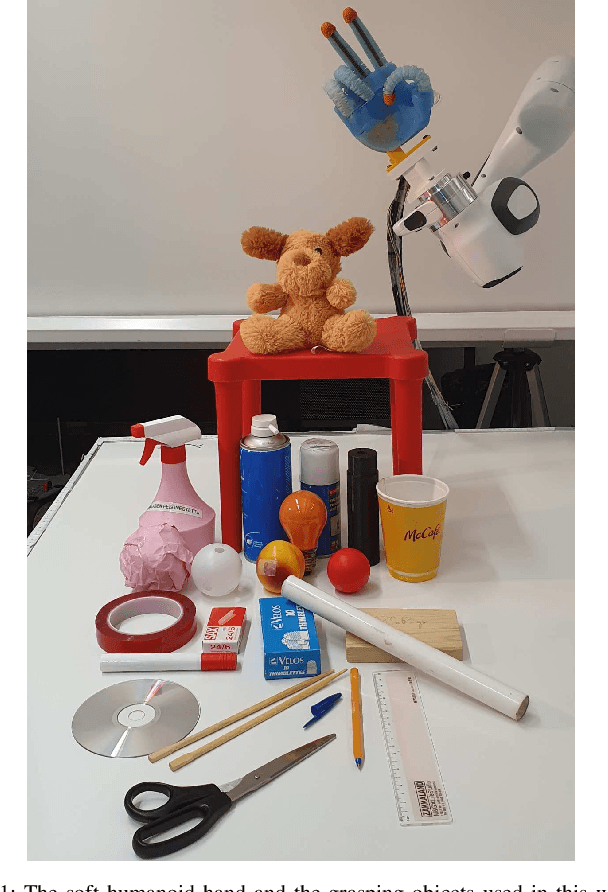
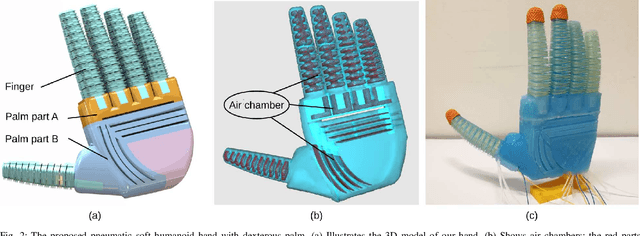
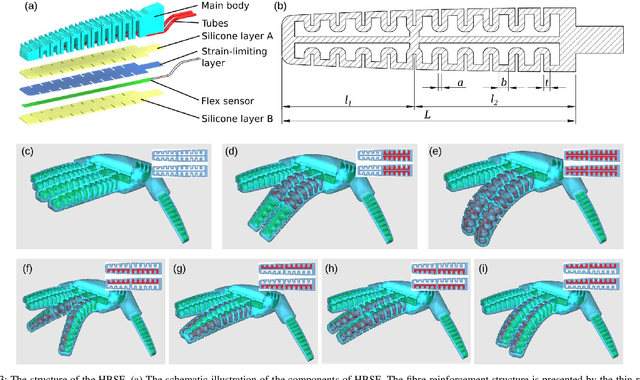
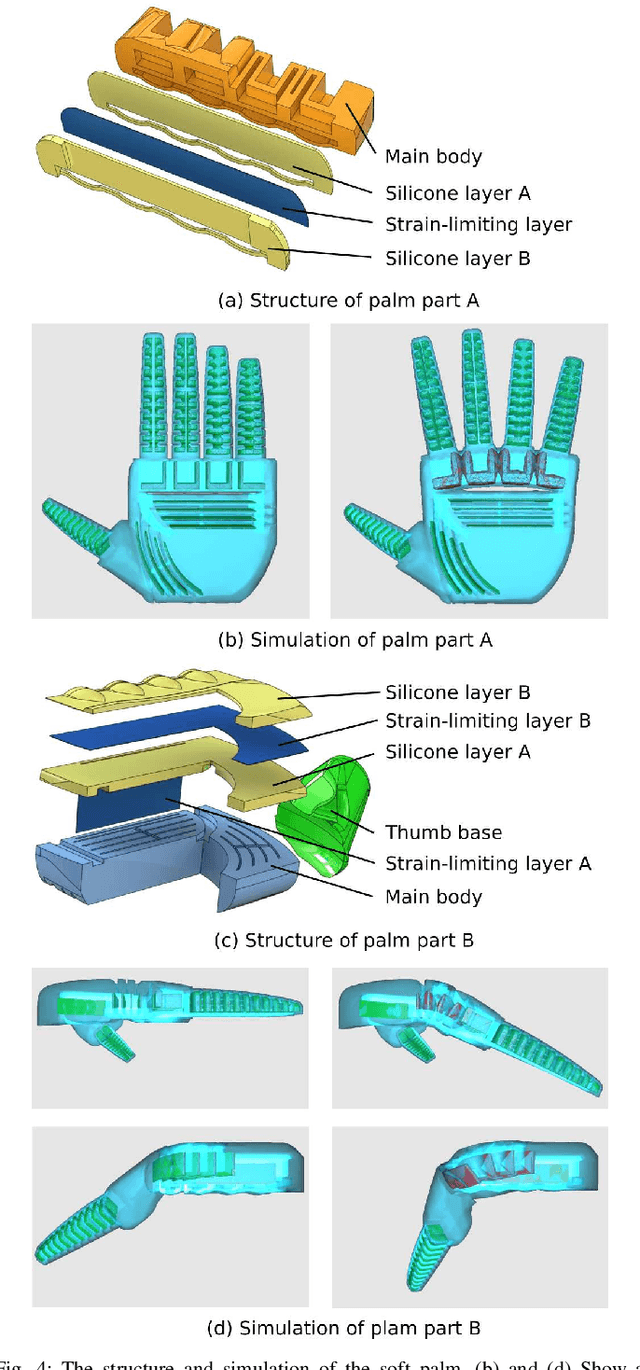
Soft robotic hands and grippers are increasingly attracting attention as a robotic end-effector. Compared with rigid counterparts, they are safer for human-robot and environment-robot interactions, easier to control, lower cost and weight, and more compliant. Current soft robotic hands have mostly focused on the soft fingers and bending actuators. However, the palm is also essential part for grasping. In this work, we propose a novel design of soft humanoid hand with pneumatic soft fingers and soft palm. The hand is inexpensive to fabricate. The configuration of the soft palm is based on modular design which can be easily applied into actuating all kinds of soft fingers before. The splaying of the fingers, bending of the whole palm, abduction and adduction of the thumb are implemented by the soft palm. Moreover, we present a new design of soft finger, called hybrid bending soft finger (HBSF). It can both bend in the grasping axis and deflect in the side-to-side axis as human-like motion. The functions of the HBSF and soft palm were simulated by SOFA framework. And their performance was tested in experiments. The 6 fingers with 1 to 11 segments were tested and analyzed. The versatility of the soft hand is evaluated and testified by the grasping experiments in real scenario according to Feix taxonomy. And the results present the diversity of grasps and show promise for grasping a variety of objects with different shapes and weights.
Augmented Reality on the Large Scene Based on a Markerless Registration Framework
Mar 07, 2020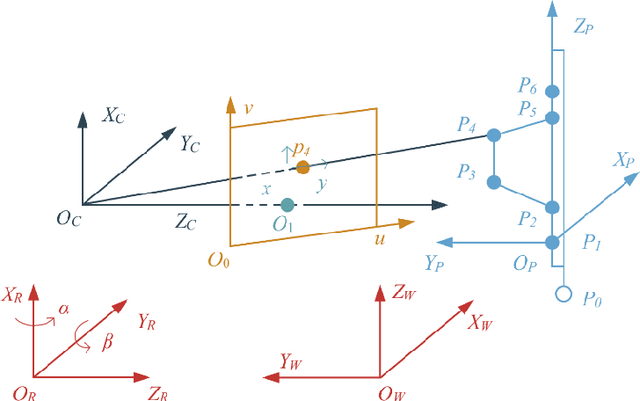

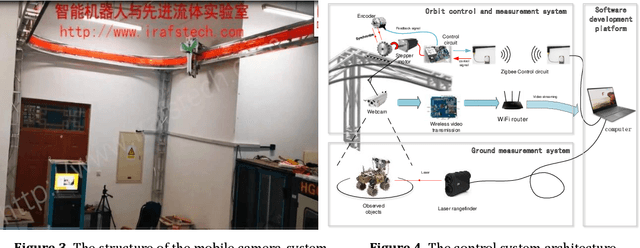
In this paper, a mobile camera positioning method based on forward and inverse kinematics of robot is proposed, which can realize far point positioning of imaging position and attitude tracking in large scene enhancement. Orbit precision motion through the framework overhead cameras and combining with the ground system of sensor array object such as mobile robot platform of various sensors, realize the good 3 d image registration, solve any artifacts that is mobile robot in the large space position initialization problem, effectively implement the large space no marks augmented reality, human-computer interaction, and information summary. Finally, the feasibility and effectiveness of the method are verified by experiments.